基于受力变形的主从介入导管配准技术研究
2021-12-17 00:56齐金龙胡陟孙丽岩
智能计算机与应用 2021年6期
齐金龙,胡陟,孙丽岩
(上海工程技术大学 电子电气工程学院,上海 201620)
0 引言
介入手术是指在医学影像指导下,医生手工操纵医疗器械,进行精准协作,将其送至病灶处,实施手术治疗[1]。相比于传统的介入手术治疗,主从介入手术机器人凭借精确、安全、灵活的特点,更适用于复杂的手术操作[2]。然而主从配准过程中的误差会影响导管准确到达目标病灶处,错误的位置引导可能会引起严重的并发症,甚至导致病人死亡[3]。
配准是介入手术图像引导的关键和难点。主要有基于特征的配准方法和基于面匹配的配准方法。A.de Lambert等人在腔内动脉瘤修复手术中将电磁传感器输出的三维的位置信息用于配准研究,运用梯度下降法求取患者坐标系和图像坐标系间的转换参数时,容易陷入局部极值,影响配准精度[4];基于面匹配的配准法通过采样的方法在图像空间和手术空间提取相应点云,通过迭代算法将两个点云进行匹配,但该算法稳定性不足,精度与点配准相比不高[5]。在肝脏消融等微创介入术中,因人体内部软组织易受呼吸、心跳以及介入器械碰撞接触等因素的影响,术中解剖结构会发生形变,导致主手端虚拟空间和从手端真实空间无法准确的配准,进而导致插入精度降低[6]。
针对以上问题,本研究基于受力变形,根据物理模型计算导管接触点的形变位移,通过最小化目标函数获取主从点集之间的变换矩阵,从而实现准确的主从空间配准。
1 主从介入手术系统介绍
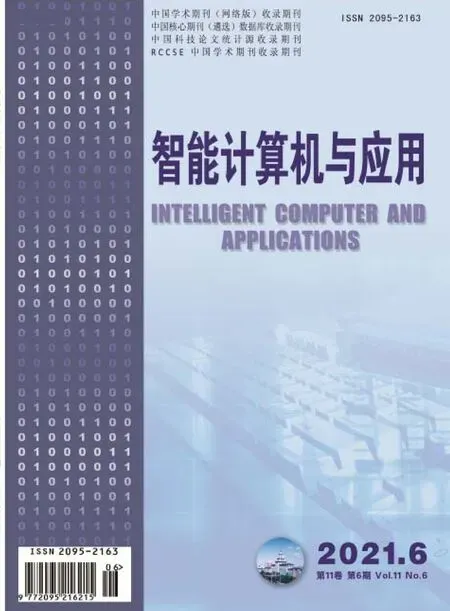
主从介入手术系统的结构如图1 所示,由Omega.7 手控器、引导图像、UR5 输送装置、介入导管、力传感器组成。
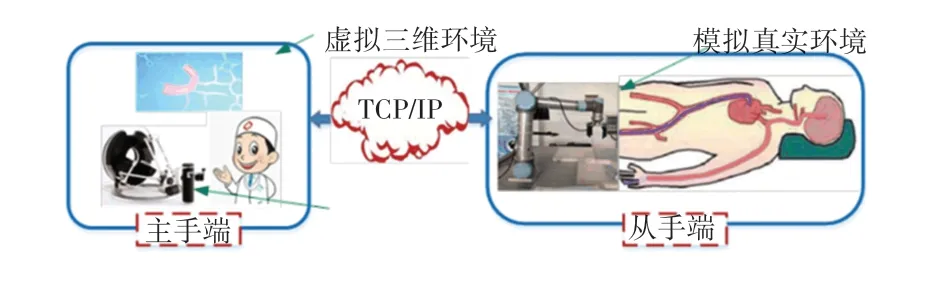
图1 主从介入手术系统结构Fig.1 Structure of Master and Slave Interventional Surgical Systems
其中,主手端三维引导图像是医生与系统交互最为直接的窗口。从手端由传感器获取的测量力计算导管各接触受力路径点的变形位移,通过TCP 通信,将三维位置坐标实时传到主手端的配准模块,实现配准。完成配准后,通过主手端三维图像,医生可以直接观察到手术环境和医疗器械的相对位置,决定是否进行导管插入/旋转以及其它相应复杂操作。
导管插入示意图如图2 所示,血管内导管从起始点A经过B到目标位置点C。D为主动脉分支内的导管通过三维图像被引导进入心血管动脉的放大示意图。
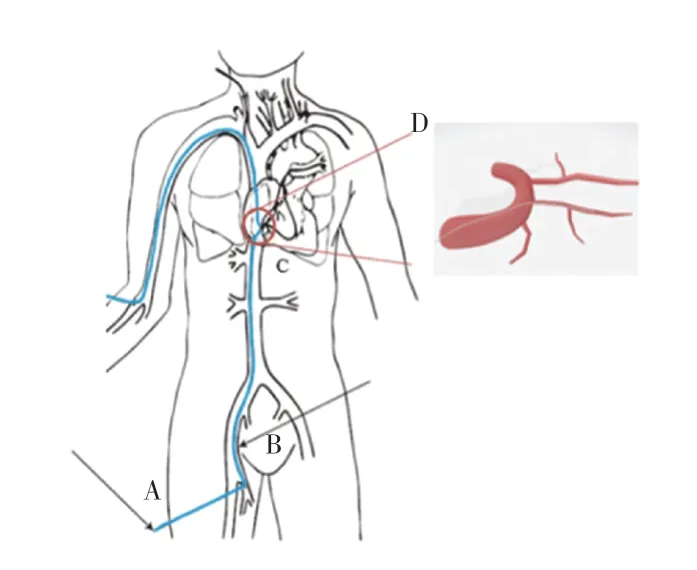
图2 血管内导管插入过程示意图Fig.2 Diagram of Endovascular Catheter Insertion Procedure
2 主从导管空间配准
主从导管配准通常采用经典的最近点迭代法(Iterative Closest Point,简称ICP),即根据从手端导管测量的路径点qk,反复迭代,在主手端血管中心线寻找距离该点最近的对应点pk,以此来计算最佳转换矩阵[7],如式(1)所示:

