面向高等级自动驾驶的车路协同关键技术
2021-12-14 08:38王鲲张珠华杨凡胡星周谷越
移动通信 2021年6期
王鲲,张珠华,杨凡,胡星,周谷越
(1.北京百度智行科技有限公司,北京 100193;2.清华大学人工智能产业研究院,北京 100084)
0 引言
自动驾驶有单车智能自动驾驶(AD,Autonomous Driving)和车路协同自动驾驶(VICAD,Vehicle-Infrastructure Cooperated Autonomous Driving)两条技术路线。其中AD 主要依靠车辆自身的视觉、毫米波雷达和激光雷达等传感器、计算单元、线控系统进行环境感知、计算决策和控制执行;VICAD 则是在单车智能自动驾驶的基础上,通过车联网将“人-车-路-云”交通参与要素有机地联系在一起,助力自动驾驶车辆在环境感知、计算决策和控制执行等方面的能力升级,加速自动驾驶应用成熟。各国都在加快车路协同自动驾驶的技术研究和产业化,比如欧洲的ERTRAC[1]、美国CARMA[2]等机构。
VICAD 是一个循序渐进由低到高的发展过程,可以分为三个大的发展阶段(参考中国公路学会[3]、清华大学智能产业研究院[4]相关报告中对阶段的划分):
(1)阶段1:信息交互协同,实现车辆与道路的信息交互与共享;
(2)阶段2:协同感知,在阶段1 的基础上,发挥路侧的感知定位优势,与车辆进行协同感知定位;
(3)阶段3:在阶段1 和阶段2 的基础上,车辆与道路可实现协同决策与控制功能,能够保证车辆在所有道路环境下都能实现高等级自动驾驶。
我国VICAD 研究和发展迅速,I 阶段VICAD 已在多个城市开展规模性测试验证和先导示范,并逐步开展商业化运营先行先试;II 阶段VICAD 也在部分城市开展了建设部署和测试试验,道路的协同感知能力得到了大量验证,部分场景下基础设施的协调和控制也得到了探索。但总体而言,II 阶段VICAD 目前还不足以支撑高等级自动驾驶规模商业化落地,原因主要体现在:1)路侧协同感知定位能力有待进一步提高,尤其是需要从功能安全和预期功能安全(SOTIF,Safety of The Intended Functionality)的角度全面提高设备和系统的精确性、稳定性、数据可靠性等,以满足高等级自动驾驶车辆的需求;2)需要更加高效、经济的C-V2X 通信技术方案,解决全域、全量、多车间协同数据传输问题;3)车路协同决策与协同控制还缺乏有效的模型和方案,需要进一步探索和验证。
