
直流无刷电机的改进型滑模控制
2021-12-14 07:47曾俊杰
重庆理工大学学报(自然科学) 2021年11期
徐 鹏,曾俊杰,张 伟
(重庆理工大学 电气与电子工程学院, 重庆 400054)
直流无刷电机具有维护成本低、机械性能良好、起动转矩大、过载能力强、使用寿命长等一系列优点。自20世纪50年代以来,在各种驱动装置和伺服系统中被广泛使用[1]。但在一些高端产品中,电机控制芯片仍从国外进口,一些精确的控制算法仍参考国外理论。因此,有必要研究和发展高效、稳定、准确的电机控制算法理论[2-3]。在电机控制策略领域,常用的控制算法有传统的PID控制[4-5]、模糊控制[6-7]、滑模变结构控制[8-10]等算法。其中,滑模变结构控制本质上是一种特殊的非线性控制方法,它通过切换控制量来使得系统轨迹朝滑模面滑动,因此具有响应速度快、对数学模型物理参数变化和外界扰动不敏感等优点。其缺点是当状态轨迹到达设定的滑模面时,这种切换策略会造成在滑模面两侧来回运动,从而导致抖振现象[8]。该方法非常适用于直流无刷电机的控制,Yan等[11]提出了一种基于模糊滑模控制器的设计,有效削弱了抖振现象,控制系统具有较强的鲁棒性。汪俊杰等[12]将前馈控制与滑模控制结合成前馈滑模控制器,其具有传统滑模控制的简单性能,弥补了传统滑模控制器输出端积分环节响应速度慢的不足,提高了抗扰能力。焦晓雷等[13]阐述了一种全局滑模控制器,改善了传统滑模控制器系统参数的不确定性和外部干扰动态性能。 Zhang H等[14]在文献[2,9-13]基础上介绍了一种高阶滑模观测器与非奇异终端滑模,有效解决了快速终端滑模控制器出现的奇异问题。Naik B B等[15]对Buck变换器采用改进滑动函数的滑模控制策略,改善了系统的稳态和动态性能。
本文研究在滑模变结构控制算法基础上改进传统指数型趋近率,加大系统趋近滑模面平衡位置的控制力度,增强电机控制动态性能,并结合带积分修正函数的快速终端滑模面,加快系统的收敛速度,减少切换时间,使得系统运动点快速沿着设定的滑模面运动,从而在提高系统响应时间以及减少系统超调量的基础上解决了滑模控制所带来的抖振问题。
1 改进趋近率模控制器的设计
直流无刷电机的电压方程可表示为:
(1)
其中:Ua、Ub、Uc表示电机的三相电压;Ra、Rb、Rc表示电机的三相绕组电阻;ea、eb、ec表示电机的三相反电动势;ia、ib、ic表示电机的三相电流;La、Lb、Lc表示电机的三相绕组自感;Lab、Lac、Lba、Lbc、Lca、Lcb表示电机绕组间的互感;P为微分算子d/dt。
无刷直流电机转子的机械运动方程为:
(2)
其中:T为直流无刷负载转矩;J为电机转动惯量;B为电机黏滞摩擦因数。忽略黏滞摩擦因数的影响,将式(2)改进为:
(3)
则直流无刷电机的状态方程为:

(4)
式中:x1=ω*-ω;x2是x1的微分;电流i为控制量;转速误差为输入;电机转速为输出。
典型的转速电流双闭环直流无刷电机调速系统如图1所示。电流控制器采用结构简单、易于实现的PI算法。速度环采用改进趋近率滑模变结构控制算法。
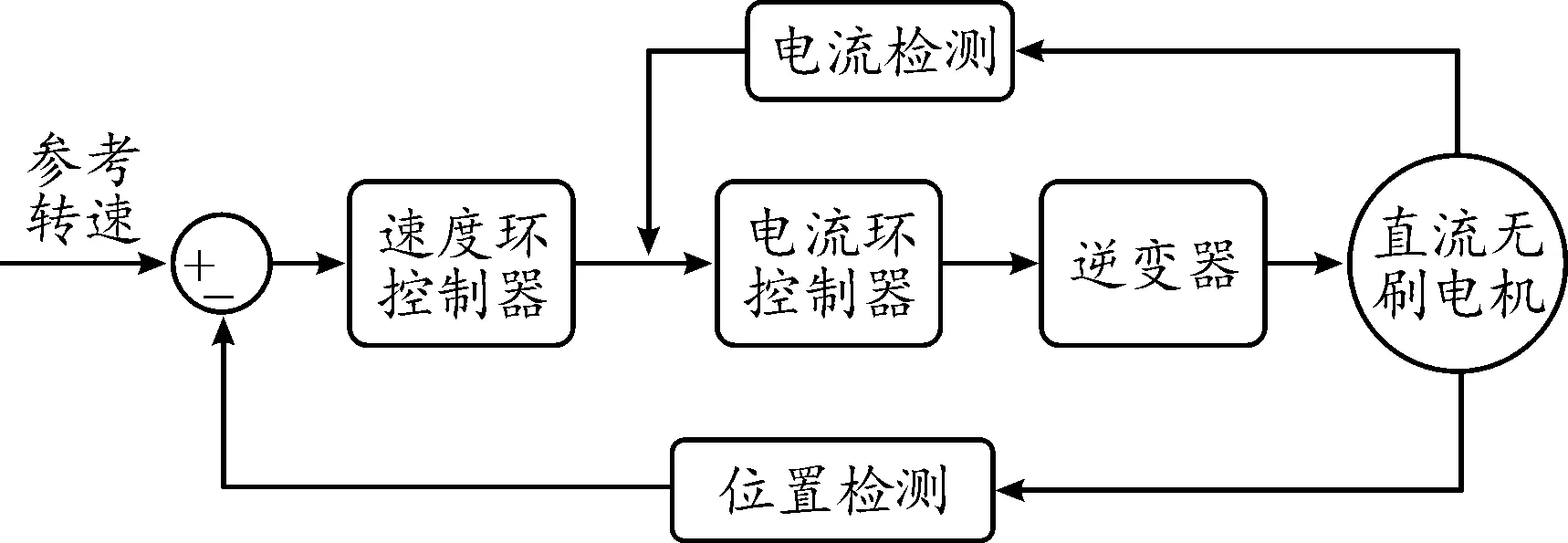
图1 直流无刷电机双闭环调速系统结构框图
取滑模面为:
s=Cx1+x2
(5)
基于对常规指数趋近率的分析,为了在更大程度上提升控制系统的动态稳定性能,增强鲁棒性,提出了一种改进型指数趋近率:
(6)
根据直流无刷电机的线性空间表达式和传统滑模面,以及改进型指数趋近律可得控制器为:
(7)
其中:β=3;S可取x1、x2或s=Cx1+x2,即S与状态变量关系密切。引入S后,趋于稳定的速度与状态变量紧密相关。S取x1时,将控制器命名为x1SMC;S取x2时,将控制器命名为x2SMC;S取s时,将控制器命名为sSMC。
S值与当前系统状态距离滑模面的距离相关。当S值较大时,系统状态会根据-ε|S|sgn(s)和-ks两种速率向滑动面趋近。与传统指数趋近率相比,由于增加了 |S|β项,改进型趋近率的趋近速度将会大幅度提升; 当系统状态接近滑模面,此时S值较小,-ks接近于0,而改进型趋近率-ε|S|sgn(s)起着主导作用,系统状态变量会很快接近于0并在原点附近稳定。这样有效减少了切换时间,提升了系统控制品质。
关于稳定性证明。选择李雅普诺夫函数为:
(8)
对式(5)求导,再将式(7)代入。根据式(9)的李雅普诺夫稳定性判据进行判定。

(9)
从式(10)中可以看出,无论S取何值,均有|S|≥0;又因为ε、k和β均恒大于 0,则式(10)恒成立。由稳定性判据可知,采用改进型指数趋近率的滑模控制系统是稳定的。
(10)
2 改进滑模面滑模控制器设计
2.1 快速终端改进型滑模变结构控制器设计
将快速终端滑模面定义为:

(11)
式中:x1为参考转速与实际转速的差值;x2为x1的导数。对式(11)进行求导:
(12)
取改进型指数趋近率为:
(13)
令式(12)等于式(13),可得控制器为:
(14)
2.2 带修正函数的快速终端改进型滑模变结构控制器设计
针对传统快速终端滑模控制存在抖振和收敛速度慢的问题,提出了带修正系数的滑模面。带修正系数的滑模面为:

(15)
其中r>0是标量。此处积分项用于实现闭合条件下电机转速的稳态性能更好。
趋近律为:
(16)
对式(15)进行求导可得:
(17)
令式(16)等于式(17),可得:

(18)
对于2阶非线性动态系统:

(19)
取带修正系数的快速终端滑模面为:
(20)
对带修正系数的快速终端滑模面求导可得:
(21)
则指数趋近律为:
(22)
根据式(19)(21)(22),可得带修正系数的快速终端滑模控制为:
(23)
关于稳定性分析。由于
(24)
则