然而,ICP 算法是寻找从端导管路径点和主端中心线对应点的变换,使从手端路径点映射到主手端虚拟图像中的对应点,是纯几何位置的变化,没有考虑到导管与血管壁接触受力时的物理变形对配准的影响。
在介入手术中,可把导管运动分为自由运动和接触运动。自由运动时导管不与血管壁接触产生受力变形,主从配准误差只与其从端路径点和主端中心线对应点的欧式距离有关。接触运动时,导管运动过程中,与血管壁碰撞,产生接触受力,如图3 所示。而导管受力时,会使血管壁发生弹性变形,其造成的位移也会对配准精度产生影响[8]。
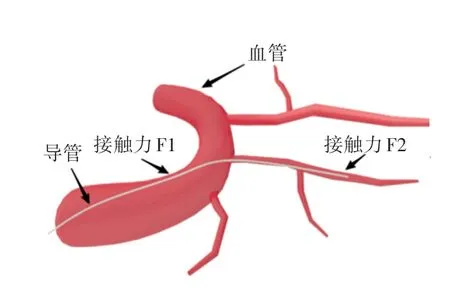
图3 导管受力示意图Fig.3 Catheter Contact Force Diagram
针对运动接触阶段导管受力,构建受力形变模型,求解导管接触点形变位移量,再基于形变位移计算目标函数,通过迭代,估计最佳转换矩阵。
2.1 基于测量力求解形变位移
本研究针对导管受力变形对主从配准精度的影响,引入了导管受力形变位移Δxk,因为受力造成的形变越大,导管路径点与中心线对应点的偏移距离也就越大。
与传统ICP 方法相比,本研究的目标是不受导管受力变形的影响,提高目标函数的有效性和准确性,获取最优转换矩阵,计算导管路径点和中心线对应点之间的最小距离。于是在配准的目标函数中加入相对距离的概念。
路径点与中心线对应点间相对距离的计算方法,如图4 所示。点a和点b是接触运动阶段导管受力接触点,△x1和△x2为其相应形变位移。点a与对应点之间的距离为d1,点b与对应点间的距离为d2。这里点b与血管壁的接触受力比a的大,受力越大,变形越大,可以明显看出,点b实际上比点a更远离中心线对应点。而相对距离能够降低受力形变对偏离程度的影响。

图4 对应点相对距离示意图Fig.4 Relative Distance Diagram of Corresponding Points
引入形变量Δxk后,与传统的ICP 算法相比,如式(2)所示,本研究目标函数基于受力变形,使对应点的相对距离最小,来求解转换矩阵;而不是如式(1)所示,求解对应点的欧式距离。

随后,基于弹簧-质子模型,通过力传感器得到测量力F测=(Fx,Fy,Fz),求变形量Δx=(1/k)F测。而测量力主要取决于x、y、z3 个方向上的切向弹性系数、纵向弹性系数以及形变位移,可以得到式(3):

其中,ka,kb为各向同性的情况下,即在水平平面x、y方向上切向弹性系数,kc为纵向z方向上弹性系数,则可以得到从手端接触点在时间轴k处的形变位移量,式(4):

估计转换矩阵,依次迭代,即可实现主从导管受力变形的空间配准。
2.2 转换矩阵估计及配准
本研究基于形变位移的相对距离,得到最小目标函数,进行转换矩阵的估计,式(5):

