
车辆重路由与智能交通灯协同控制研究
2021-11-19 08:17杨留辉曾连荪周煜轩
计算机仿真 2021年10期
杨留辉,曾连荪,周煜轩
(上海海事大学信息工程学院,上海 201306)
1 引言
随着科技和经济的发展,我国车辆数量在不断攀升,这对道路交通带来了巨大的压力,各种交通问题屡见不鲜。在智能交通系统中(ITS),利用EasiTia[1]、图像识别等技术可收集交通信息[2]。目前,减轻交通拥堵的方法有两种:1)车辆改道;2)交通灯的控制策略。通过深入研究发现,目前交通的控制主要停留在了主干道路,而忽略了人行道。交通拥堵不仅是由车辆数量的增加引起的,交通事故更容易引起交通拥堵。本文提出了一种新型的交通架构来减少交通拥堵[3]或事故[4]以及行人的不必要等待时间。通过对道路信息的获取以及行人信息。当道路拥堵或发生事故时,该架构利用k-最短路径算法[5-6]找出不同合适路线对需要改道车辆采用主动改道策略,并通过交通灯的控制策略(考虑下游交通、不考虑下游交通的控制)加以辅助。利用密度图[2]来识别斑马线附近的行人与车辆的关系来判断交通灯的配时,减少行人的不必要等待时间。
2 交通架构
本文提出的架构由三部分组成,如图1,分别是:1)交通信息获取、模型的建立与交通预测;2)车辆改道策略;3)两种交通灯的控制策略。其目的是实时获取道路信息,来进行车辆的改道和交通灯的控制。通过图像识别,判断道路是否发生事故与行人的数量。一旦发生拥堵,该架构就会采用主动改道策略,通过k-最短路径算法[5-6],计算改道的优选路径,在进入拥堵之前进行改道,同时交通灯策略为拥堵路段进行动态的配时。在车辆较少的路段,它会以行人与车辆的行驶状态决策出交通灯的状态。在接下来的章节中,将详细的介绍本框架。

图1 交通管理架构
3 模型的建立
为了对车辆改道与交通灯的控制进行仿真,必须建立对交通状况的评价模型。首先是关于静态道路信息模型的建立,定义静态道路覆盖率为
(1)
NV表示在某段道路上的车辆数,La表示车辆的平均长度(包括与前车的行车间距),Lp表示该路段的长度,Np表示该路段的车道数。I1越大表示在该路段的车辆越多,越容易发生拥堵。根据实际的车辆行驶规律定义动态的道路覆盖率为
(2)
NI与NO分别表示该道路的输入与输出车辆数。车辆的输入表达式为
(3)
Vi表示第i辆的平均速度,Tg表示在某时刻该车辆行驶到停车线以前的绿灯时间,Nstop表示车辆因事故停止的车辆数。输出与输入的表达式相似。
为了提高道路信息的准确性,判断是否有事故发生,本文利用残差神经网络模型[7],来识别车辆是否发生事故。在收集了10000张图片作为数据集之后,经过训练得出了训练集与测试集的精度图和损失变化图如图2和图3。

图2 精度图 图3 损失变化图
4 控制策略
4.1 车辆的改道策略
一旦预测前方道路交通拥堵或识别出前方事故发生,将进行车辆改道。根据不同的车辆指定不同的改道策略。
4.1.1 车辆的选择
如果某路段发生交通拥堵,不同车道的车进入此路段时,就会增加行驶时间。因此,通过车辆重路由改变车辆预期行驶的路线[8-9],不仅减小道路的拥堵程度,还能减少行驶时间。然而对于那些不经过事故或拥堵路段的车辆来说,改道是没有必要的。如图4,在P0路段出现交通事故或者拥堵,可以知道C2、C5、C8等远离P0路段的车辆改道不仅增加行驶时间,有可能造成其它路段的拥堵,而C9、C10等将行驶在P0路段的车辆改道,将减小道路拥堵,缩短行驶时间。

