基于飞行安全的机场净空障碍物测量
2021-12-02 08:19梁艳艳伍州成
科学技术创新 2021年32期
梁艳艳 张 源 伍州成
(湛江市规划勘测设计院,广东 湛江 524000)
本文测量的机场位于两县级市的交界处,项目一期建设一条长3200 米、宽45 米跑道和一条等长平行滑行道。基于对飞行程序设计和飞行安全的考虑,在该项目投入运营前,必须对该跑道进行障碍物测量,提供准确的障碍物点位坐标并绘制障碍物分布影像图,保障机场跑道的飞行安全,并按时投入运营。
按照传统作业模式,需采用地毯式排查的方法对测区超高障碍物进行标记与量测,这种方法会消耗大量的时间和人力,且常会因为判断错误导致重复工作。本文从对超高障碍物的认定出发,明确障碍物的特征点,综合运用航空摄影测量和全野外数字化测量的方法获取障碍物的平面位置和高程。
1 机场净空障碍物测量的范围与目标
根据《民用机场飞行区技术标准(MH 5001-2013)》和ICAO附件14 中的相关规定,通过一系列障碍物限制面,限制了物体超出空域的界限范围。本文测量的机场限制面包含了进近面、起飞爬升面、锥型面、内水平面、过渡面和跑道升降带,如图1 所示。除跑道升降带和内水平面为水平面外,其余限制面均为坡度上升面或者是坡度上升面与水平面相结合的限制面[1]。因此,不同限制面对障碍物的限高要求也随着坡度的变化而变化。
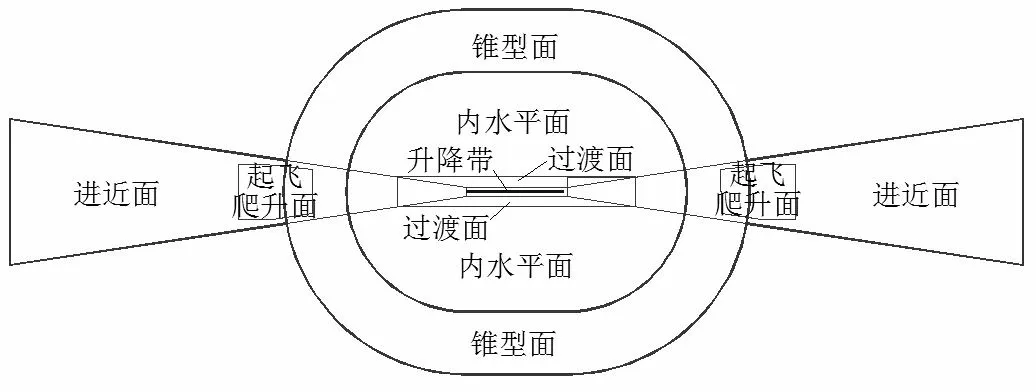
图1 机场限制面示意图
根据设计要求,机场起算基准标高按跑道两端入口中点标高平均值计算;内水平面测量高于机场基准标高45 米以上的障碍物;锥型面以内水平面外侧边缘为起点,按5%的坡度向上向外延伸,按坡度测量高于机场标高45 米至100 米的障碍物;进近面和起飞爬升面起始端距跑道两端入口60 米,约按2%的坡度向上向外延伸;过渡面以升降带长边和部分进近面侧边为起点,约按14%的坡度向上向外延伸,直到与内水平面相交;进近面、起飞爬升面和过渡面都需根据其坡度计算与机场起算基准标高的高差,从而得出障碍物限高。
除了对限制面内约200 平方公里的范围进行超高障碍物测量外,还需对机场跑道入口两端各30 公里和跑道两侧各15 公里,即在扣除限制面内之后约1600 平方公里的区域内,测量高于机场标高150 米且高于地面标高30 米的障碍物。该区域范围大,障碍物的分布和类型具有不确定性,给测量作业带来很大的困难。
2 障碍物测量分析认定
经前期调研和分析,测区机场净空区障碍物类型包含了房屋、山体、水塔、电信通讯发射塔、电杆(塔)、灯杆、树木等主体,同时还包括避雷针、天线、排气管、烟囱等附属设施。对障碍物认定过程中,对障碍物特征点的测量做出了以下规定:
2.1 对于不含附属设施的障碍物主体,应以障碍物主体的最高处为最高点;对于含附属设施的障碍物主体,应以附属设施的最高处为最高点。
2.2 若障碍物主体和附属设施都超出限高,则两者都需测量其最高处。
2.3 所有障碍物都以最高处的点位来表达,包括其经纬度坐标和高程;若障碍物最高处为一平面,则以该平面上离机场最近点的点位来表达。
3 机场净空障碍物测量技术方法
3.1 资料准备
