基于STM32的输液厅智能辅助机器人的设计与研究
2021-11-28 12:20徐贤炜吴大地余子逸赵兴旺王昱凯
电子制作 2021年20期
徐贤炜,吴大地,余子逸,赵兴旺,王昱凯
(上海理工大学,上海杨浦,200093)
0 引言
近些年来全国各地的医院经常会有许多因拿错药品,输错药品等小失误所导致严重医疗事故的发生,很多这类事件都造成了严重的后果。使用输液厅智能辅助机器人来代替医务人员的部分工作,可以杜绝这些严重后果。合理地使用人工智能可以缓解医院就诊高峰期人手紧张的情况,提高了医院的工作效率。机器人增加的语音交流功能可以和病人进行交流,在一定程度上也会让病人得到放松。在指定地点倒掉药品垃圾残留物的功能也能在一定程度上减少人为的触碰污染。因此该项目在医院、诊所这样的场合可以广泛地投入使用,有一定的市场价值。
1 机器人的系统功能框架
车身部分使用光电管辅助超声波实现循迹与定位。本项目可以达到厘米级的测量精度。车身后方的支架配有药品储存装置,识别药品信息并存储数据,实现智能取药功能,避免药物被拿错;小车可以将药品送至病人输液处,实现自动化,分担部分高峰期医务人员的工作;支架上设有防盗反锁装置,需要医护人员刷卡方能取走支架上的药品,避免出现小车在行进过程中药物被行人碰掉以及药物被误换的情况。车身前部设置的方槽为垃圾存储区,让不便走动的病人和换药的医务人员可以随时投放垃圾。小车可以及时清空垃圾,减少医疗垃圾对环境的污染。通过控制按键,小车判断是否倾倒垃圾;垃圾存储区用电磁铁控制,当小车抵达垃圾倾倒区时,单片机控制驱动电磁铁,让电磁铁给方槽活动板一个斥力,推出垃圾,斥力消失之后,活动板返回原位,完成垃圾清空工作。车载LCD显示药品信息、电量、时间;车载语音系统提示行人避让,防止在行进过程中撞到行人,语音系统还有提示患者药品信息和医嘱的功能。
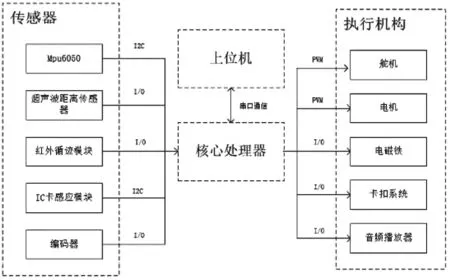
图1 系统功能框架
2 系统总体结构
本系统采用麦克纳姆轮,小车可以实现前后左右无转矩变化方向;采用红外对管实现小车自动循迹功能,小车可以准确地行至目的地,提高了小车的工作效率;在机器人没有接受到指令时,会去到充电处进行无线充电,既保证了机器人工作的效率,不会因为电量匮乏而停止工作。当机器人身上装有医疗垃圾时,机器人会优先移动到垃圾处,自主丢弃医疗垃圾。系统流程图如图2所示。
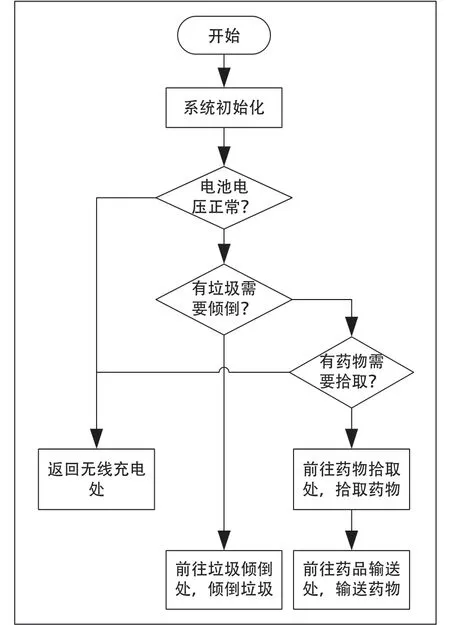
