5G远程遥控智能车的路径规划设计
2021-11-25 05:42高海军王东成钟奇梁瑞
科技信息·学术版 2021年25期
关键词:路径规划
高海军 王东成 钟奇 梁瑞
摘要:为了方便人们远程购物,设计5G远程遥控智能车,着重于其路径规划设计。自动识别设置路线,然后根据路线走向,实现快速稳定的寻线行驶。智能车以AT89C51 单片机作为系统控制处理器;采用红外传感器获取路线的信息,再进行对车的速度和方向的控制。此外,对整个控制软件进行设计和程序的编写以及程序的调试,并最终完成软件和硬件的测试融合,最终实现预期功能。
关键词:智能车;远程遥控;路径规划
1.引言
为了方便人们远程购物,设计5G远程遥控智能车。利用红外发射管和接收管模块对路面轨迹进行检测,将接收到的轨迹信息传送到单片机中,然后调用PWM调用函数,改变左右PWM占空比,控制电机速度,然后去控制方向,最终实现智能小车按照路面上的预定轨迹进行行驶。
2.主要内容
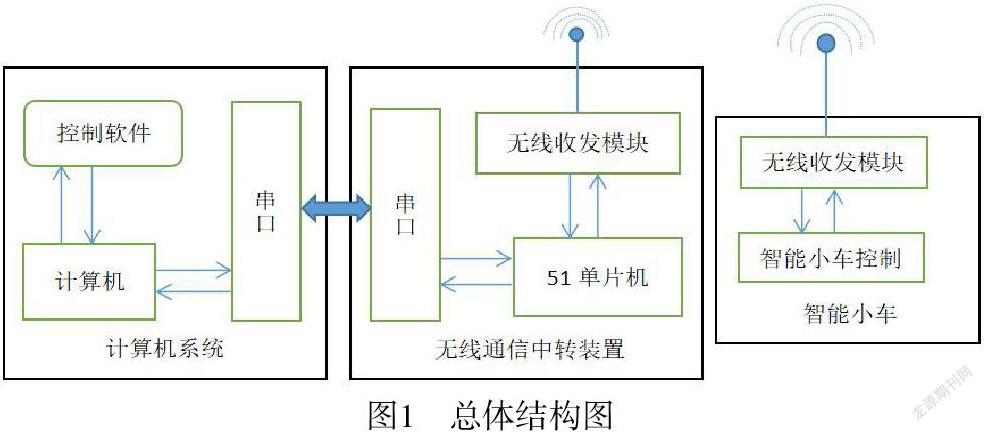
路径规划设计主要包括初始化阶段和按预定轨迹自动行走两个阶段。智能车能够根据路径设计自动识别设置路线,然后根据路线走向,实现自动稳定的行驶。智能车以AT89C51 单片机作为系统控制中心,采用红外传感器获取赛道的信息,通过调用PWM调用函数,改变左右PWM占空比,控制电机速度,来对小车的方向进行控制。此外,经过对整个控制软件进行设计和程序的编写以及程序的调试,完成软件和硬件的测试,最终实现车的自动寻迹行驶功能。安装WIFI视频传输模块,采用Openwrt视频摄像头WiFi模组套件,在WiFi板上运行mjpg-streamer程序可以把USB摄像头的视频进行编码,然后通过WiFi返回给上位机,可以清晰看到智能车行走路径。系统总体设计框图如图1所示。
3.遥控模块设计
遥控模块采用HS10-PWM遥控接收器。
(1)遥控器工作电压:DC 2.8V-3.3V(安装使用2节 1.5V 5号电池)
(2)接收主板工作输入电压范围:DC 6.0V-12V (请使用动力型锂电池,根据马达的电压和功率选择适配的电源设备)
(3)接收主板工作输出电压电流:5路输出/每单路输出电压和电源输入电压相同,其中2个摇杆为电位器油门比例调速控制原理,控制接收板对应的4路输出的电压由低拉高来改变电机的转速;每单路输出最大峰值电流7A,最大持续负载电流4A;
(4)遥控频率:2.4GHZ
(5)实测遥控距离:30-50米(接收板裸露,天线坚起离地高度10厘米,宽敞地面实测遥控距离,加装信号增强器后遥控距离最远可以达到500米);
装上电池打开开关,遥控器的红色指示灯开始闪烁,表示信号等待连接中;把接收板的电源线连接好并通电,打开开关,接收板的电源指示灯亮,遥控器红灯急闪2下后熄灭,表示对频连接成功,然后就可以开始使用了,按下遥控器的操作杆和按钮,就能控制接收主板相对应电路输出电压。
4.WIFI视频传输模块设计
4.1WIFI视频传输模块采用了Openwrt视频摄像头WiFi模组套件。
OpenWRT是一个高度模块化、高度自动化的嵌入式Linux系统,拥有强大的网络组件和扩展性。OpenWRT不同于其他许多用于路由器的发行版,它是一个从零开始编写的、功能齐全的、容易修改的路由器操作系统,可以加快开发速度,这给开发者带来了极大便利。OpenWrt对ARM、X86、MIPS或PowerPC等处理器,都有很好的支持作用。同时附带3000多种软件包,囊括从工具链(toolchain),到内核(Linux kernel),到软件包(packages),再到根文件系统(rootfs)整个体系,用户可以根据自身需要,很方便的自定义其功能来制作固件,可以移植各类功能到OpenWrt下也很方便。简而言之,就是从思科的路由源码改造过来的,一个适用于某些特定芯片的路由器的小型Linux系统。有了这个系统,路由器就不再具有单一上网功能那么简单,还可以在上面安装各种驱动以及程序。把路由器作为平台,用户可以自由地加载USB摄像头、网卡、声卡等设备。
WiFi板上运行着一款叫做mjpg-streamer的视频解析软件程序,是一个优秀的开源project,它可以通过HTTP的方式访问linux上面的兼容摄像头,它可对USB摄像头的视频进行编码,然后通过WiFi传输到上位机,这样就可以看到来自智能小车的视频图像。同时一般路由器都预留有TTL串口,它可以实现调试或者刷机功能。当把这个TTL串口引出来,然后通过安装在路由器里面的Ser2net转发软件,就能把来自WiFi信号的指令传到串口,进行输出。接上5V电源,及TTL(单片机串口电平信号TX、RX、GND)信号线就可使用,编写单片机控制程序,下载到单片机芯片上,经安卓手机WIFI就可以控制小车运动,外加高清摄像头,便可以实时在手机上看到视频。