图4 车辆与道路信息
4.1.2 道路选择概率
关于车辆重路由,在道路发生拥堵时,给部分车辆的行驶路线重新规划,在这种情况下,可能会导致重新规划的路段发生拥堵,最好的方法就是为车辆提供多条优选路段。本文进行了几种最短路径的算法比较[5,10-13],最终选择了k-最短路径算法[5](Yen’s算法)。在获取路段信息后,给出更适合行驶的最短路径,本文在利用k-最短路径算法给出几条选择路线以后,计算出选择某条路径的概率,概率是根据其最短路径下游路段的车辆信息来计算的,得到概率为
(4)
λ表示该道路的重量系数,l表示最短路径的和,i表示第i条路径。根据公式与实际情况可知,道路车辆越多信息量越大,该架构选择该道路的可能性就越小。受路段信息的影响,在拥堵路段产生的概率较小,但是在该路段拥堵现象或者事故排除以后,将供车辆正常行驶。
4.2 交通灯的控制策略
除重路由策略以外,交通灯的动态配时也是解决交通拥堵的有效办法。在交通运输系统中,交通灯是安装在交叉路口上的有效控制车流的必要装置[14-15]。交通灯系统的组成分为两部分[2]:一、交通灯的颜色变化;二、颜色的持续时间。本节就针对交通灯颜色持续时间进行动态改变。在进行动态改变交通灯配时的过程中出现两个问题。
4.2.1 不考虑下游交通状况
如图5,假设在交叉路口处,交通灯的持续时间,根据路况进行动态配时(T1,T2),道路(P1,P2)信息(I1,I2),在P1为绿灯时,P2必定为红灯。其路灯持续时间表述为

图5 不考虑下游信息的交通灯控制
(5)
(6)
在这里15是路灯持续的静态时间,LP1是路段P1的长度,单位为m,V(P1)是车辆在P1的限定速度,单位m/s。当该路段输入输出相等时,n=1;当输入大于输出时,n=2。路段P2红灯的持续时间Tr(P2)=Tg(P1)。
4.2.2 考虑下游交通状况
如图6,假设路灯持续时间(T1,T2)下游路段(P3,P4)信息(I3,I4)可以获取,为了使模型更容易理解,假设(P1,P2)是直行道路(不转弯且单向)。在不考虑下游时,如果P1的路面覆盖率较大时,Tg(P1)就会增大,当下游交通状况差时,Tg(P1)的持续时间变长,将导致下游情况更差。在这样的情况下,P1与P2和P3有竞争关系,P2与P1和P4也有竞争关系,因此其路灯持续时间定义为

图6 考虑下游信息的交通灯控制
(7)

(8)
在这γ∈[0.5,1]是加权信息,其它参数同上式(5),路段P2红灯的持续时间Tr(P2)=Tg(P1)。
4.3 人行道上交通灯的控制策略
现实生活中,在交叉口处,持续的红灯不仅影响行车司机的心情;在各个方向没有车辆行驶时,持续的红灯同样还影响行人的心情,因为增加了行人的不必要等待时间,这就有可能出现闯红灯现象,同时出现不可预知的交通状况。这种情况下,本文提出了人行道上交通灯的控制策略。当系统利用摄像机通过图像识别等技术判断当前道路上(如南北与东西方向)无行驶车辆或者仅在与行人行驶方向相同时(如图7,8),斑马线上与交叉口上的红灯停止绿灯亮起重新进入计时。这样既能解决行人与车辆司机的不必要等待时间问题,也能降低事故的发生达到节省资源目的。路灯的实现形式如Tr(P3)→Tg(P3)。