图2 系统流程图
3 系统技术难点
本系统的主要有三个技术难点,分别是麦克纳姆轮的驱动、红外对管的自动循迹、无线充电技术。
■3.1 麦克纳姆轮的驱动
在运动过程中,麦克纳姆四轮的布局形式是随意排列的,每轮在系统中机有相对机体中心的位置,也有姿态角度。

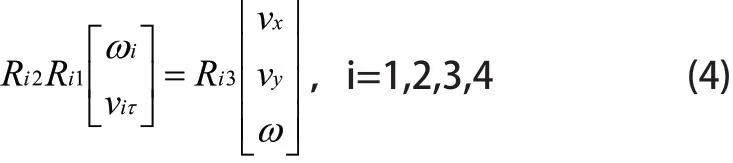
将轮毂中心速度转换到XOY坐标系中,有:

因机器人做平面运动,有:
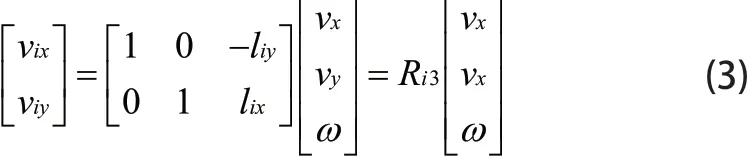
由(2)(3)得机器人逆运动学方程为:
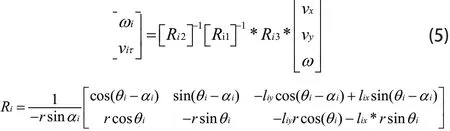
因: det(Ri1)≠ 0,det(Ri2)≠0,

有第i轮的逆运动学方程为:
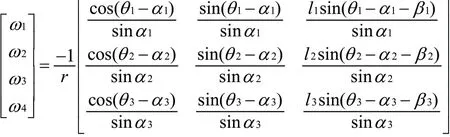
轮转速到中心的逆运动学解为:
系统逆运动学方程的雅可比矩阵为:
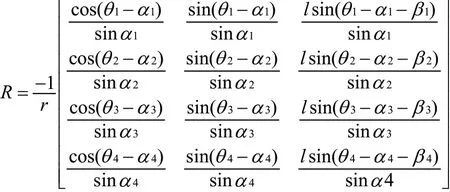
其中式子中的α是驱动轮的偏置角,r是轮子作用的半径,l与θ都是轮子的位置与姿势描述的变量,β是两个圆心与运动方向的夹角,r是轮子作用的半径,v是工作棍子的中心速度矢量。
针对本设计使用的四轮运动系统,当系统逆运动学雅可比矩阵列不满秩时,系统中存在奇异位形,使系统的运动自由度减少,不具有实现全方位运动的能力;当雅可比矩阵满秩的时候,系统具有实现全方位运动的能力。其实系统仅满足运动学还不够,系统还必须具有很好的驱动性能和控制性。
■3.2 红外对管的自动循迹
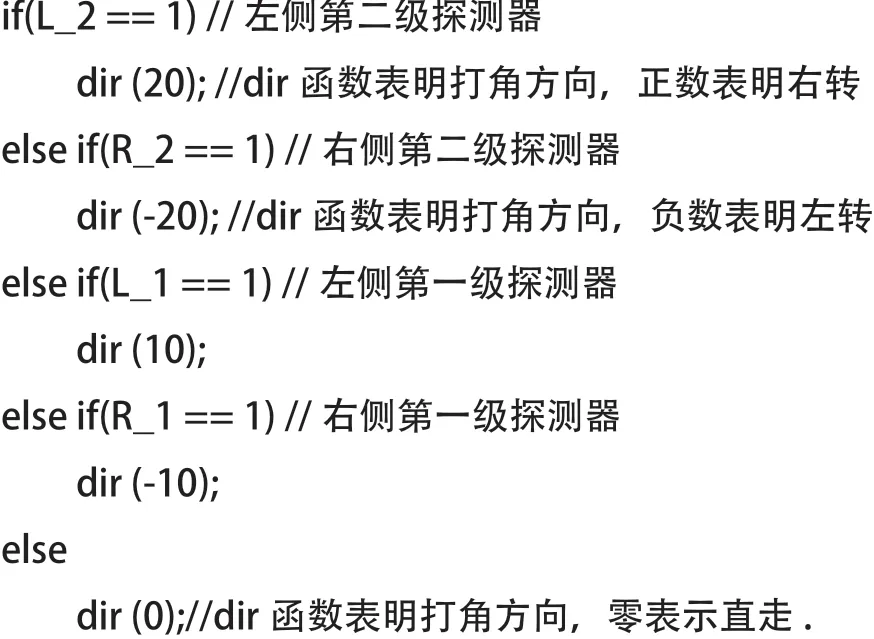
红外对管在机器人循迹行走的过程中,能精确测定黑线位置并确定机器人行走的方向,它需要同时在底盘安装4个红外探测头,进行两级方向的纠正控制,提高了循迹的可靠性。小车前进时,始终保持在两个第一级传感器之间,当小机器人偏离黑线时,第一级传感器见车到黑线,把检测的信号送给小机器人的处理、控制系统,控制系统发出信号对机器人轨迹予以纠正。若小机器人回到轨迹上,则小车会继续行进,若小机器人由于惯性力过大偏离轨迹,越出第一级两个探测器的探测范围,这时第二级探测器动作,再次对小机器人的运行进行纠正,使之回到正确轨道上。代码如下所示。
■3.3 无线充电技术
无线充电技术对人体安全无害处,无线充电使用的共振原理是磁场共振,只在以同一频率共振的线圈之间传输,而其他装置无法接受波段。
