近平静/波浪水面地效飞机气动特性风洞试验
2021-11-19 07:25高立华黄龙太王昆仑
实验流体力学 2021年5期
高立华,黄龙太,傅 澔,王昆仑,黄 勇,*
1.中国空气动力研究与发展中心,四川 绵阳 621000;2.中国特种飞行器研究所,湖北 荆门 448035
0 引言
相比常规飞机,地效飞机升阻性能优异,在湖泊海洋环境下,运行速度远高于各类舰船,具有安全、经济、高速、舒适、不受空中交通管制限制等优点,具有广阔的应用前景[1]。对地效飞机而言,荒漠、滩涂、河流等可近似为水平地面;而地效飞机近风浪海面飞行时,其气动特性及周围流场结构与其在水平地面上飞行时存在较大差异[2],运动参数及其导数随飞行高度有着显著的非线性变化,影响飞行稳定性[3]。秦绪国等[4]的数值模拟研究表明,地效飞行器在水面巡航时的气动性能受波浪的影响很大,水面波浪形状会引起气动力的非定常变化。目前,关于地效飞机近水面飞行气动特性的研究不多,且主要集中于数值模拟方面;由于周期长、成本高、相似性模拟困难等原因,相关试验研究开展得很少[2-7]。
研究地效飞机接近地面时的气动特性,可采用的试验方法大致可分为[8-9]对称法、拖曳法、固定地板法和活动地板法。对称法仅能模拟水平地面且需同时采用两套模型,应用并不广泛;拖曳法能够模拟任意形状的地面或波浪水面,但受拖车速度限制,模拟飞行速度较低,应用也不多;固定地板法目前应用相对较多;活动地板法技术复杂,以前应用极少,近年逐渐有所增多。
