
自主智能寻迹机器人演示系统研发与学生综合素质提高
2021-12-16 09:53冯江平段濠宇
四川文理学院学报 2021年5期
傅 林,黄 林,魏 庆,冯江平,段濠宇
(成都工业学院 网络与通信工程学院, 四川 成都 611730)
0 引 言
智能自主寻迹机器人的一个典型就是智能小车.智能小车涉及电子电气、计算机、传感器、机械结构、控制理论与工程、模式识别、信号处理、嵌入式系统、软件工程、通信工程、智能计算和传动力学等多学科的科技设计.作为一种实用的机器人系统,智能小车广泛应用于航天工程、国防科技、工矿企业、仓储物流、医疗卫生、商业服务、险情救援等相关场所和领域,并且发挥了巨大的作用,深受受重视.国内外诸多企业、高校、科研机构都有许多研究成果或商业化产品问世,而且国内有很多学科竞赛都有智能小车类题目,比如全国大学生电子竞赛、全国大学生智能汽车竞赛、飞思卡尔杯智能车竞赛等.所设计、推出或参赛的智能小车形态、功能、性能创意各异,但是题目的基本架构都是嵌入式系统:结构+计算核心+驱动控制及其软件+传感器+通信接口.本项目主要目标在于使得学生通过智能小车演示系统的研发,锻炼学生的工程思维方式,提高其工程实践应用能力.
1 系统方案和框架设计
引导引导学生树立使命感和责任感,要求学生全面了解国内外智能小车以至于智能车行业领域研发、生产应用历史、现状和发展趋势,研发真正符合市场和我国人民实际生活需要的产品.根据教学经验,我们要求学生从文献检索开始,教他们如何拟定搜索关键词、如何定义目标网址范围,如何确定目标文献扩展文件名等,激发学生热情,使之从开始的茫然不知所措,到逐渐发生浓厚兴趣,积极主动投入搜集消化相关资料和文献.通过这一过程,项目组最终得出结论:根据不同的应用需求,智能小车整车架构、主控器芯片、传感器种类数量、通信接口等都有所不同或者大相径庭.