(25)
由式(24)知ε>0,且 |x1|β≥0,则可得式(25)恒小于0,故所提出控制器稳定。
关于有限到达时间分析。设由s(0)≠0至s=0的时间为t1。当t=t1时,即s(t1)=0,且
(26)
(27)
即

(28)

(29)
设由x1(t1)≠0至x1(t2+t1)=0的时间为t2,在此阶段,s=0,即
(30)

(31)
对式(30)(31)进行积分,得
3 仿真结果和分析
采用Matlab/Simulink软件建立改进趋近率滑模控制与改进滑模面滑模控制的仿真模型。采用的电机参数见表1。

表1 直流无刷电机参数
3.1 改进趋近率控制器仿真结果和分析
将传统指数型滑模变结构控制与改进型的 3种滑模控制进行对比,仿真时长为0.2 s。将电机参考转速设置为1 500 r/min。初始时刻负载转矩为0 N·m,在0.1 s时施加3 N·m的负载转矩。
电机转速响应与电磁转矩响应如图2、3所示。从图2中可以看出,改进型趋近率(尤其是S取x1时)的趋近速度更加平滑,收敛过程的转速波动较小,转矩波动也较小,且在平衡位置时抖动最小。传统指数型趋近率滑模算法与3种改进型趋近率算法相比,转速、转矩响应曲线变化趋势相差不大,且在0.05 s时会重合,趋于稳定。

图2 传统指数型与改进型滑模变结构控制电机转速响应曲线
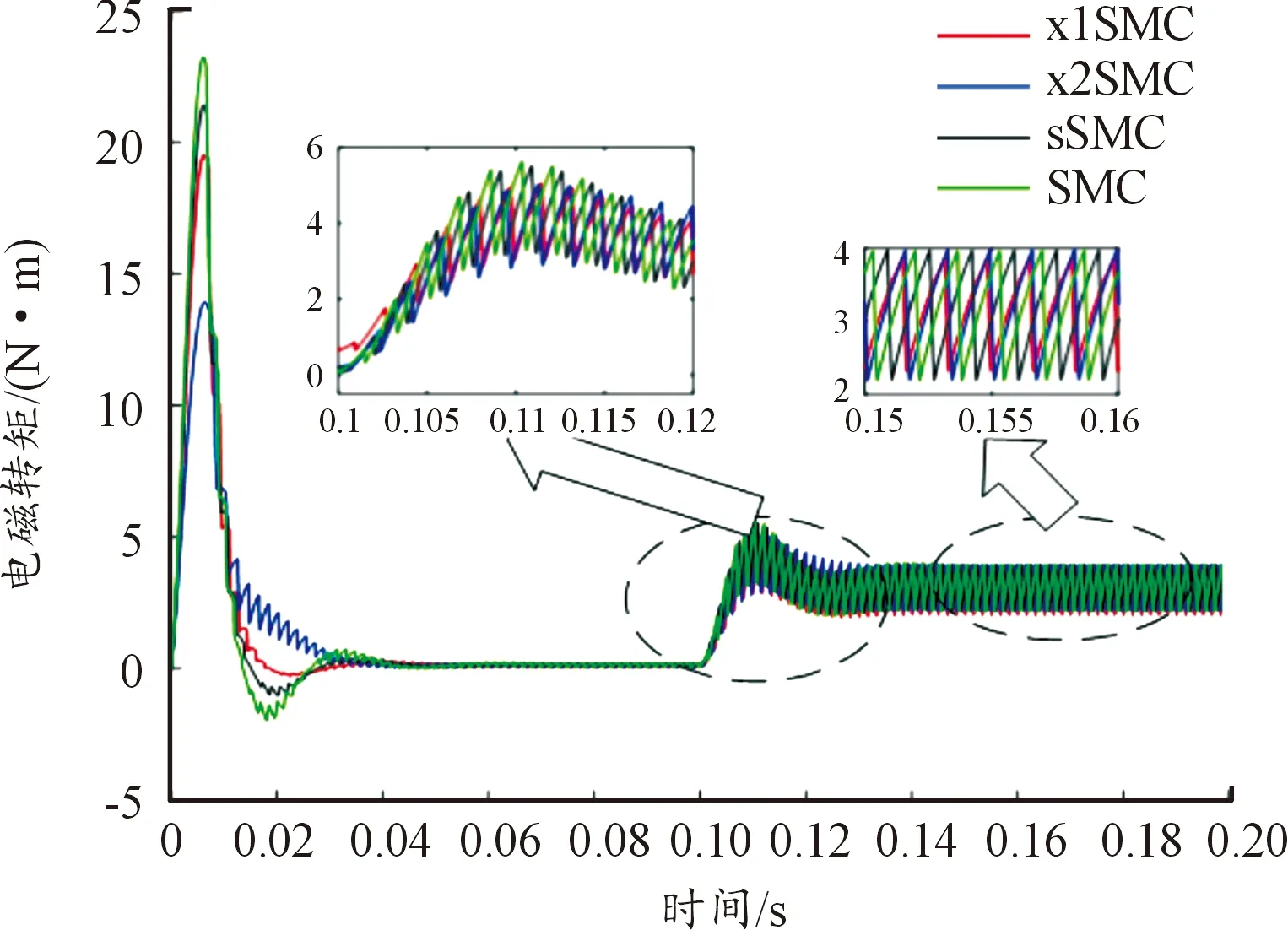
图3 传统指数型与改进型滑模变结构控制电磁转矩响应曲线
对图2、3进行详细对比分析,结果如表2所示。其中,x1SMC算法的转速在启动阶段会从0平滑过渡到平衡状态,且基本没有转速波动;趋于稳定的时间最短,虽然转矩最大波动和转速最大波动比x2SMC略大,但对系统整体影响不大。因此,x1SMC 控制算法的稳定性更优。但从图2、3中可以看出,这种改进指数型滑模控制算法,针对滑模抖振的问题并没有明显改善。