采用固定水平地板开展地面效应试验时,地板表面会形成具有一定厚度的速度低于风场气流速度的附面层,此附面层的存在将对测量结果产生一定干扰;水平活动地板是消除地板附面层及其干扰的最有效方法。杨美等[7]利用水平固定地板和水平活动地板开展了NACA0012 翼型地面效应试验,研究结果表明:模拟高度较小时,固定地板附近边界层容易发生分离,导致误差较大,水平活动地板的试验结果更加真实,是研究地面效应的有效手段;而模拟高度增大到0.5 倍平均气动弦长以上时,两者差别不大。陈新等[10]数值模拟了三维机翼掠海飞行时的自由水面兴波问题,发现机翼扰动在自由水面上兴波的波幅非常小,可以忽略不计;当研究波浪水面对机翼气动力的影响时,可以用刚性波浪地面代替柔性波浪水面。秦绪国等[4]的数值模拟结果也表明,固壁波形与水面波形引起的翼型气动特性波动量基本一致,固壁波形的结果更加规则。因此,本文采用刚性波形模拟波浪水面对地效飞机的影响;与柔性波形相比,采用刚性波形也更有利于获得稳定可控的试验条件。
本研究在中国空气动力研究与发展中心低速空气动力研究所Φ3.2 m 低速风洞开展。地效飞机飞过平静水面情况采用固定水平地板进行模拟。为研究地效飞机近波浪水面飞行的气动性能,新研制了固定波浪地板,同时对Φ3.2 m 低速风洞水平活动地板试验装置[11-12]进行改造和功能拓展,设计加工活动波浪地板。利用新研制的试验装置模拟空中、近平静水面和近波浪水面飞行状态,获得了地效飞机无动力和螺旋桨带动力条件的气动特性风洞试验结果。
1 试验模型与装置
1.1 试验模型
地效飞机外形如图1所示。风洞试验采用1∶11全金属模型,展长2.0 m,平均气动弦长0.5 m,机翼总面积0.85 m2。

图1 地效飞机示意图Fig.1 Sketch map of the wing-in-ground craft
1.2 试验装置