4.2 传输模块参数
摄像头和WIFI数传模塊都采用DC5V电压供电,摄像头输出格式为mjpeg,输出帧速为30FPS,可以手动调焦,30W高清像素。WIFI数传模块采用TTL串口进行通信,含有64M超大内存处理芯片内置天线,安装不会阻挡,信号稳定且功耗低。
5.避障模块设计
采用红外线避障方法,利用单片机产生38KHz信号对红外线发射管进行调制发射,发射出去的红外线遇到障碍物时反射回来。利用一个管发射另一个管接收,接收管根据外界红外线的接收强弱来判断距离障碍物的远近。为减小外界可见光对红外线接收的影响和干扰,使用250Hz的信号对38KHz的载波进行调制,有利于单片机对信号进行处理。红外线接收管对反射回来的信号进行解调,输出TTL电平。发射距离远近由RW进行调节,本设计调节为10cm左右。利用单片机特有的中断系统,当智能小车遇到障碍物时,控制电机转速使小车转弯,改变方向。由于只采用了一组红外线收发对管,在避障转弯方向上,程序采用遇到障碍物向左转。调试时主要调制发射频率为接收头能接收的频率,可以用单片机程序解决。发射信号强弱可改变可调精密电阻值进行调节。智能车如果多加另外一组红外收发对管,即可实现判断左转还是右转功能。
6.路径规划设计
初始化阶段:人工根据目标轨迹穿过遥控车一次,控制器根据信号强度计算车到各基站的距离,并计算车的坐标位置。控制器还记忆车在初始化阶段的坐标位置,并将其存储为预设轨道自动行走阶段:处于自动行走阶段的车按照预定的行走路径行走,控制器判断车的行走路径是否偏离预设轨迹,如果偏离预设轨迹,则对车的行走路径偏离进行处理,在行走过程中,控制器判断车是否遇到障碍物。如果遇到障碍物,通过调用PWM调用函数,改变左右PWM占空比控,制汽车绕过障碍物。通过多个基站,在车上放置一个接收机,计算出到各基站的距离,得到车的当前位置。这样,车轨道可以根据使用需要任意确定,通过在初始阶段驾驶车轨道一次,车可以通过自学习使轨道行走,精度可以达到5cm 左右,当位置达到时,再通过红外线精确定位,可改变预定路线,遇到障碍物时将绕过。
7.结论
设计5G远程遥控智能车,着重于其路径规划设计。主要实现三个功能。其一,通过单片机控制,采用红外线避障方法,利用单片机产生38KHz信号对红外线发射管进行调制发射,发射出去的红外线遇到障碍物时反射回来。利用一个管发射另一个管接收,接收管根据外界红外线的接收强弱来判断障碍物的远近,实现了避障功能。其二,在WiFi板上运行mjpg-streamer程序可以把USB摄像头的视频进行编码,然后通过WiFi返回给上位机,我们就可以看到来自智能车的视频图像,实现了视频传输功能。其三,通过调用PWM调用函数,改变左右PWM占空比,控制电机速度,加上路径记忆设计,便可精准按预定路线行驶。系统运行正常,下一步将在无线通信距离及效率方面做进一步改進。
参考文献
[1]基于PWM调速的智能小车控制系统实现[J]王海波,冯蓉珍,司俊,黄金彪.科技广场 .2011 (11)
[2]基于Android平台的WIFI遥控智能小车的设计[J].张萍,陈国壮,候云雷,李东.计算机测量与控制.2018(06)
[3]基于机器视觉的智能小车自动循迹及避障系统[J].岳俊峰,李秀梅.杭州师范大学学报(自然科学版).2020(02)
[4]多传感器融合的视觉导航智能车避障仿真研究[J].王檀彬,陈无畏,李进,焦俊.系统仿真学报.2009(04)
基金项目:国家级大学生创新创业训练计划项目“5G遥控多功能购物智能车”(202110066026)。
作者简介:高海军(1997-),男,本科生,自动化专业。
基金项目:国家级大学生创新创业训练计划项目“5G遥控多功能购物智能车”(202110066026)。
猜你喜欢
物联网技术(2016年12期)2017-01-21
中国新通信(2016年22期)2017-01-13
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
科技视界(2016年20期)2016-09-29
电脑知识与技术(2016年17期)2016-07-23
电脑知识与技术(2016年13期)2016-06-29
商场现代化(2016年3期)2016-04-08