鉴于此,需要针对车路协同自动驾驶开展进一步深入研究,包括面向高等级自动驾驶的应用场景、车路协同系统等内容。
1 面向高等级自动驾驶的车路协同应用场景
根据SAE 3016[5]和GB/T 40429[6]标准,自动驾驶等级分为从L0 到L5 共6 个级别,其中L3 及以上等级规定:“当使用自动驾驶功能,无需驾驶汽车”。基于国内已经发布的车路协同自动驾驶应用场景国内标准如T/CSAE 53[7]、T/CSAE 156[8]、T/CSAE 157[9]、T/CSAE 158[10],国外标准如SAE J2735[11]、3GPP TS22.186[12]、TR22.886[13],本文将面向L3 及以上高等级自动驾驶的车路协同应用场景分为全量高精度协同感知与协同决策控制两大类,如表1 所示。

表1 面向高等级自动驾驶的车路协同典型应用场景举例
1.1 全量高精度协同感知类场景
(1)交通参与者协同感知
单车智能自动驾驶车辆(AV,Autonomous Vehicle)受限于传感器的感知距离、感知角度、感知时长等因素,较难对动静态盲区/ 遮挡、超视距等场景的交通参与者进行准确识别、定位和预测。通过路侧多传感器部署和路侧融合感知定位,可实现多方位、长距离连续检测识别,并利用V2X 技术将路侧感知结果共享发送到网联自动驾驶车辆(CAV,Connected Autonomous Vehicle),与主车感知进行融合,辅助自动驾驶车辆对盲区和超视距范围内车辆或行人的准确感知识别,CAV 车辆可提前做出预判和决策控制,避免急刹或出现交通事故。
以下以动静态盲区/遮挡协同感知、超视距协同感知、路边低速车辆检测典型场景为例,分别进行介绍。
1)静态盲区协同感知
AV 车辆经常会被建构筑物、树木、绿化带、静止车辆等遮挡,造成静态盲区,容易出现急刹或者交通事故。以路边行人闯入场景为例(如图1 所示),CAV 车辆通过车路协同感知,可以提前获取盲区内车辆、非机动车或行人的运动情况,避免了车辆急刹或事故的风险。
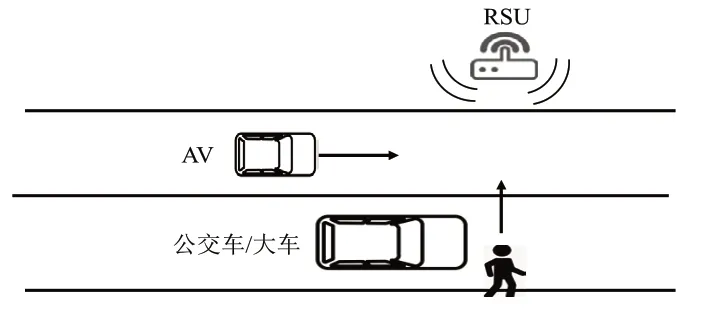
图1 静态盲区协同感知
2)动态盲区协同感知
AV 主车在路口左转或掉头时,容易被大卡车或公交车遮挡产生动态盲区,AV 无法识别被遮挡的车辆、行人或障碍物。通过车路协同感知,CAV 主车可以从路侧获取盲区内交通参与者的运动情况,避免了车辆急刹或事故的风险,如图2 所示。