试验在风洞开口试验段中进行。通过稳动压方式提供合适风速,试验风速范围为20~50 m/s。对于地效飞机近平静水面飞行状态,采用固定水平地板进行模拟,如图2所示。通过地板下方的液压支柱实现地板升沉,以模拟不同的近平静水面飞行高度。模型采用背撑方式支撑,背撑系统可以实现模型姿态角及上下位置的变化(迎角:–15°~30°,侧滑角:–45°~45°,升沉位移:–0.2~0.6 m)。采用镜像两步法扣除支架干扰。

图2 水平地板试验Fig.2 Wind tunnel test with the flat ground floor
对于地效飞机近波浪水面飞行状态,采用专门研制的固定波浪地板和活动波浪地板进行模拟。如图3所示,固定波浪地板分为4 块:前缘、后缘和波形部分(2 块)。正弦波形部分在180°相位处断开,前后2 块半周期波形调换位置即可组合为图3 下部所示波形。试验中,飞机模型固定不动,波浪地板向前、后分别可移动1/4 波长,使90°~270°相位处于模型参考点下方。试验现场如图4所示。
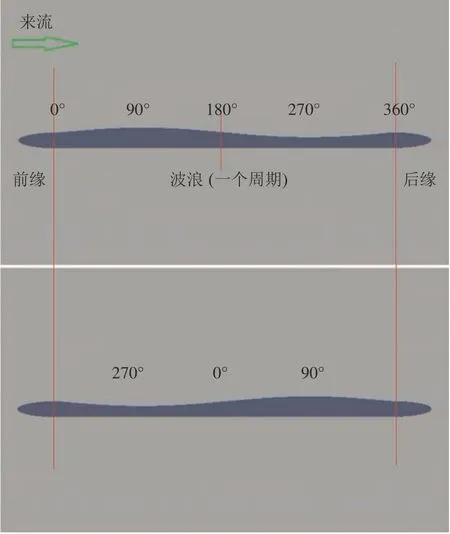
图3 固定波浪地板示意图Fig.3 Sketch map of the wavy ground floor

图4 固定波浪地板试验Fig.4 Wind tunnel test with the wavy ground floor
活动波浪地板是在水平活动地板基础上加装具有2 个波形的活动波浪带。活动波浪地板主要由运行框、前带轮、后带轮、活动波浪带等部件组成。活动波浪带由后带轮驱动,前带轮进行张紧、纠偏等调节,形成稳定运动的波浪,如图5所示。活动波浪带速vbelt最高可达20 m/s,带速误差≤0.1 m/s。活动波浪地板可以通过升降支柱调节与模型之间的垂向距离,从而模拟不同的近水面高度(图6)。