本课题终极目标是希望推出新产品进入商用市场,但首先是参照各类学科竞赛智能小车设计制作的需要,设计实现一个演示系统,并且在整个过程中达到提升学生综合能力和素质的目的,从而使得学生有视野和能力去面向商用智能小车、工业用智能机器人以至于实际智能汽车等市场和需求去提高与拓展.小车整体框架结构,则主要设计两轮辅助平衡和四轮小车(仿蜘蛛四足机器人)两种类型.其中两轮辅助平衡小车框架结构如图1所示,而仿蜘蛛四足机器人系统框图如图2所示.
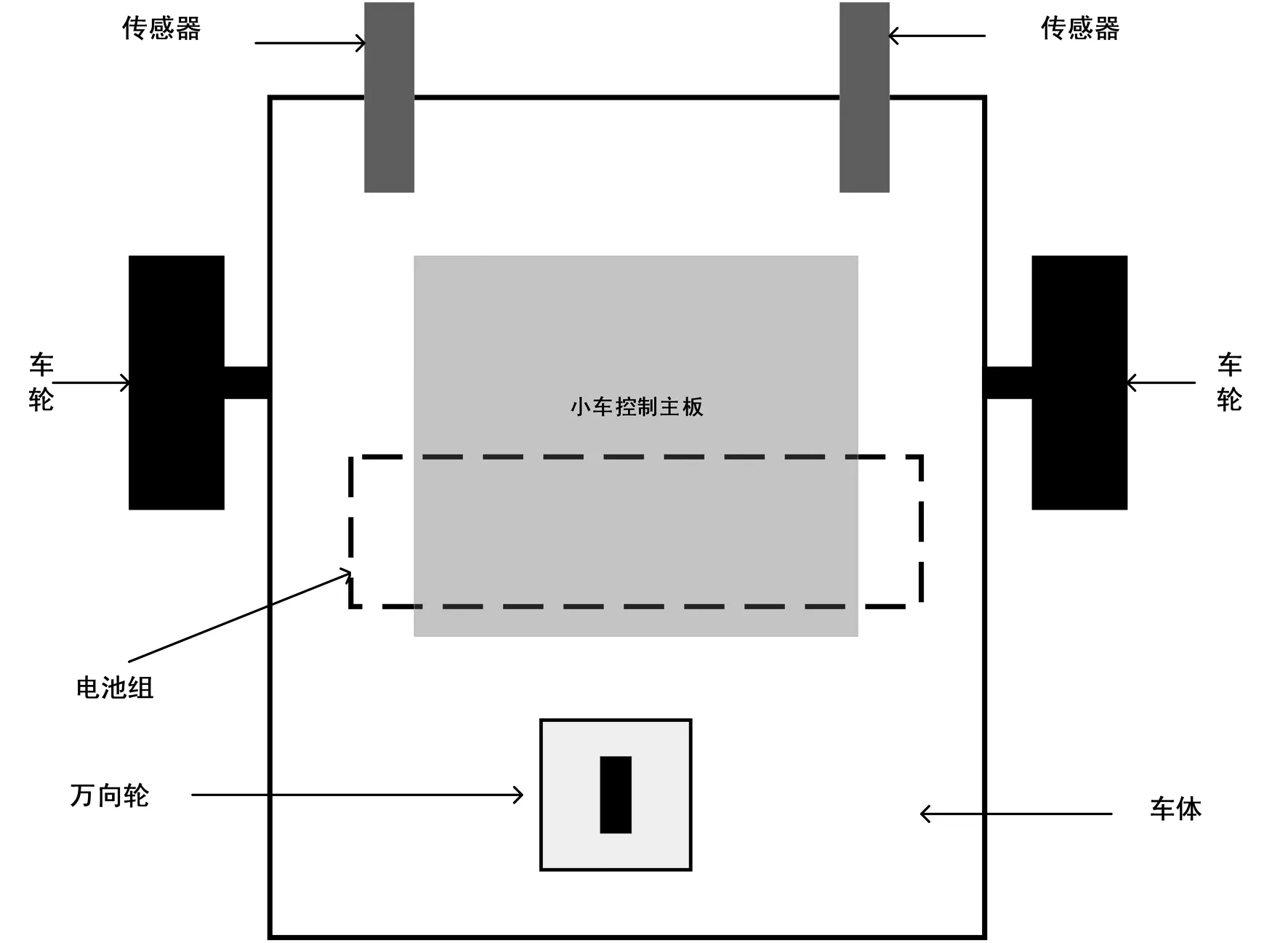
图1 两轮辅助平衡智能小车整车框架结构图
这样做的好处是,目标一致,互不冲突;有利于整个项目从立项、方案评审、详细设计、仿真、制作、测试和验收运行所有环节,贯彻自顶向下、逐步分解、模块化设计原则;有利于团队分工协作;有利于提高同学们的工程思维能力和实际研发水平;有利于拓展每一个学生的视野,开阔其思路,可以由点及面、由表及里、举一反三地较为全面和深入的理解、掌握智能小车研发软硬件资源以及相关理论与工程技术方法.
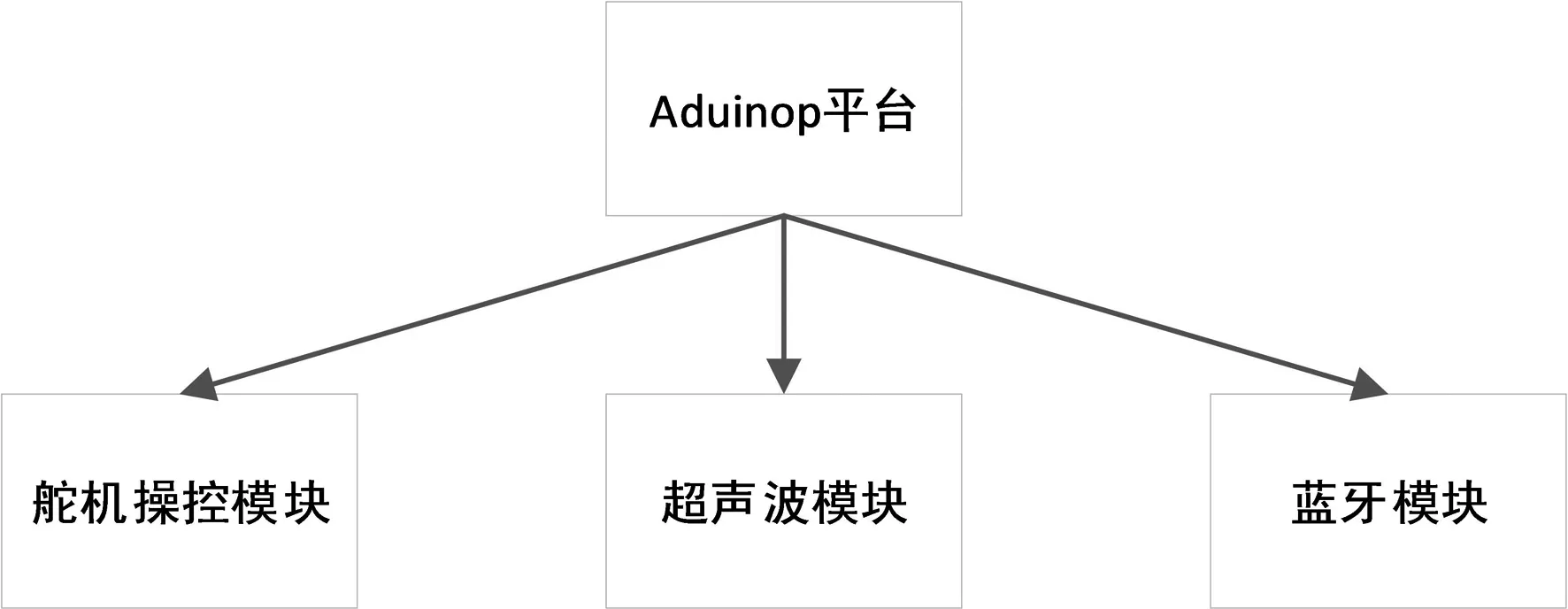
图2 仿蜘蛛四足机器人系统框图
通过项目方案论证和提出、确定过程,同学们发现,原来所需要的理论知识和工程技术是如此丰富众多,进一步深刻理解到自身存在的不足,同时认识到我国目前教育之所以存在诸多缺失,根本原因在于没有准确地回答大学生的主要矛盾是什么这一个根本性的问题.大学生的主要矛盾,是社会日益增长的综合素质需求与他们自身水平和能力不足的矛盾.这个主要矛盾,既要学校等教育机构、每一个教师有深刻认知与理解,同时也要让每一个学生深刻解读,从而落实到他们的整个学习过程中.[1]
2 树立和落实正确的教育教学理念