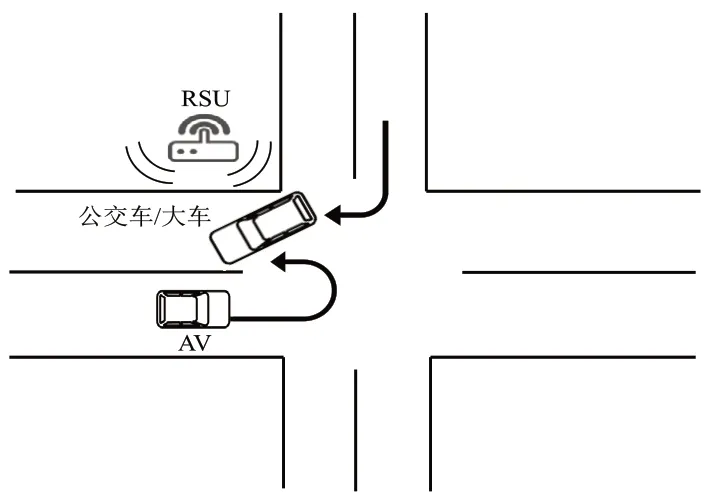
图2 动态盲区协同感知
3)超视距协同感知
AV 主车很难对较远处的障碍物进行稳定检测,容易造成急刹和事故的风险。以超视距障碍物场景为例,如图3 所示,通过车路协同感知,在很远距离时,路侧感知就可以将感知到的障碍物信息提前发送给车辆,避免了车辆出现急刹或事故的风险。
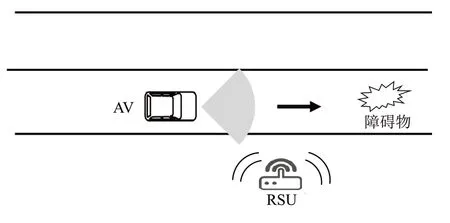
图3 车辆超视距协同感知
(2)交通事件协同感知
AV 在通过“死车”和“排队”等典型场景时往往难度较大,通过车路协同感知可以辅助自动驾驶车辆顺利应对这些场景。
1)“死车”场景
AV 主车前方有大车“死车”并停占两个车道时,后方AV 主车无法判断前方交通运行状况而停滞不前。通过车路协同感知,可以长时间对道路车辆进行跟踪和预测,及时将“死车”事件播发给CAV 主车,AV 主车可以及时做出变道等决策。如图4 所示。
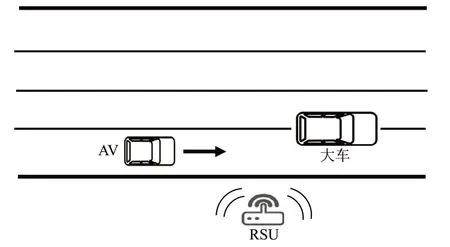
图4 违章停车、“死车”等交通事件场景
2)“排队”场景
跟车状态下,前方路口红灯,直行车辆出现排队现象;而AV 主车此时因为无法判断前车停止原因(排队中),因此会选择往左侧(左转车道)并线超车;然而临近路口时,却因为车道中的排队车辆而无法再并线回原车道。通过车路协同感知,及时发现前方排队事件,并将排队事件及时发送给CAV 主车,CAV 主车根据排队信息做出不变道超车并在车道内排队等候的决策。如图5 所示。
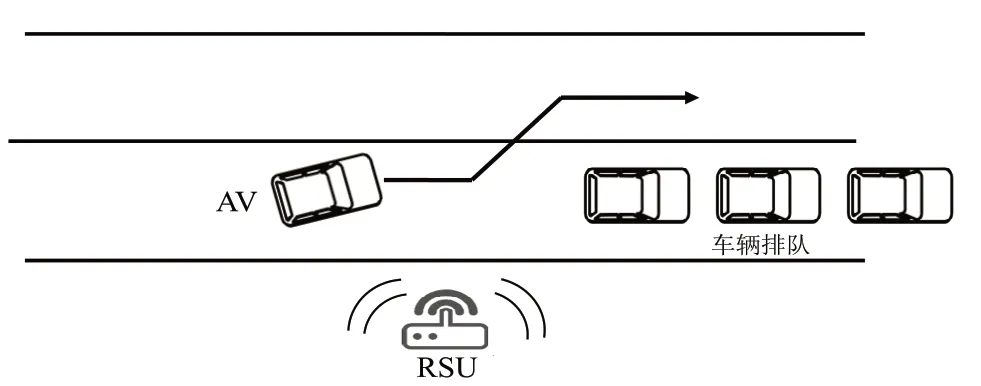
图5 排队交通事件场景
(3)信号灯协同感知
信号灯数据获取是自动驾驶必须解决的问题,单车智能主要通过视觉智能获取,但仍存在很多不足:
1)识别信号灯能力有限,异形信号灯无法识别。
2)车端视角限制,容易被前车遮挡。
3)容易受外界环境限制,尤其是逆光、雾天、扬尘、夜晚等环境。
4)识别的数据维度有限,倒计时信息识别不准。
车路协同自动驾驶信号灯协同感知主要是通过物联网信号灯数据接入、路侧多视觉融合感知等技术获取信号灯灯色和倒计时信息,经数据融合处理后,通过车路协同技术发给自动驾驶车辆。车路协同自动驾驶信号灯协同感知的优势:
1)获取方式不受灯的外观、环境影响。
2)获取到的数据内容丰富(包括灯色、倒计时)。