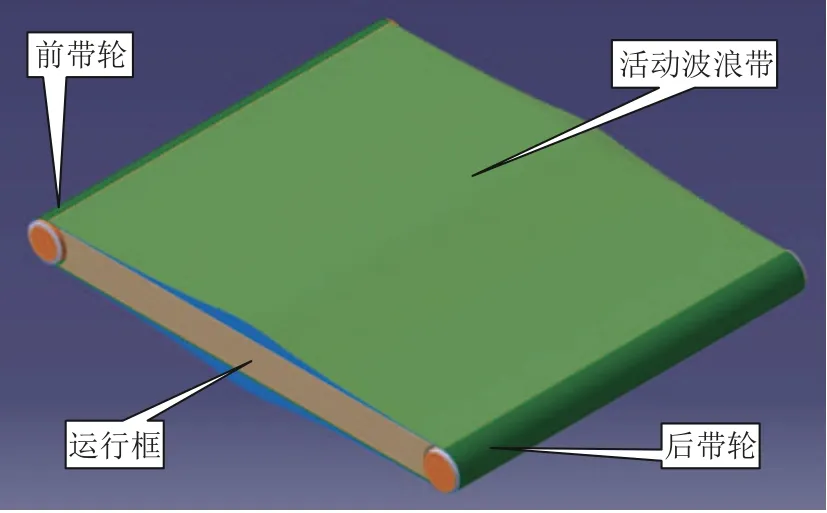
图5 活动波浪带示意图Fig.5 Sketch map of the moving wavy belt

图6 活动波浪地板试验Fig.6 Wind tunnel test with the moving wavy belt
固定波浪地板和活动波浪地板模拟实际波长34.4 m、波高1 m 的波浪,缩比后波长3.13 m、波高0.091 m,波形沿宽度方向无变化。
试验中需保持活动波浪地板运行与天平动态采集同步(即需标识天平数据与波浪相位的一一对应关系),通过光电传感器实现:在活动波浪带特定位置粘贴反光材料,以光电传感器向活动波浪带发射光束,当反光材料运行至光束位置,反射光触发传感器内光电转换单元,产生电脉冲信号(不触发时为近似常值的背景信号);PXI 数采系统各通道同时动态采集天平信号及光电传感器信号,获得信号矩阵X(m,l),m为采集通道,l为采集次数,光电传感器电脉冲信号对应的l值在信号矩阵中就标识出相应的波浪相位,从而将天平信号与波浪相位对应起来。
主要试验参数如表1所示,螺旋桨拉力系数Tc和前进比λ定义如下:
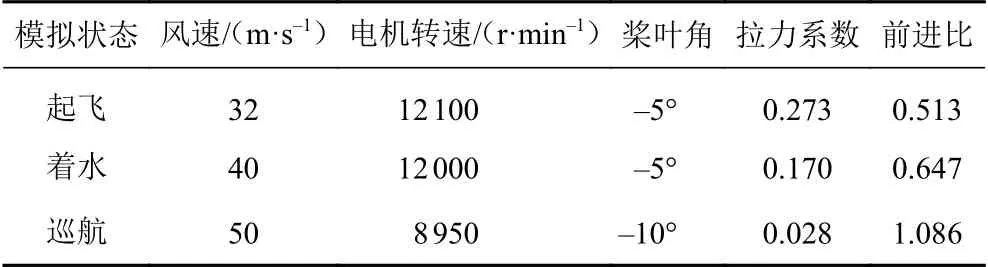
表1 主要试验参数及其模拟的飞行状态Table 1 Flight condition and corresponding wind tunnel test parameters
式中,T、D分别为螺旋桨拉力和直径,q、v分别为来流动压和速度,S为机翼面积,n为螺旋桨(电机)转速。
2 试验结果
2.1 平静水面及滑流影响