教育的目标,对于国家、社会和民族,就是培养人才及其队伍;对于学校,就是输出合格的教育产品;而对于学生个人,就是既增能又立德,以保证他们既能够自力更生,修身齐家,同时又能够回报国家、社会和民族,造福子孙后代.学生读书是在全维拓扑教育理念下的主动、自觉、积极、创造性地教学过程.所谓全维拓扑,既包含教育目标的全维化:个人能力和综合素质全面培育与提高;又包含了教育教学过程的全员、全过程、全方位即三全育人思想,以及包括产教融合和全社会协同育人导向与实施.第三,还同时包括教育教学主体、内容和形式的课程、科研、实践(课程实验、课程设计、工程项目实训、生产实践、学科竞赛等)、文化、网络、家庭、社交圈、媒体、社会和环境等十大育人体系.
3 采用面向对象教育模式
所谓面向对象教学,就是教学过程直接面向行业领域,面向生产实践,面向科研项目,围绕这样的对象展开.这些对象就是各个实际工程项目和科研课题、生产任务及其解决方案和过程、途径,它们是将各种各样创新性乃至于创造性的运用知识进行实践的方法与特定的知识封装在一起的.我们将单片机原理与接口、单片机C语言程序设计、传感器原理与应用、计算智能、控制理论、结构设计、电子设计自动化(EDA)技术等理论知识和工程技术方法,封装在智能小车设计制作课题这个具体对象中,让学生们边学边干、边干边学,将项目作为学习对象,反过来又将所学用于对对象的研发.
4 实现途径
本文的实现途径,可以在学校自身培育产业要素、形成企业元素,通过内涵式增长,形成教学内容项目化、教学成果产品化、教学目标工程化、教学过程管理公司化、教学人员技能工程化、教学模式体系化、教学质量和效果评估过程化的教育教学机制和体系,从而实现产教融合,校企结合的人才培养模式.本文主要讨论在项目实施过程中,电路设计和软件设计标准与规范遵照等问题,使学生们认识到,非常有必要参与各类学科竞赛以及老师的科研项目和课题,通过学校这个平台和老师的指导学到真正有用的东西,从而热爱学校、热爱专业,尊重和敬爱老师的情感更加深入和强化.