3)车辆可在很远的距离提前获取信息,提前进行决策控制。
以路口前方大车遮挡信号灯场景为例,可通过车路协同自动驾驶信号灯协同感知实时获取准确的路口信号灯灯色和倒计时数据,并通过V2X 将信号灯数据发送给路口所有车辆,以便车辆提前做出预判和决策控制,避免出现闯红灯或者急刹。如图6 所示。

图6 路侧信号灯融合感知
1.2 协同决策控制类场景
在车路协同感知的基础上,路测设施或系统还可进一步具备协同决策或协同控制的能力,进一步保障自动驾驶安全,提高交通通行效率。以下以远程驾驶、自主泊车和无信号灯协调通行场景为例进行介绍。
(1)远程驾驶
基于车路协同实现远程的应用场景,以具体的车辆脱困(EV-1(CAV 车辆)受周边车辆影响停止运行,依靠路侧协同帮助主车“脱困”)为例,实现逻辑与过程如图7 所示。
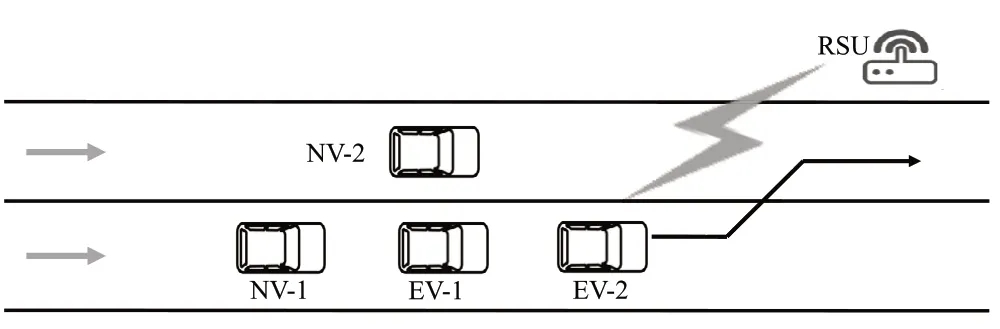
图7 远程驾驶场景
1)EV-1(CAV 车辆车辆)在道路上行驶。
2)行驶过程中由于周边车辆EV-2、NV-1 及NV-2的阻挡,导致EV-1(自动驾驶车辆)停止运行。
3)EV-1 向路侧系统发送请求路侧协同决策与控制信息,路侧系统生成决策规划和控制信息,EV-2 按照路侧生成的决策规划信息运行,给受困车辆EV-1(自动驾驶车辆)让行。
(2)自主泊车
基于车路协同实现自助泊车的应用场景,实现逻辑与过程如图8 所示。
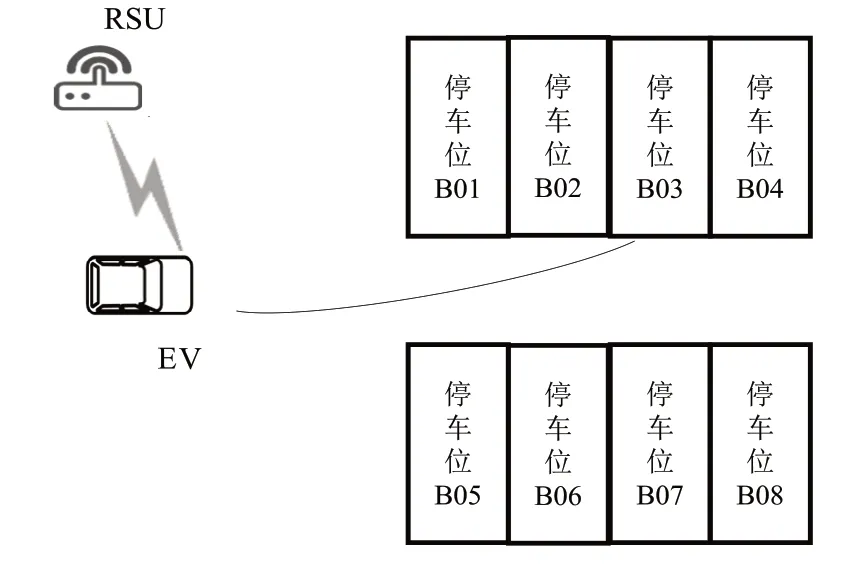
图8 车路协同自主泊车场景
1)CAV 行驶至停车场,向路侧系统发送请求路侧协同规划请求(自主泊车接管)信息、自车信息。
2)路侧系统根据接收到的协同规划请求(自主泊车接管)信息和自车信息,确定停车场内目标停车位。
3)路侧向车辆发送决策规划消息,控制车辆停入停车位。
(3)无信号灯交叉口协调通行
该场景的实现逻辑与过程如下:
1)CAV 从远处驶向交叉路口。
2)路侧系统感知识别全局路况信息,可以针对不同的车道进行决策规划,包括给不同的车道规划行驶路径等规划消息,数据内容包括不同的路权以及相应的路权下的开始时间及结束判断时间。如图9 所示,路侧系统针对车道级通行控制时,车辆EV-1 和EV-2 所处车道被分配一级通行权,车辆EV-3 和EV-4 所处车道被分配二级通行权。
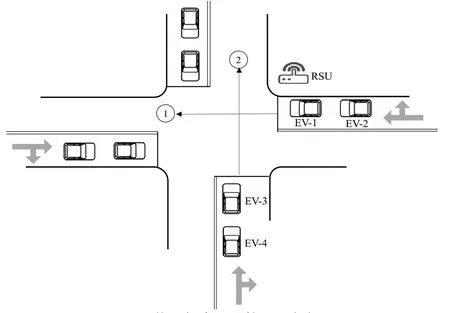
图9 无信号灯交叉口协调通行场景