图7~9 给出了地效飞机起飞构型、着水构型和巡航构型的升阻特性试验结果(图中纵轴CL、CD分别表示升力系数和阻力系数,横轴α表示迎角)。起飞构型和着水构型的襟翼偏角δf= 15°、发动机相对机身的俯仰偏角φp= 24°;巡航构型δf= 0°、φp= 2°。带动力试验结果扣除了名义拉力,即带动力试验结果主要是螺旋桨滑流的贡献。水平地板状态模拟近地高度H/cA= 0.5 的情况,H为模型力矩参考中心距离地板表面的高度(对于波浪地板则指距离中立平面的高度),cA为机翼平均气动弦长。
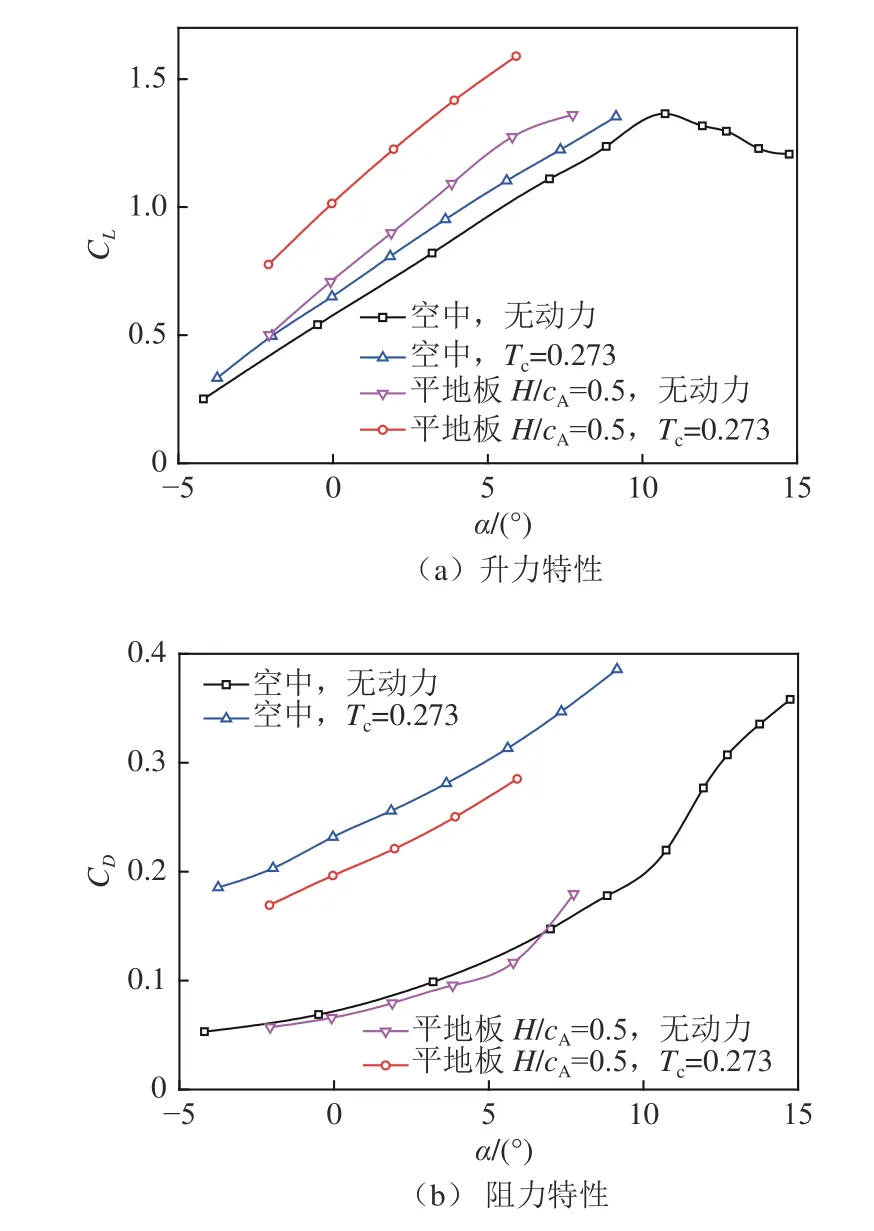
图7 起飞构型升阻特性Fig.7 Lift and drag of the wing-in-ground craft taking-off configuration
由图7 可知,与空中无动力状态相比,水平地板无动力状态时地效飞机升力系数明显增大、升力线斜率增大,同时阻力系数有所降低,符合地面效应的典型规律;空中带动力状态时,升力线向上平移,同时由于螺旋桨滑流的影响,阻力系数明显增大。然而,水平地板带动力试验的升力系数增量远大于仅带地板和仅带动力引起的升力系数增量的简单叠加。以迎角0°为例,地板对升力系数的贡献量0.138,带动力对升力系数的贡献量0.074,两者简单叠加为0.212,而水平地板带动力组合试验升力系数的增加量为0.439,两者存在0.227 的差量,占实际值的52%。其主要原因为:在起飞状态下,螺旋桨滑流吹向机身、机翼、浮筒和地板组成的升力腔,为起飞贡献超额升力增量,即模型、带动力和地板之间是非线性强耦合,简单试验状态结果的叠加未考虑升力腔效应,存在非常大的误差。