4.1 标准和规范遵守
智能小车也要受到多种标准和工程规范规约,包括系统电路、软件标准,可靠性、安规、电磁兼容性标准,以及所涉及到具体技术的相关标准和规范.标准和规范有国际标准、国际标准、行业标准和企业标准与规范等四级.本项目中,电路设计有原理图规范,PCB规范、电磁兼容设计规范、结构设计规范和工艺规范等,软件设计有嵌入式编码规范、C/C++国际标准等.除了要求学生遵照这些标准外,我们还引导学生熟悉和掌握智能汽车的相关标准,比如中国智能交通产业联盟标准T/ITS0102-2019:自动驾驶系统功能定义,中国软件测评中心——车载智能计算基础平台参考架构1.0(2019年),华为等十六家企业和单位联合颁布的智能驾驶功能软件平台设计规范v1.0系列5个标准,等等;以及华为华为MDC智能驾驶计算平台白皮书V1.1,华为核心网自动驾驶网络白皮书等等.遵照标准是一个国际惯例,一是可以实现兼容性,二是维护知识产权和话语权,三是获得市场准入证.而我们的还要求学生理解到,如果不遵照标准电路、程序进行设计, 则器设计结果不可能通过工程软件编译和硬件设计规则检验,就注定是失败的设计.
4.2 电路设计
智能小车电路设计内容很多,包括主控器模块、电源模块、传感器模块、电机(含舵机)驱动和控制模块、通信模块(蓝牙、WIFI或GPRS、5G等)、显示和报警模块等等.采用不同芯片和元器件设计的电路又各个不同,而且设计平台和软件也不同,比如EDA软件,各类单片机的开发软件和开源硬件设计平台Arduino等.在设计过程中,我们提醒学生,芯片,尤其是单片机、FPGA、DSP和CPLD、ASIC等,以及诸多ADC和DAC、集成传感器芯片,都是我国的短板,而工业软件尤其是EDA等以及编译器、操作系统等都是我国遭受米国佬围堵和打压的行业领域.目前,全球EDA软件供应者主要是国际三巨头Synopsys、Cadence和Mentor Graphic,它们的产品占全球市场的份额超过60%.我国EDA软件占比小,目前只有立创EDA和华大九天EDA等.我们鼓励和提倡学生使用国产软件进行自己的电路设计,扩大其应用范围,提高其影响力和市场应用价值,用实际行动支持国产品牌;同时也使得学生在实际项目研发中,能够拓展专业视野和思路,在边缘学科和交叉学科方面拓展和提升自己的技能和水平,比如能自己动手研发EDA程序等.[2]
4.3 软件设计
智能小车的各个模块,都需要软件进行实时操控.我们要求学生按软件工程项目管理规范进行设计,严格按照V模型(或者W模型、H模型)规划好系统,接口,以及各个模块的功能,给出系统框图、画出流程图,再进行详细编码设计,然后通过各种必要的测试环节直到验收.在软件及程序编码方面,要求学生熟悉和理解《GB/T 28169-2011嵌入式软件 C语言编码规范》,[3]IEC-9899C语言规范和IEC14882C++规范,及华为中兴等公司的编码规范等.引导学生在严格遵守编码规范的同时,也要在日常的学习和工作和生活中严格遵守社会行为规范.至于软件研发平台,编译器方面,我们鼓励51单片机组的同学使用南京伟福实业有限公司Wave6000进行软件开发,支持国产品牌.
智能小车软件设计的一个主要任务就是智能自主寻迹算法及其编码实现.本课题首先采用A*算法,该算法是一种在静态路网中求解最短路最有效的路径规划方法.其流程如图3所示.我们要求学生编码实现该算法,并且利用Matlab仿真,对其它算法进行编码、仿真,进而提出改进算法,以提高搜索精度和避障灵敏度,以及小车运行稳定度、系统程序健壮性和可靠性.由此拓展学生探索、创新的能力.
4.4 小车实作
小车实作,从电路板设计、加工,到元器件购买、安装、焊接,模块组装,电路和系统调试,软件测试全过程各个环节,细致到杜邦线的剪截、剥线,都要求学生严格按照工艺规范实施.通过实物制作直至最终成功的过程历练,学生体验到一种剥茧而出的成就感,一方面心情非常愉悦,一方面又从不足中得到激励,站到更高的台阶寻找新的方向,眺望更远更美的景色,感到受益匪浅,收获颇丰.