3)CAV 通过OBU 接收路侧系统的决策规划信息,不同车道上的CAV 根据路侧系统发送来的决策规划信息(包括路权等级及对应的开始和结束时间)获得车辆所归属车道的路权及可通行的时间并按照规则通行。
2 面向高等级自动驾驶的车路协同系统
2.1 总体架构
基于GB/T 30124.1[14]定义的合作式智能运输系统,服务于车路协同自动驾驶的车路协同系统总体架构如图10 所示,包括四个主要部分:

图10 车路协同系统总体框架
(1)出行者子系统:由出行者所携带的各类信息终端或其它信息处理设备构成。
(2)车载子系统:包括OBU,也可以包括车载计算控制模块、车载网关、路由器等。
(3)路侧子系统:包括路侧通信设施、路侧感知设施、路侧计算设施等,也包括用于交通安全、交通管理、通信与定位的各类设备设施。
(4)中心子系统:包括云控平台和相关第三方应用服务平台,提供中心解密、中心交换、服务组件节点、服务路由器和中心接入节点等服务,具备网络管理、业务支撑和服务等能力。
2.2 系统功能与性能要求
面向高等级自动驾驶的车路协同应用场景对车路协同系统的技术需求主要体现在感知定位能力、C-V2X 通信能力、决策控制能力三个方面。
(1)C-V2X 通信能力
综合来看,与行业已经发布的面向辅助驾驶的T/CSAE 53、T/CSAE 157 相关标准相比,面向高等级自动驾驶的车路协同应用场景对C-V2X 通信具有更高要求,如表3 所示,分别针对协同感知类场景和协同决策控制类场景提出了对C-V2X 的通信需求,其中最小端到端时延要求为3 ms,可靠性最高99.999%,直通链路数据速率最大为1 Gbit/s,上行数据速率最大为25 Mbit/s,负荷最大为12 000 byte,通信范围最大为1 000 m。
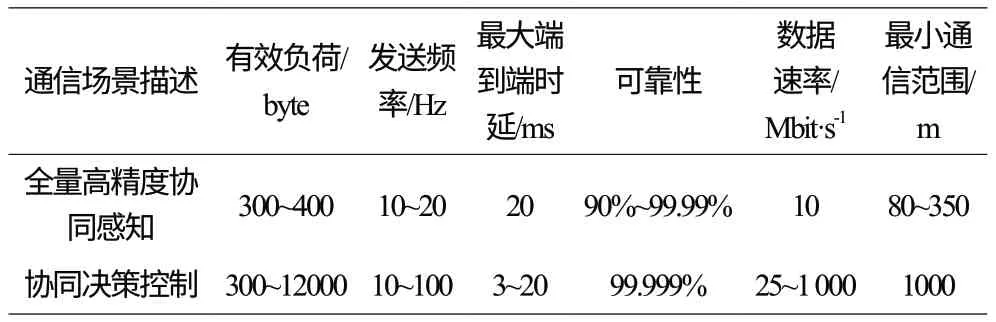
表3 车路协同系统C-V2X通信性能指标要求
(2)感知定位能力
车路协同系统的感知定位能力应与L3 及以上等级自动驾驶车辆对感知定位的要求相匹配,相关性能指标如表4 所示。
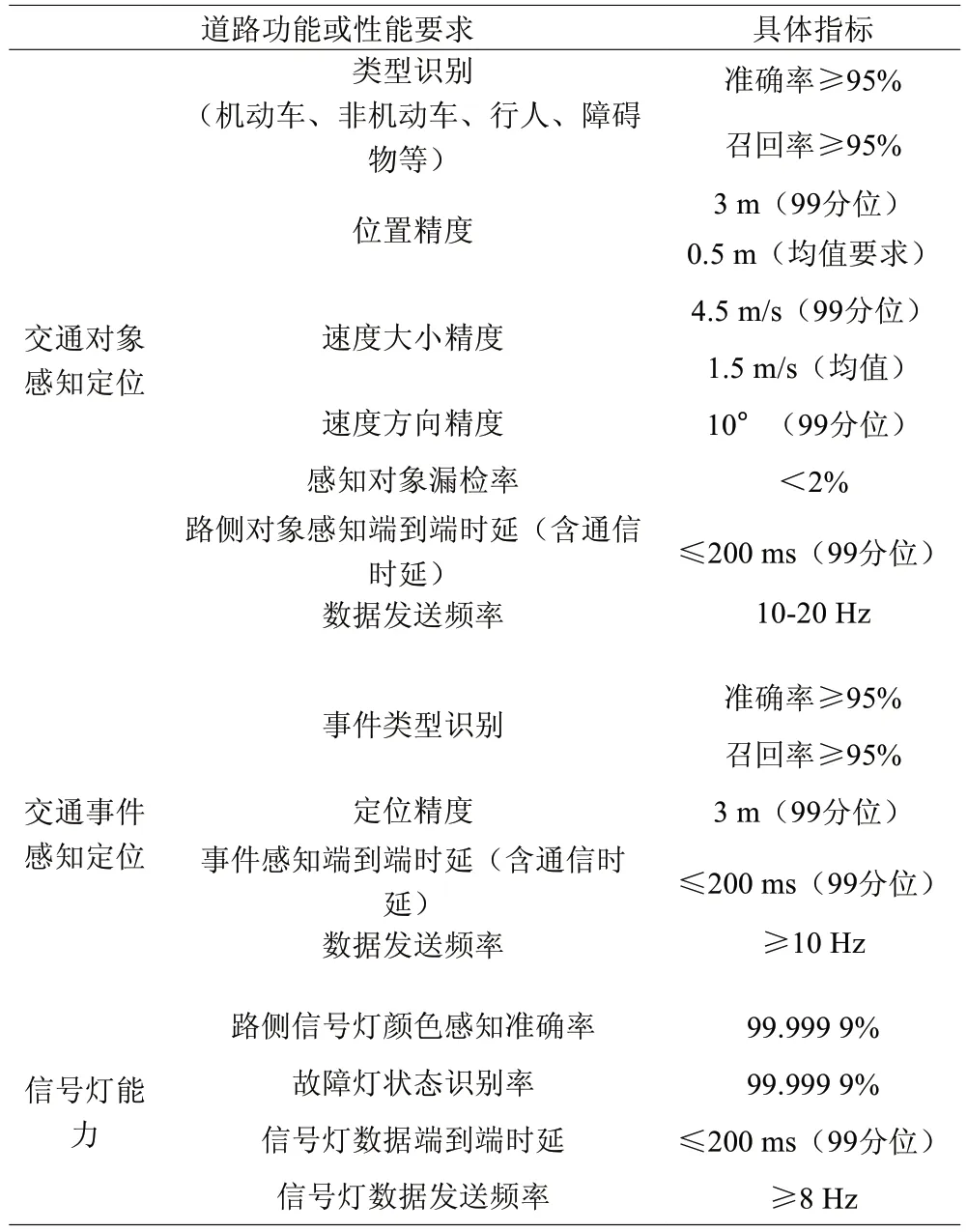
表4 车路协同系统融合感知定位性能指标要求
(3)决策控制能力
协同决策控制类场景需要车路协同系统具备相应的轨迹预测能力、决策规划能力和控制能力,这就要求在路侧同时部署一套与车端智能驾驶系统(车载OS 与车控OS)适配兼容的路侧智能驾驶系统(路侧OS),且路侧OS 需要更具开放兼容性,为不同类型、不同等级的车辆提供协同驾驶服务。