表2 改进型趋近率滑模算法的系统响应性能参数
3.2 改进滑模面控制器仿真结果和分析
使用带修正函数的快速终端改进型滑模变结构控制算法(即改进型滑模算法,简称ISMC)与快速终端改进型滑模变结构控制算法(FTSMC)、改进型指数趋近率滑模变结构控制算法(x1SMC)、传统指数型趋近率滑模变结构控制算法(SMC)进行对比,得到直流无刷电机调速系统的电机转速响应以及电磁转矩响应波形如图4、5所示。4种算法的转速、转矩响应曲线在接近 0.04 s 时重合,速度与转矩响应曲线变化趋势几乎一致。

图4 4种算法的电机转速响应曲线

图5 4种算法的电磁转矩响应曲线
对图4、5进行详细对比分析,结果如表3所示。综合上述4种算法的系统动态响应可知,ISMC算法与FTSMC算法在稳定时间的抖动问题方面得到了很大改善,且前者算法的抖动为0.4 r/min,几乎可忽略不记,且转速响应最大波动的最小范围在 1 500~1 502 r/min范围,几乎没有超调现象,到达参考转速时间最短,响应最快,转矩响应最大,转矩波动为14 N·m。相对于其他3种控制算法,ISMC在直流无刷电机控制系统中具有更好的应用优势。

表3 4种算法的系统响应性能参数
4 实验结果和分析
为验证所提出算法的可行性,建立基于STM32的直流无刷电机调速实验平台,如图6所示。控制系统以TI公司的STM32C8T6为控制芯片,实验平台还包括外围电路开关、电流采样模块、电源模块、通信模块、直流无刷电机等。

图6 直流无刷电机调速实验平台实物图
实验中,电流环采用结构简单的PI控制,速度环采用SMC、x1SMC、FTSMC以及ISMC。将电机的给定转速设置为 25 r/s(即1 500 r/min),使用以上4种控制算法得到不同的电机转速响应,如图7所示。
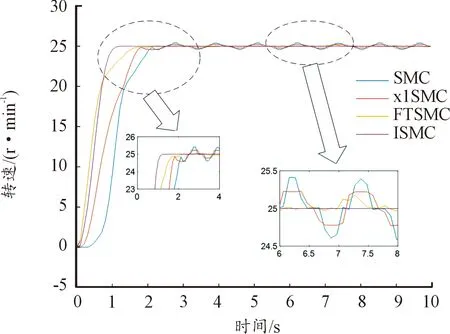
图7 传统滑模控制算法的电机转速响应曲线
从图7中可以看出,所提出的ISMC算法响应时间最快,几乎没有超调量;其他3种算法的抖动很明显,而ISMC算法到达参考转速的过程很平滑,几乎没有抖动。具体性能参数见表4。