图7 识别前 图8 识别后
4.4 交通灯的控制策略扩展
在上述的两种情况下,如果发生交通事故,交通信息量必会增加,这时延长交通灯的持续时间,无疑会给此路段造成严重后果。当系统判断出此路段是由于发生交通事故产生的拥堵,此路段的路灯色相将持续为红色,直至事故处理结束。这样既避免了二次事故,也为上游要经过此路段的车辆节省了行驶时间。
5 实验
在实验中,对交通拥堵程度、行人与驾驶者的出行时间以及到达车辆数进行比较。
5.1 实验设置
在微观仿真平台VISSIM上进行仿真。VISSIM是一种微观的、基于时间与驾驶行为的仿真平台,可以运用各种控制逻辑[16]。路网是由VISSIM中的各种工具根据现实交通规则(如右行原则)画出。VISSIM的COM端口为仿真(控制车辆改道和交通灯的策略)提供了方便。
改道车辆配置如下:
1)车辆平均长度为4.5m,最小间距为2m。
2)车辆数为1500辆,行人数量为500人,行程随机。
3)车辆到达目的地后,相当于行使出路网,不影响当前仿真路网。
4)穿过马路后,不影响其它人行走。
5)交通拥堵阈值θ=0.6,目的地的个数den=2,最短路径k=3。
最大仿真时间为1500秒,设定上下班高峰期。对每一个参数的变化做了50次的重复实验,并记录数据,求取平均值。在静态交通中,本文设定路灯持续时间为15秒。为了验证最终结论,本文将不同方法的结论记录以下道路评价标准:1)道路的平均覆盖率;2)到达目的地(小区、商场等)的车辆数量(驶出路网例外的车辆不在计数内)以及行人的数量;3)到达目的地车辆与行人的平均行驶时间。
5.2 车辆改道评价
针对车辆改道,有几个参数将影响其性能,下面将研究这些参数对其性能的影响。
1)拥堵阈值[2]与目的地的增加:拥堵阈值θ={0.5,0.6,0.7}、目的地的个数den={1,2}。最短路径k={2,3,4}在路网上仿真。用道路的平均覆盖率、到达目的地的车数和重路由车辆数作为研究参数的参考依据。首先用静态的配时策略,采用线性模型与深度学习预测模型。结果见表1。可以从表中观察到当θ=0.6、den=2与k=3时,道路覆盖率最小。较小的拥堵阈值将使改道更加频繁,预防交通拥堵。较多的目的地,缩短行驶时间。较多的路线抉择,可以缓解交通拥堵。同时道路覆盖率将会降低。多条规划路径与多个目的地将对驾驶者驾驶安全造成一定程度的影响。

表1 不同参数的重路由指标结果
2)路段拥堵是否被识别TJ=(0,1)、事故是否被识别TA=(0,1)与两者是否被处理HT=(0,1)对车辆行驶中参数的影响。在实验中利用VISSIM二次开发[17]设定随机车辆减速为0与车身变红来代替事故的发生,仿真数据见表2。本部分用道路的平均覆盖率、到达目的地的车数和平均行驶时间指标对其进行对比分析。

表2 交通路况的识别与处理结果
5.3 交通灯的控制评价
本节分为两部分:第一部分是关于车行道上的交通灯的控制。此部分分为三个评价因素:1)静态交通灯策略;2)不考虑下游交通流量的交通灯策略;3)考虑下游交通流量的交通灯策略。仿真数据见表3:

表3 不同交通灯的控制策略结果
对三组数据进行对比分析发现动态交通灯策略均优于静态交通灯策略,因为静态交通灯策略不能根据实际交通状况改变交通配时,导致行驶时间、拥堵道路数量等均增加。考虑下游交通流量的交通灯的控制策略优于不考虑下游交通灯的控制策略,原因在于前者能根据下游交通流量适当的增加路灯的持续时间,大大降低了交通拥堵等现象,改善了路网中的各项指标。第二部分是关于人行道上交通灯的控制。通过系统检测人行道与车道情况,来控制交通灯的配时。本节以静态的斑马线交通灯策略与动态的斑马线交通灯策略,来评价两种策略的效果。行人的平均出行时间是从路边穿过马路到另一边来计算的。仿真数据见表4。
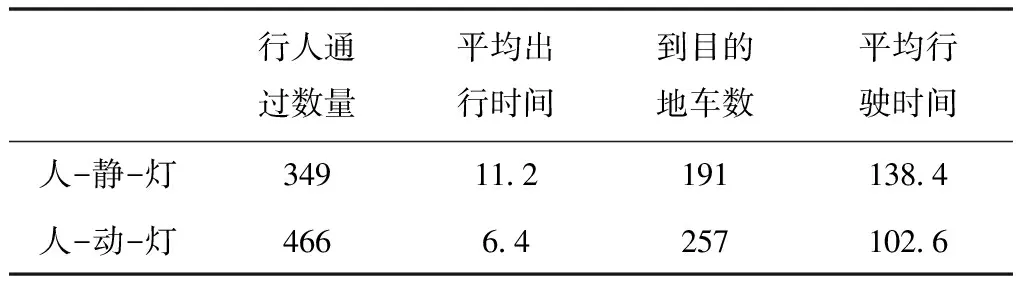
表4 人行道交通灯的控制策略结果
从数据分析可知,斑马线上动态的交通灯策略优于静态的交通灯策略。
5.3 架构的整体评价
在本节中,将车辆重路由与交通灯的控制相结合的框架进行整体评估,数据见表5。本节将该框架与其它三种交通策略进行比较:

表5 车辆重路由与交通灯的控制结果
1)基本交通策略
2)动态交通灯的控制策略
3)车辆重路由策略
观察表5不难发现本文架构的数据明显优于其它三种策略。
在交通路网中运用不同策略的仿真结果,见图9,图10。平均绘制次数为50次,时间间隔按需求设定。图中可以清楚地看出车辆重路由策略比基本交通策略要好。动态交通灯的控制策略在上下班高峰期表现较差。在联合结构策略比其它三种策略整体上要好(表5的数据平均中可以看出),但是在上下班高峰期也同样会差一些。
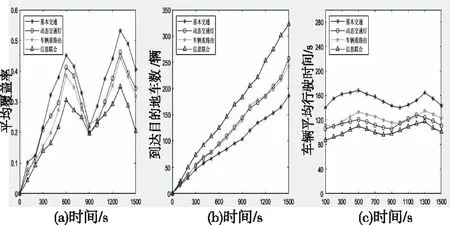
图9 车辆的不同策略对比仿真结果
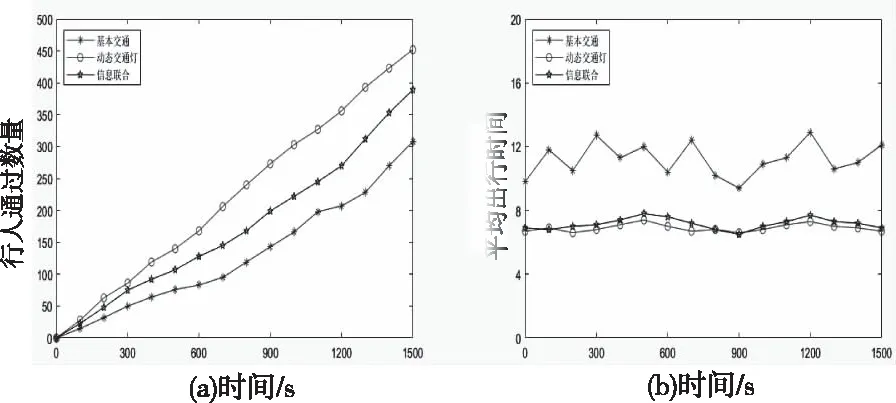
图10 行人的不同策略对比仿真结果
6 结论
本文提出了一种新型的车辆改道以及交通灯的控制架构,首次将人行道与车道的交通灯的动态配时相结合,缓解交通拥堵与减少不必要的等待时间;利用单目标向多目标转换,以缓解拥堵道路压力;将单行单向车道归入路径优化方法中,增宽整体的道路行驶面积减缓道路压力。
利用路边基础设施获取相关信息,在微观交通仿真平台(VISSIM)上对统一交通管理架构进行了仿真,人行道上交通的仿真结果比本文架构仿真结果略优,但整体上可以看出本文架构的整体表现较优,已经达到了减少行人的不必要等待时间、交通拥堵与事故的发生的目的,充分说明本方案的可行性。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
意林(2021年5期)2021-04-18
扬子江(2019年1期)2019-03-08
环球时报(2018-10-15)2018-10-15
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
小天使·一年级语数英综合(2017年6期)2017-06-07
WTO经济导刊(2017年3期)2017-03-17