2.3 车路协同系统安全评价
(1)评价模型
Hayward 基于预期功能安全理论(SOTIF)提出的基于碰撞时间的车辆驾驶行为安全量化技术指标[15]受到行业内的普遍认可,该模型可用于分析车路协同自动驾驶的安全性,但往往只针对非智能车辆或处于理想工况的车路协同系统,在真实场景中,车辆容易受到极限场景(corner case)、恶劣天气等影响,使得传感器失效、算法失效、控制系统失效,造成理想仿真场景与实际交通场景存在较大差异,无法体现车路协同为单车智能提供冗余信息和互补信息的优势,因此,需要在传统安全模型框架的基础上,加入场景分布模型和车辆交互模型,得到一个更加接近真实场景的车路协同自动驾驶安全评价模型(VICADSRM),该模型的框架如图11 所示。
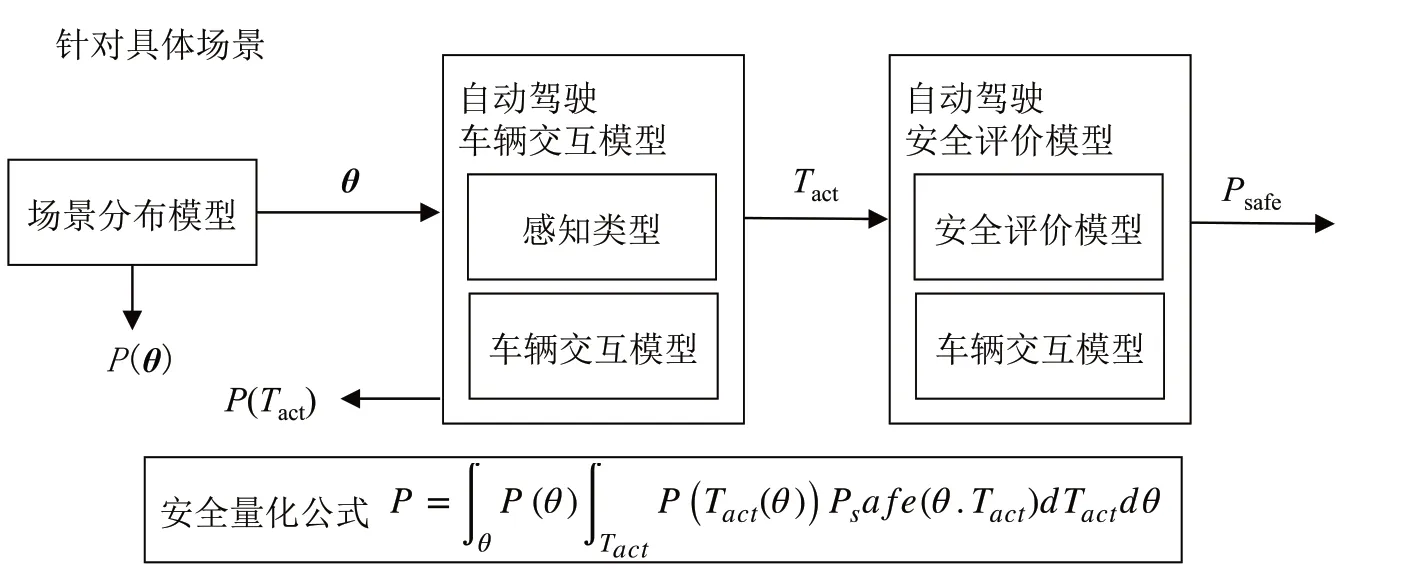
图11 VICADSRM理论模型框架
VICADSRM 有四个子模型组成,分别是:
1)场景分布子模型:车辆在不同驾驶场景,车速、车头时距、冲突距离等参数呈现出不同的分布,由大量实际交通数据统计得出,车速服从对数正态分布,在非路口条件下的车头时距服从负指数分布,在路口条件下冲突距离的倒数和左转车速服从泊松分布。
2)感知子模型:感知的不确定性是单车智能和车路协同产生驾驶安全差异的核心点,包括硬件检测的不确定性、软件模型的不确定性与多传感器融合的不确定性。对这类不确定性,可使用贝叶斯神经网络对感知模型进行误差表征与估计。
3)车辆交互子模型:针对超视距跟驰、换道冲突和无保护左转场景,分别使用了智能驾驶模型(IDM,Intelligent Driver Model)、三阶段车道变更模型和三阶段左转模型,实现仿真场景下的车辆交互。
4)安全评价子模型:为评价系统的安全性,引入基于时间和基于概率的安全评价指标。在时间维度,使用碰撞时间(TTC,Time to Collision)和抵达冲突点时间差ΔT作为安全评价指标;在概率维度,使用实际未发生碰撞的概率PSafe作为安全评价指标。
VICADSRM 模型中,超参数表征某类场景的具体状态分布,P(θ) 为某一组场景出现的概率;Tact则表示车辆发生感知、变道、路口转弯等关键动作的时间,P(Tact) 为执行该关键动作的概率;Psafe是在给定一组和Tact情况下,借助安全评价模型和车辆交互模型计算求得安全量化指标,进而通过积分可以得到该类场景下的平均安全理论指标P。