无线充电技术分为发射模块和接收模块。无线充电技术的发射模块是主振电路采用2MHz有源晶振作为振荡器。有源晶振输出的方波,经过二阶低通滤波器除高次谐波,得到稳定的正弦波输出,经三极管及其外围电路组成的丙类放大电路后输出至线圈与电容组成的并联谐振回路辐射出去,为接收部分提供能量。接收模块的工作原理:电能经过线圈接收后,高频交流电压经过整流管进行半波整流,电容滤波,再用稳压二极管稳压,输出直流电为电池提供较稳定的工作电压,为电池充电。无线充电接收部分电路图如图3所示。
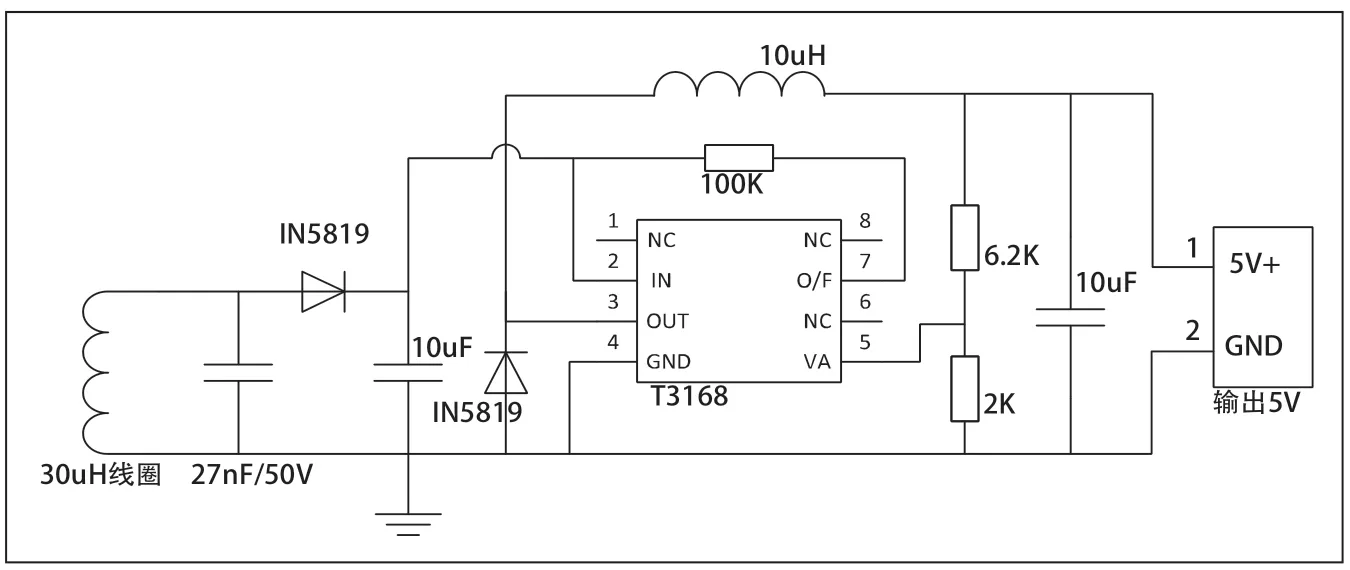
图3 无线充电接收部分电路
4 实验
使用白色布匹模拟医院地面,贴上黑色胶带模拟机器人要行进的路线,以实现机器人的自动循迹,如图4所示。
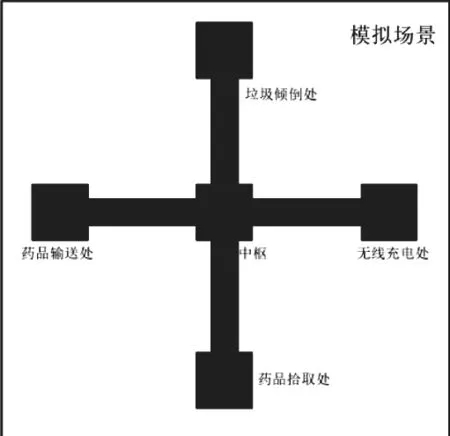
图4 模拟场景
设定取药,倒垃圾,病房,输液厅的地点,让机器人按照设定的程序行进。实验证明,本文设计的循迹方法,可以较好实现循迹,及地点的判定。机器人在遇到障碍的时候,语音功能会发挥作用,避免与行人相撞,碰倒携带的药品。实验证明,本文的设计在一定程度上能够避免药品的倾倒。在自动倾倒垃圾这一部分,利用电磁铁使装垃圾的箱子转轴处往下滑动实现倾倒。
5 结语
本项目中的机器人,通过驱动麦克纳姆轮,实现前后左右无转矩变化方向,在相对狭小的施展空间也能灵活运转,降低对空间大小的需求。四轮均配有精密编码器,实现速度闭环控制,提高了精度与安全性。另外,小车能够自主充电,电量不足时转为待机状态,自动行进至充电区域进行充电,并且提前通知医务人员来处理机器人正在进行的工作。当配以更高的优先级时,小车将完全独立,还能走出输液厅在其他场所发挥作用。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
内燃机与配件(2022年2期)2022-01-17
幼儿教育·父母孩子版(2019年5期)2019-10-18
文苑(2018年22期)2018-11-19
新高考·高一物理(2016年11期)2017-07-07
电脑知识与技术(2017年5期)2017-04-08
新少年(2017年1期)2017-03-15
电脑知识与技术(2016年17期)2016-07-23
新高考·高一物理(2016年1期)2016-03-05
无线互联科技(2015年6期)2016-03-05