3.1.1 测区1:10000 地形图:主要用于分析测区地形起伏情况,大致划定高度可能超限的区域。
3.1.2 测区航摄影像:该影像为2019 年9 月用大型运输飞机搭载DMC 和SWDC-4 航摄仪拍摄的立体航摄影像,地面分辨率优于20 厘米。
3.2 空间基准与精度要求
3.2.1 坐标系统
平面坐标系统采用2000 国家大地坐标系,高程系统采用1985 国家高程基准,投影类型采用统一3° 高带高斯克吕格投影,中央子午线经度为111° 。
3.2.2 精度要求
符合国家基本比例尺1:2000 地形图测量精度要求,地物点相对于邻近控制点的点位中误差不得大于0.2m;相对于邻近控制点的高程中误差不得大于0.15m。
3.3 测量方法
本次障碍物测量充分利用了测区航摄影像构建的立体模型对障碍物进行初步筛选,同时,结合1:10000 地形图、野外调绘资料和电塔、通讯塔等建设方相关资料,测区内绝大多数障碍物都能够被采集,最后通过外业核查兼并巡查的方式,保证测区障碍物无一遗漏。具体流程如图2 所示。

图2 项目技术路线图
3.3.1 像片控制点布设与测量
像片控制点是航测内业加密和测图的依据,可分为平高点和高程点。每个摄区划分为一个区域网来实施空三加密,区域网之间的像片控制点应尽量选择在上、下航线重叠的中间,相邻区域网尽量公用。本项目以航空摄影获得的立体影像为基础,共布设了59 个像控点,如图3 所示。像片上至少选刺2 个点进行测量,检查点选在航线中间,满足6 张航片重叠的位置。

图3 像控点布设
像控点布设在周围无遮挡、影像清晰、地物特征明显,且电磁辐射影响较小的区域。除此以外还需遵循以下原则:(1)区域网布点时,除山区、水域等无明显地物点的区域外,应保证每张像片都有控制点;(2)同一航线上,每隔4-5 张像片(实地距离约450 米)布设控制点;(3)每条航线和航线两端均需布设控制点,航线点位应与相邻航线错开2-3 张像片,保证每张影像上有控制点,不同架次间需有公共控制点。
本测区像片控制点采用CORS 网络RTK 技术施测,利用区域似大地水准面数据计算像控点高程。联测测区内的高等级控制点或重复点,以提高成果的可靠性;像控点联测结束后的坐标应及时展点检查,以防出现粗差,确保下一步空中三角测量能够顺利进行。
3.3.2 空中三角测量与模型定向
空中三角测量是摄影测量中通过连续摄取具有一定重叠的航摄像片,利用少量的地面控制点,在室内进行控制点加密,计算一个测区内所有影像的外方位元素和所有加密点的地面坐标[2]。为了消除视差,通过相对定向建立左右像片摄站间的空间位置和姿态参数的相对关系,再通过绝对定向利用控制点数据建立像片坐标和地面坐标间的数学转换关系[3]。
空中三角测量与模型定向的工作流程如下:
(1)整理测区基础数据:相机文件、航空影像和像控点成果等,建立测区目录。
(2)制作影像金字塔,设置模型参数,用全数字化摄影测量系统VirtuoZo 实现自动内定向,消除像片本身存在的几何畸变。
(3)每张航片至少选取3 个标准点位,加密区内航线间选取航线拼接点,为了提高加密成果的精度,人工手动调整有视差的点位,替换不合理的标准点位,进行模型相对定向。