(2)评价方法与结果
为了对比车路协同与单车智能在自动驾驶安全方面的差异性,选择了超视距跟驰、换道冲突和无保护左转三个典型场景进行比较分析,基于百度Apollo 在实际交通运行环境中采集的大量数据,分别代入上述自动驾驶安全的理论模型框架中,计算在不同典型场景下的安全量化指标,并进行比较分析。
三个场景中关键指标的计算公示如表5 所示,其中超视距跟驰场景下的安全评价指标计算过程如下:
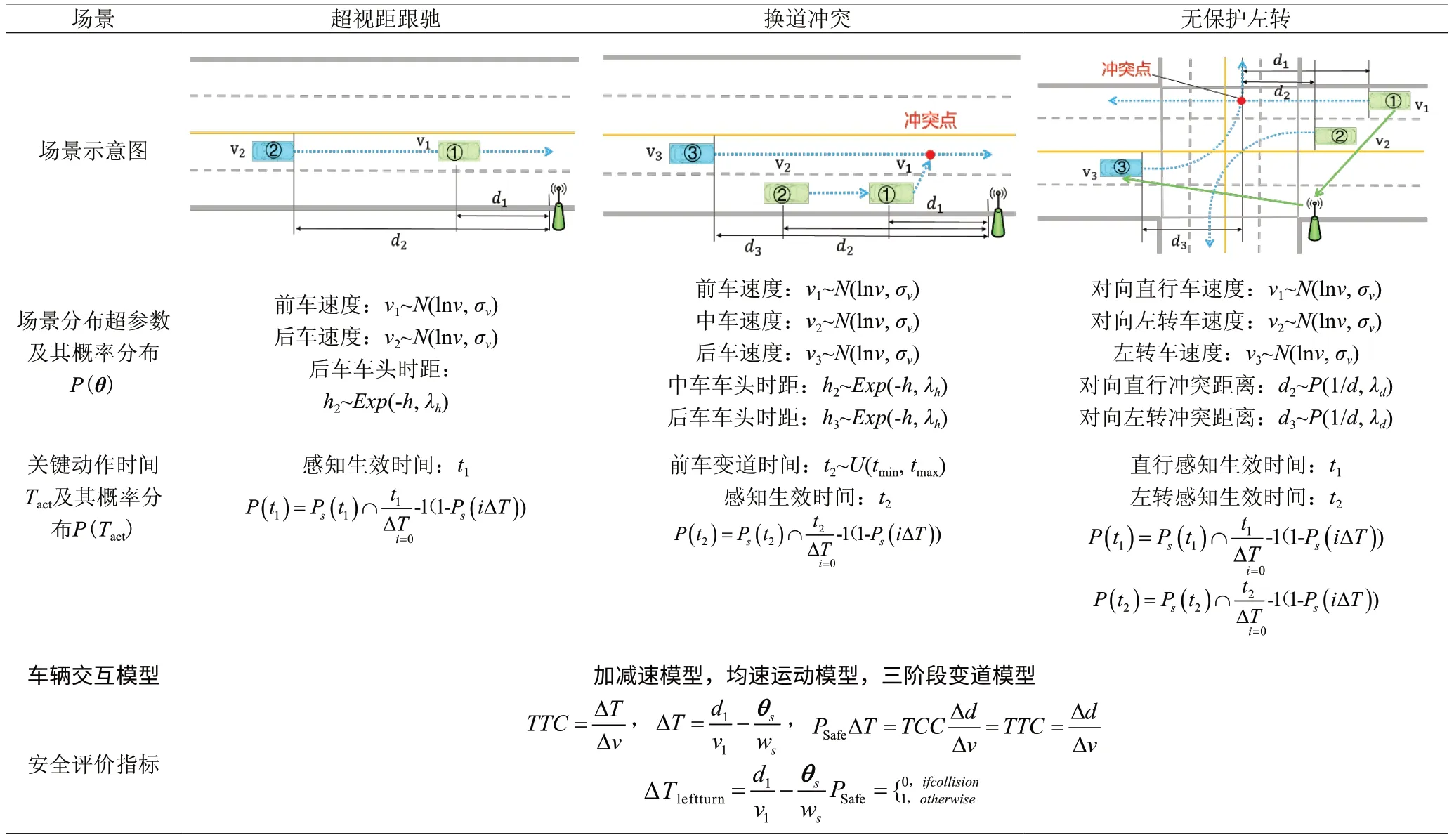
表5 三种典型场景下自动驾驶安全的理论计算方法
1)对场景分布的超参数θ={v1,v2,h2}进行离散采样,并计算该分布产生的概率P(θ)=P(v1)P(v2)P(h2)。
2)对关键动作时间t1进行离散采样,并通过感知模型PS计算关键动作发生在时间t1的概率P(t1),即在t1时刻前均未发生有效感知且在t1时刻发生有效感知的概率。
3)对于θ和t1计算量化的安全评价指标TTC、ΔT及PSafe,对P(θ)P(t1)PSafe(θ,t1) 进行积分得到安全评价指标的期望值。
基于百度Apollo 的实测数据,统计拟合出场景分布模型,并结合VICADSRM 模型,计算单车智能和车路协同在三种典型场景下的运动状态和安全评价指标,实验计算结果如表6 所示。经比较分析显示,车路协同能够显著提升自动驾驶安全性。

表6 三种典型场景下自动驾驶安全的理论计算结果
1)在时间评价维度:用TTC、TTC和ΔT作为基于时间的安全评价指标,车路协同对比单车智能,实现了0.04%、7.61% 和31.31% 的提升。
1)在概率评价维度:用事故率1-Psafe作为指标,车路协同相比单车智能在三种场景下分别降低38.94%、84.53%和90.75%。
2.4 应用示范情况
基于百度Apollo 的车路协同系统具有广泛用途,除服务于自动驾驶车辆外,还可应用于智能交通、智慧出行和智慧城市建设,目前车路协同系统已在北京、广州、上海、长沙等二十多个城市开展落地实践。
(1)车路协同自动驾驶
百度Apollo L4 级自动驾驶车辆的路测里程已经突破1 000 万公里,是全球唯一一家实现千万公里级路测积累的中国企业。Apollo 车路协同系统为Apollo Robotaxi、Robobus 等网联自动驾驶车辆在全国超过27 个城市的规模化测试运营提供网联支持,辅助自动驾驶车辆安全可靠运营,为乘客提供高质量体验服务,如图12 所示。