表4 改进型趋近率滑模算法的系统响应性能参数
为了更好地验证所提出算法的性能,将这4种算法进行加减速实验对比分析。加速实验过程:从0加速到10 r/s,再加速到20 r/s,最后加速到30 r/s,如图8所示。直流无刷电机减速实验过程:从0上升到20 r/s,然后减速到15 r/s,最后减速到10 r/s,如图9所示。从图8的4种算法的加速实验和图9的4种算法的减速实验中可以看出,ISMC算法在响应时间和系统抖动方面都优于其他3种算法,加减速实验结果更加证明了所提出算法的优越性。
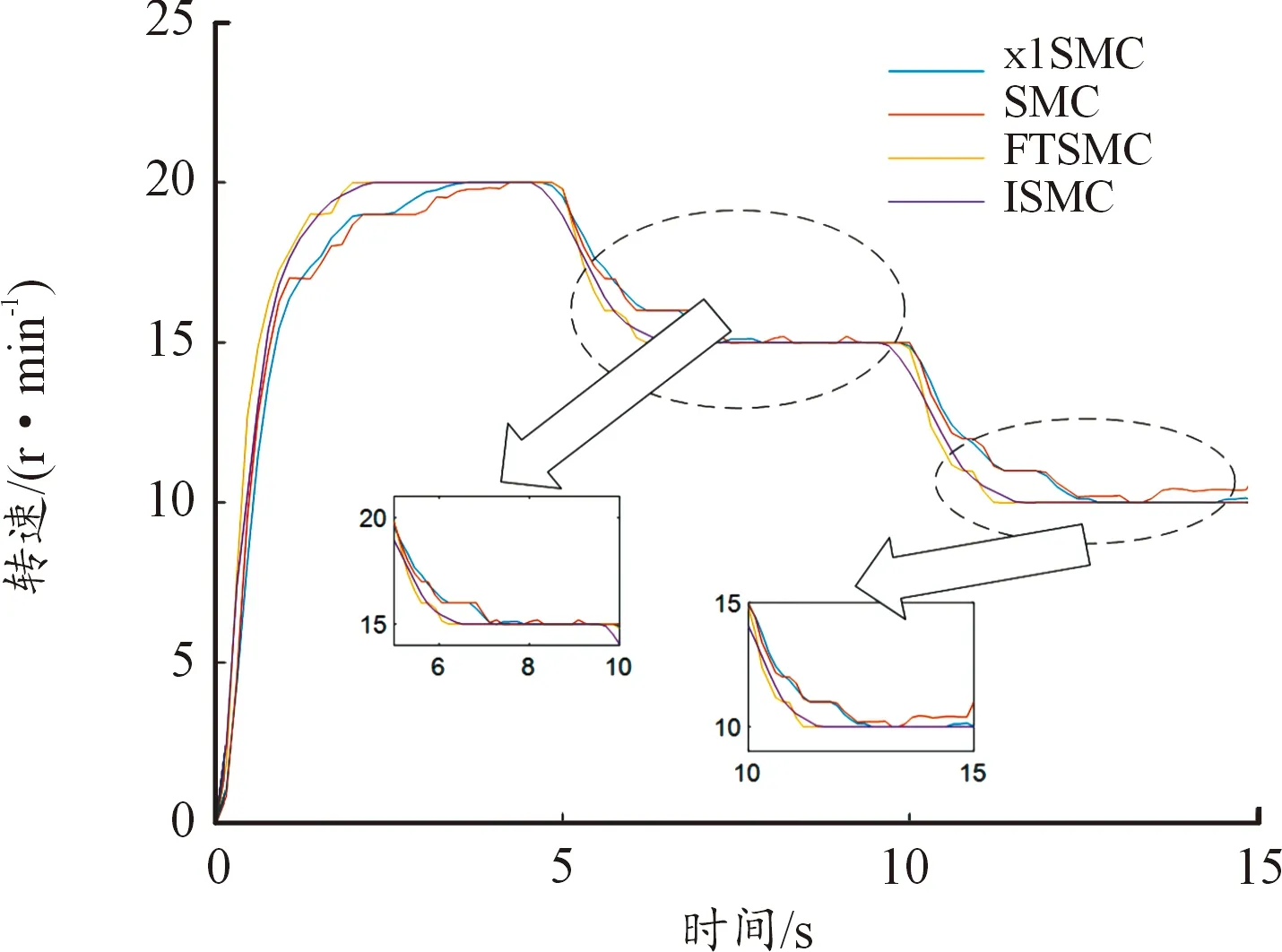
图9 4种算法减速实验的电机转速响应曲线
5 结论
将所提出的改进型滑模控制算法与其他3种控制算法在实验平台上进行调速实验。实验结果表明:改进型滑模算法不仅超调量明显减少,响应速度明显加快,而且基本消除了电机滑模控制的抖振情况。
猜你喜欢
西安交通大学学报(2022年7期)2022-07-19
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
北京航空航天大学学报(2021年9期)2021-11-02
水下无人系统学报(2021年1期)2021-03-10
中国测试(2018年9期)2018-05-14
轻兵器(2017年2期)2017-03-10
轻兵器(2016年20期)2016-10-28
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