图8 给出的着水构型升阻特性与起飞构型的规律一致,但由于拉力系数相对较小,滑流和升力腔引起的升力系数增量小于起飞构型。图9 为巡航构型的升阻特性,由于拉力系数很小,滑流很弱,更重要的是发动机俯仰偏角仅为2°,滑流几乎水平流向后方而不是吹向升力腔(参考图1 右下的侧视图),模型、带动力和地板之间的耦合效应很弱,升阻特性基本可以进行叠加。
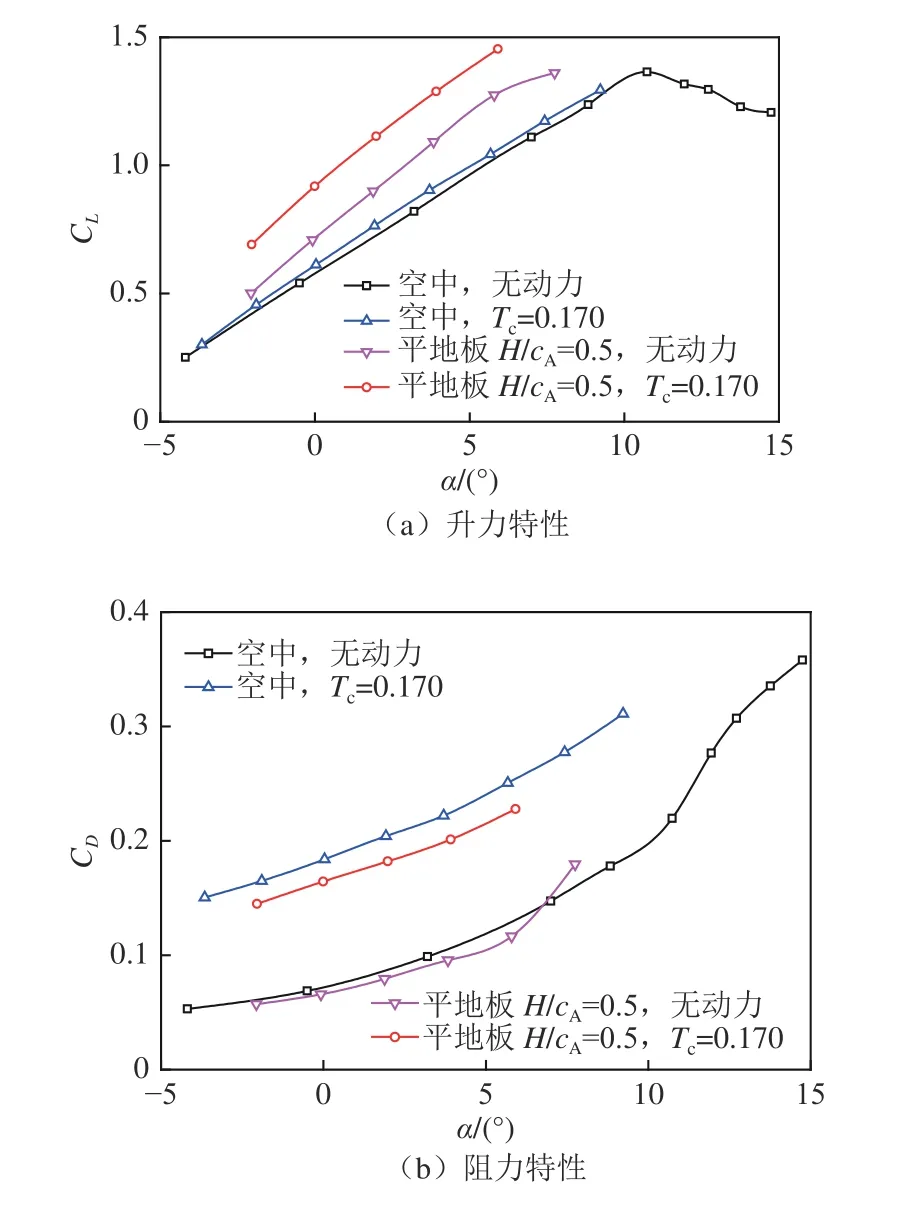
图8 着水构型升阻特性Fig.8 Lift and drag of the wing-in-ground craft landing configuration
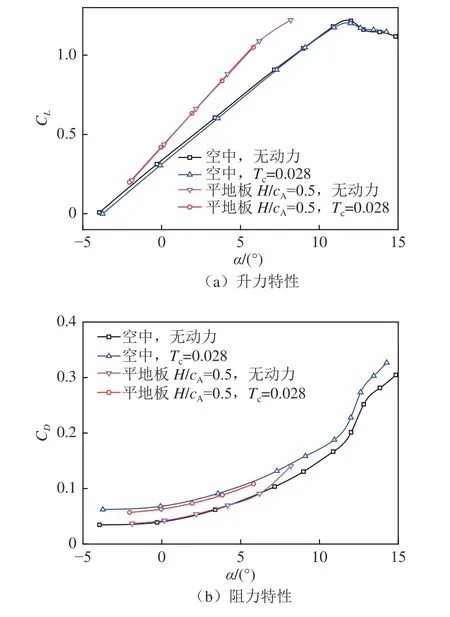
图9 巡航构型升阻特性Fig.9 Lift and drag of the wing-in-ground craft cruising configuration
2.2 波浪水面的影响
在活动波浪地板运行过程中,地效飞机承受着周期性脉动载荷。将十余个周期的试验结果按照对应相位平均到一个周期,如图10所示,图中相位角θ= 0°表示波谷处于地效飞机模型力矩参考中心正下方,90°、180°、270°分别为中立位置、波峰、中立位置处于力矩参考中心正下方。随着活动波浪带速vbelt从来流速度的15%增大到60%,载荷的基频波动幅度逐渐减小、相位逐步前移,但倍频波动振幅增大;带速超过来流速度的60%之后,载荷波动呈现比较复杂的状态,且波动幅度增大。
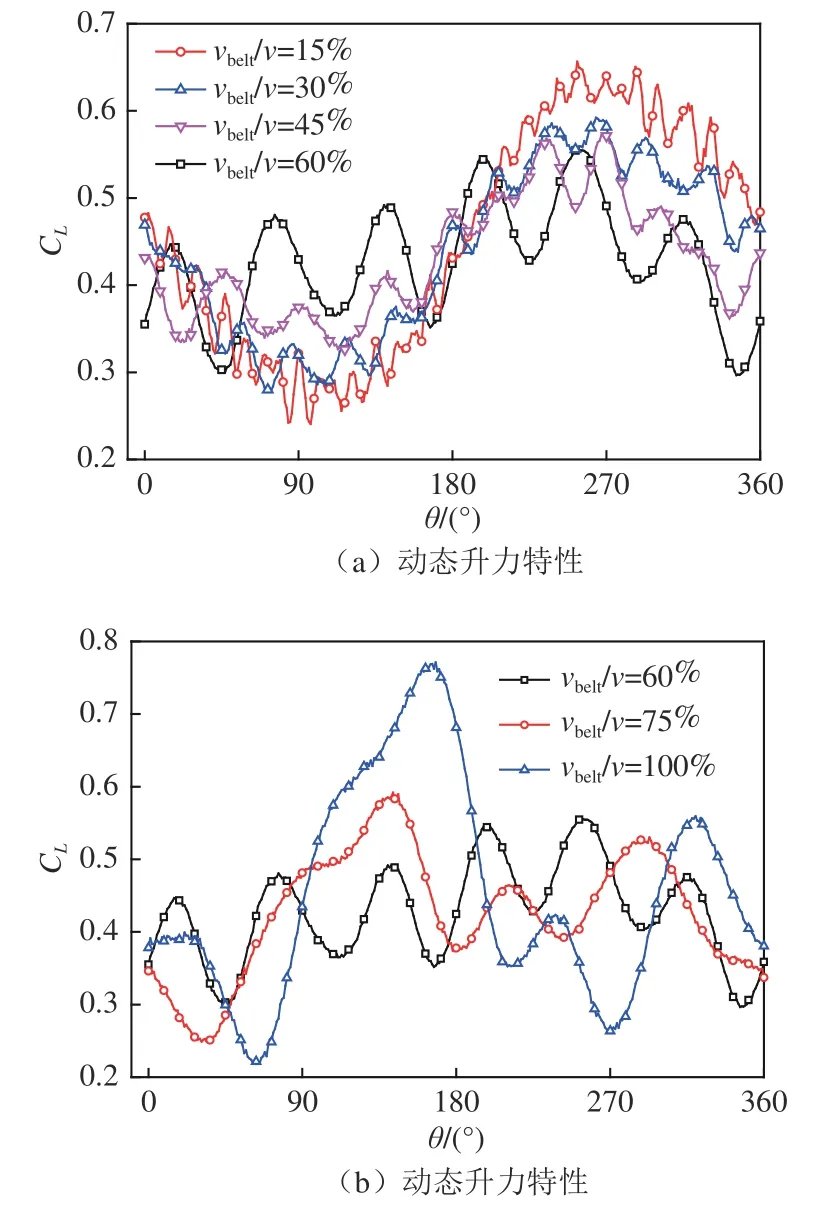
图10 活动波浪带运行速度对全机升力特性的影响(δf = 0°、H/cA = 0.5)Fig.10 The effect of moving wavy belt speed on the lift(δf = 0°,H/cA =0.5)