图12 Apollo车路协同系统应用
在辅助驾驶的基础上,百度Apollo 还进一步提出了Apollo Air 车路协同系统,其核心是在不使用车载传感器,仅依靠路侧轻量感知的前提下,实现连续覆盖感知(部署示意图见图13),并利用V2X、5G 等无线通信技术就可以实现车-路-云协同的L4 级自动驾驶。
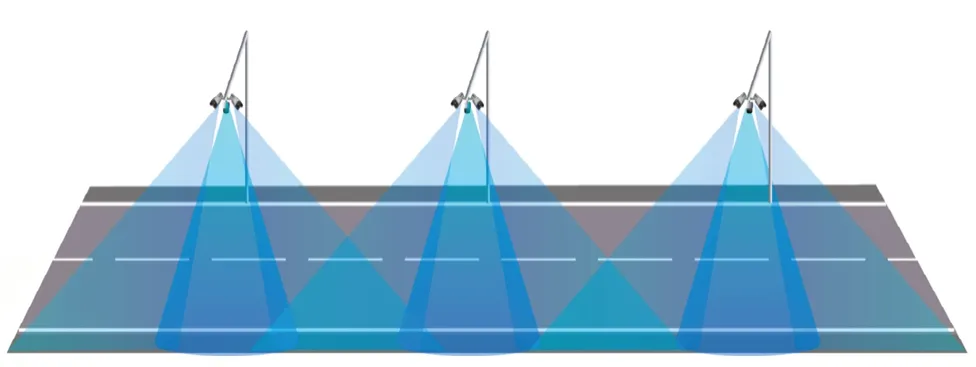
图13 Apollo Air全息道路感知部署示意图
(2)其他网联应用
依赖于百度Apollo 车路协同系统高精度感知能力、边缘计算能力与智能网联能力,不断探索开展更多车路协同和智能网联应用,比如将数据发送到Robobus/Robotaxi 车内的交互屏幕、Robobus 车尾屏上,后方车辆能看到红绿灯倒计时、交通事件播报、路口排队长度等交通信息。网联数据还可以发送到百度地图、度小镜等产品上,广大市民也能便捷获得电子围栏语音播报、信号灯信息、事件点视频的呈现等网联化服务。
3 结束语
本文简述了面向高等级自动驾驶车辆的车路协同应用场景需求,并对车路协同系统进行了系统分析,可以为下一阶段车路协同应用的发展和自动驾驶的规模商业化落地提供参考和解决思路。
但车路协同自动驾驶规模商业化落地是一个循序渐进、由局部到全面逐渐发展的过程:首先,需要实现关键技术进一步突破,如车路协同系统、车路高效通信(NRV2X)、云控平台等;其次,智能车辆的渗透率和智能道路覆盖率需要达到一定水平,实现车路协同系统的全面覆盖和广域服务;第三,需要在政策法规和技术标准方面提供足够的保障支持,比如高精度地图与定位、车联网数据安全等方面。
猜你喜欢
科学大众(2020年23期)2021-01-18
小学科学(学生版)(2019年3期)2019-03-30
汽车观察(2019年2期)2019-03-15
汽车观察(2019年2期)2019-03-15
小天使·一年级语数英综合(2018年6期)2018-06-22
中国交通信息化(2018年12期)2018-03-21
中国卫生(2016年5期)2016-11-12
华人时刊(2016年19期)2016-04-05
山西大同大学学报(自然科学版)(2015年1期)2015-01-22
生物进化(2014年2期)2014-04-16