(4)刺相控点,通过对立体模型进行平移、旋转和缩放,使立体模型纳入地面坐标系统,完成模型绝对定向。
(5)添加模型连接点,进行区域网平差解算,手动剔除粗差点,修测连接点,直到符合规范要求,生成加密点文件。在完成加密测区与相邻测区接边后,输出最后空中三角测量加密成果。
3.3.3 构建模型采集超高点
导入空三测量成果,在相对定向和绝对定向中误差满足设计要求的基础上,设置定向模型参数,自动创建立体模型。根据机场净空限制面内外要求的不同限制高度,在全数字化摄影测量系统VirtuoZo 中运用手轮切准待测区域内超高障碍物特征点,获取该点的空间坐标、高程及障碍物名称。
3.3.4 外业实地核查超高障碍物
外业核查主要是核对超高障碍物的空间坐标、高程和名称的正确性,并巡查障碍物的新增和变化情况。内业共采集了约518 个障碍物超高点,如图4 所示。由于机场周边限制要求高,这些超高点主要分布在机场限制面范围内,其中过渡面和内水平面的超高障碍物相对较多,锥型面和起飞爬升面的超高障碍物相对较少,限制面外成零星分布状态。外业需对这650 个超高点逐一核查,针对障碍物的不同特征采取了不同测量方法:

图4 内业采集的超高点分布图
(1)RTK 直接测量
对于房屋顶、楼梯间、女儿墙、水箱顶等特征点明显且可以到达的障碍物,可采用RTK 直接测量获取平面位置及高程值。
(2)角度偏心测量
对于一些高度较高、反射面较小、垂直度较好,且难以到达的障碍物,如:避雷针、天线、塔顶、灯杆、树木顶等,采用了全站仪角度偏心测量的方法,即将反射棱镜安置在待测点相关的某处,间接的测定出待测点的平面位置和高程[4]。如测量树冠顶部的位置和高度,首先将棱镜安置于树干底部边缘,瞄准棱镜测量,再转动照准部对准树冠顶部,根据旋转的角度,全站仪可计算树冠顶部的高程。如图5 所示。

图5 角度偏心测量示意图
4 障碍物测量成果
通过外业实地核查,排查了主体与附属设施重复点,现状拆除点,现状新增点和其他已变化的点位,最终找出所有超出限制要求的机场净空障碍物共计379 个。其成果包含了障碍物序号、名称、地点(所在村级行政区)、平面坐标、经纬度、高程、现场照片和障碍物分布影像图,这些成果可为民航局关于机场净空超高障碍物拆降工作提供作业依据,保障航空飞行安全。
结束语
通过前期对障碍物的分析认定,运用合理的测量技术,在减少外业测量工作的基础上,获得了符合精度要求的数据成果,这对机场飞行程序设计和飞行安全具有重要意义。本次障碍物测量的范围较广,种类较齐全,测量中充分利用了已有资料,综合运用航空摄影测量和全野外数字化采集测量技术,为将来类似障碍物测量的开展提供借鉴。
猜你喜欢
科技创新与品牌(2022年4期)2022-05-08
全球定位系统(2022年1期)2022-04-14
科技信息·学术版(2022年3期)2022-02-21
全球定位系统(2021年1期)2021-03-26
思维与智慧·下半月(2021年3期)2021-03-25
建材发展导向(2021年2期)2021-03-02
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
西部资源(2018年1期)2018-11-01