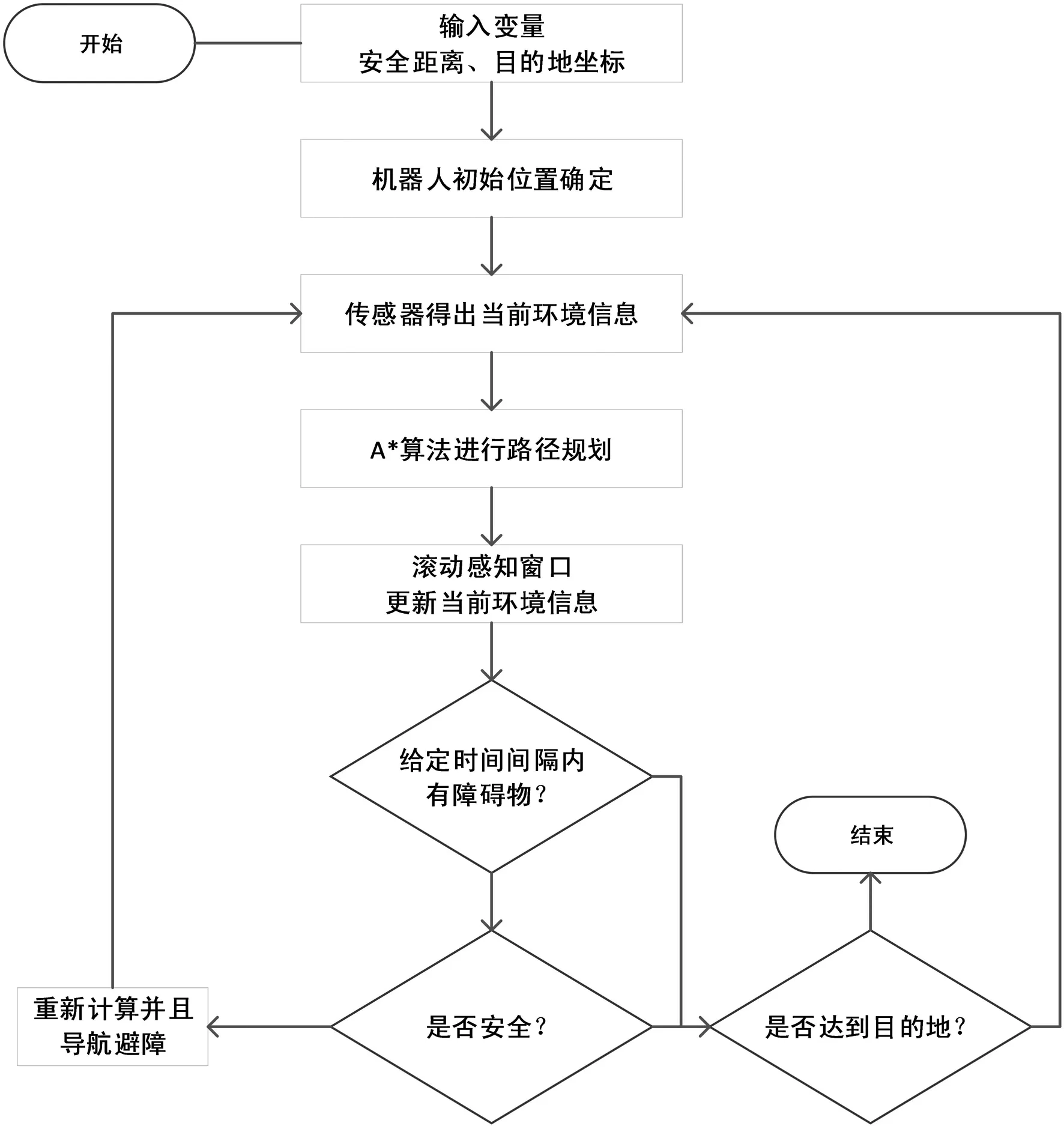
图3 自主智能寻迹控制程序流程图
结 论
本文课题来自于大学生创新创业训练项目,实现了智能机器人演示系统设计和实作,取得了产教融合、新工科建设、课程思政等教育改革实践方面的创新,做出了有益而积极的探索和实践.一是在教育教学理念、模式方面进行了有益的探索和实践,贯彻落实了全维拓扑教学理念和面向对象教育模式.二是在产教融合教育教学改革和新工科建设过程中,提高了学校的教学质量和培养水平,既提高学生工程技能,又提高了他们的综合素质.三是使得师生深刻认识到,产学研以致用,不能够流于口号,要落到实处、接地气,一定要把学到的用起来,想到的设计出来、设计好的做出来,再把做出来的用起来,而不能够把科研和教学仅仅当作追逐个人名利的手段.四是拓展了课程思政内容和空间,以生动而且无需刻意为之的方式实现对学生核心价值、爱国主义、爱集体教育等,是实现三全育人、协同育人的有效途径和方式.
猜你喜欢
北部湾大学学报(2022年1期)2022-06-22
北部湾大学学报(2022年2期)2022-06-21
现代仪器与医疗(2021年4期)2021-11-05
北部湾大学学报(2021年4期)2021-04-28
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
文苑(2018年23期)2018-12-14
文苑(2018年22期)2018-11-19
文苑(2018年19期)2018-11-09
文苑(2018年17期)2018-11-09