图11 为三种地板的升力系数试验结果对比。为便于对比,活动地板是完全平均的试验结果,即在每个迎角将所有相位点试验结果平均到单一值。图中固定波浪地板的试验结果表明,当模型力矩参考中心位于波浪的不同相位时,升力系数约有±0.25 的波动幅度,但其均值基本与采用水平地板的试验结果一致;在中立位置(正弦0°、正弦180°)升力系数变化最大,主要是由机翼下方流道收缩/扩张及流动方向上扬/下洗导致。在各种带速情况下,活动波浪地板升力系数的平均值基本与水平地板试验结果重合。因此,三种地板得到的升力系数平均值基本一致。
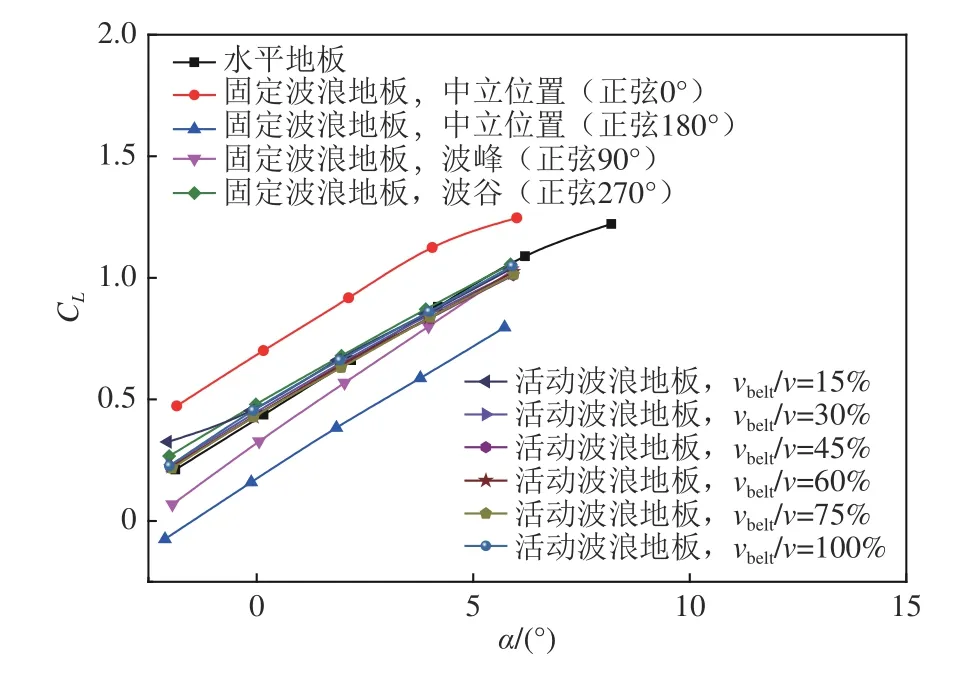
图11 三种地板对升力系数影响的试验结果对比(δf = 0°、H/cA = 0.5)Fig.11 The effect of floors on the lift coefficient(δf = 0°,H/cA = 0.5)
图12表明:随着活动波浪地板模拟高度的增大,
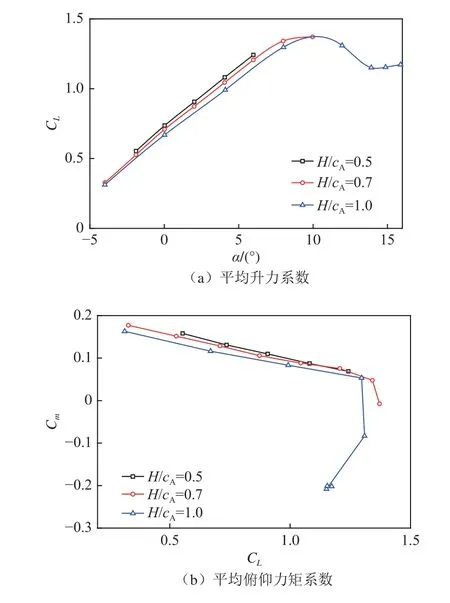
图12 活动波浪地板模拟高度对气动载荷平均值的影响(δf = 15°,v=32 m/s,vbelt = 10 m/s)Fig.12 The effect of simulating flight altitude of the moving wavy belt on averaged aerodynamics(δf = 15°,v= 32 m/s,vbelt = 10 m/s)
升力系数平均值降低,纵向静安定度下降;同时,如图13所示,气动载荷中升力系数的波动幅度明显降低,俯仰力矩系数的波动幅度变化不大,主要原因为:飞机为T 尾布局,对俯仰力矩贡献最大的平尾距离地板较远,受地面效应的影响相对较小,因此俯仰力矩系数的波动幅度随高度变化不大。
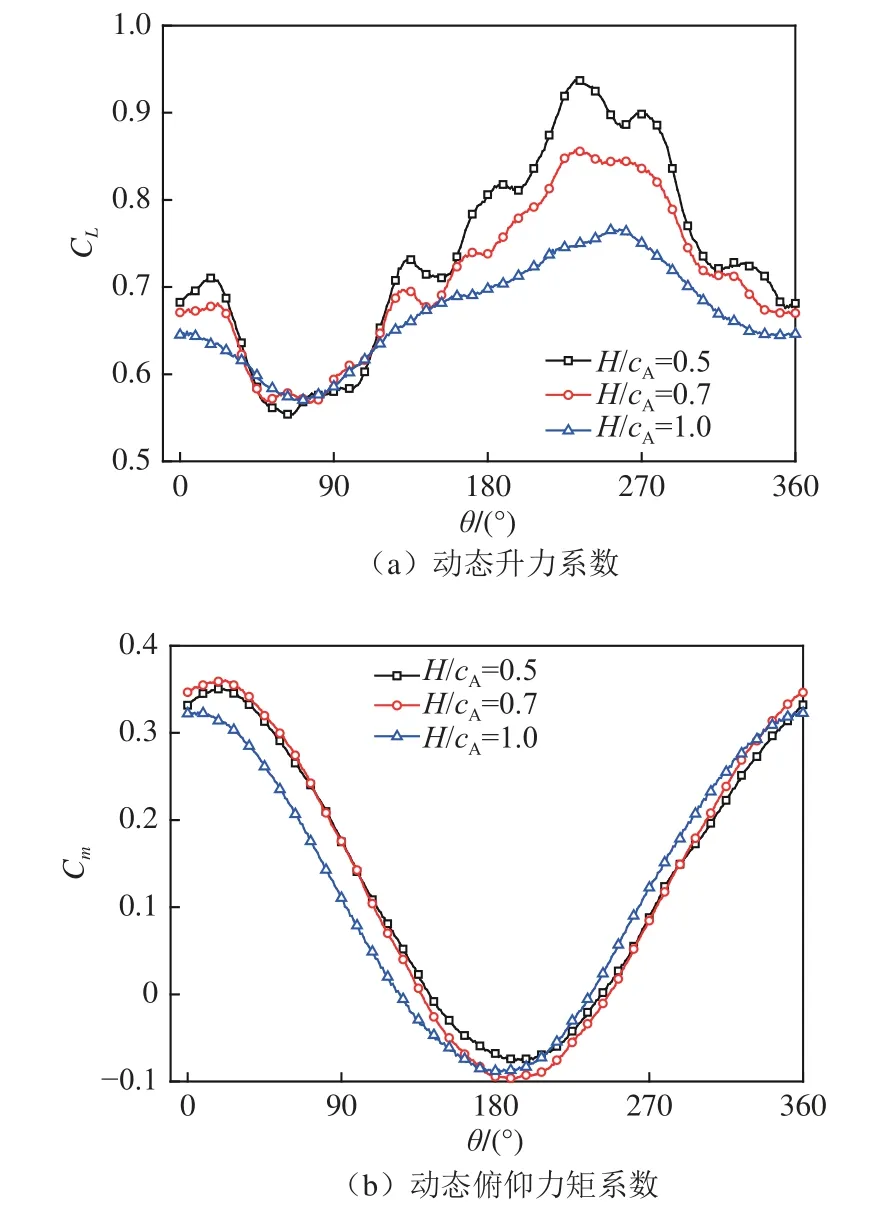
图13 活动波浪地板模拟高度对动态气动载荷的影响(δf = 15°,α= 0°,v= 32 m/s,vbelt = 10 m/s)Fig.13 The effect of simulating flight altitude of the moving wavy belt on dynamic aerodynamics(δf = 15°,α= 0°,v= 32 m/s,vbelt = 10 m/s)
3 结论
1)螺旋桨带动力和地板对地效飞机起飞/着水状态气动性能有很强的耦合影响,并非简单叠加关系。
2)地效飞机在波浪的不同相位上方时,升阻性能和俯仰力矩均存在较强变化,影响飞行平稳性。
3)随着飞行高度增大,升力系数均值降低,纵向静安定度下降,同时升力系数的波动幅度明显降低。
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
北京航空航天大学学报(2021年9期)2021-11-02
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
锦绣·下旬刊(2020年9期)2020-01-28
科学Fans(2019年4期)2019-04-30
中国科技纵横(2017年2期)2017-03-24
中学课程辅导·教师教育(中)(2017年2期)2017-03-24
少年科学(2014年7期)2014-08-18