其中,为转换矩阵;qk和pk分别为主手端导管路径和从手端血管中心线对应点;Δxk为从手端由测量力在k时刻计算的变形位移,以此目标函数进行迭代,实现主手端与从手端的导管位置误差的最小化。
得到基于主从受力形变位移的目标函数后,对配准进行总结,将其归纳为以下流程:
(1)计算得到从手端接触点变形位移Δxk;
(2)计算旋转和平移矩阵Rk、Tk,使得Eerr()=min;
(3)计算配准后的导管位置pk+1={pk+1∣pk+1=Rkpk+Tk,pk∈p};
(5)如果‖dk+1-dk‖<τ,迭代终止,否则返(2)。
上述步骤将计算得到的基于形变位移的导管位置用于最小化目标函数式(5),来计算旋转矩阵R和平移矩阵T。再基于得到的转换矩阵计算,得到所有点对的平均匹配误差dk+1,如果‖dk+1-dk‖大于阈值,则把pk+1代替pk,重新计算R和T,直到‖dk+1-dk‖<τ为止。至此,完成主从导管受力变形的配准。
完成主从配准后,在导管介入的过程中,从手端基于力传感器测量力计算导管接触点形变位移进行补偿,每次得到导管位置后对其进行相应的位置转换,从而在主手端虚拟环境中实现导管受力变形位置的精确显示。
3 导管介入手术实验及分析
本研究软件基于OpenGL 和Chai3D,在Visual C++的MFC 平台上实现主端虚拟环境的显示。硬件使用一款瑞士Force Dimension 的Omega.7 力反馈,在主手端获取医生的移动命令,同时传送到从手端6 关节轻型机械手臂UR5 驱动装置,用于驱动从端真实导管。主从实验设备如图5 所示。
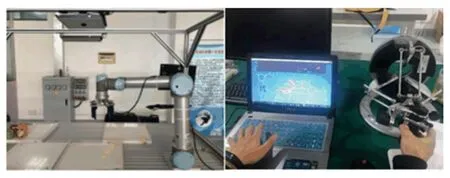
图5 主从实验设备Fig.5 Master-Slave Lab Equipment
介入手术过程中,主从导管的变形位移直接影响配准精度。本研究进行了如下实验,进行配准误差分析,以证明所提出的基于受力变形的配准方法的性能。
3.1 实验步骤
实验过程中,医生在主手端握持手柄进行推拉/旋扭操作,将位于从手端装配在UR5 机器人末端的导管由主动脉血管经过分叉血管到达目标病灶处;基于从手端力传感器采集的数据,计算变形位移;根据配准计算得到的最佳转换矩阵的结果,在主手端虚拟环境中实现导管变形位置的实时显示。
3.2 配准实验误差分析
配准过程分为自由运动和接触运动。导管力-时间图,如图6 所示,表明30~33S 与47~51S 有接触受力,属于接触运动阶段,本研究改进的方法将对该阶段受力变形位置进行了补偿。
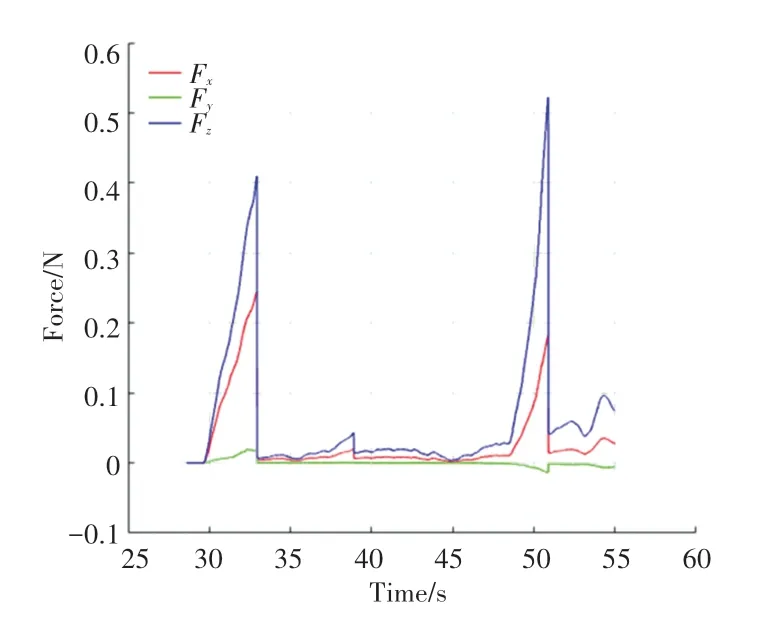
图6 配准过程导管受力波形图Fig.6 Catheter Force Waveform During Alignment
实验中,采用传统的ICP 方法对整个阶段进行配准,与本研究改进的基于受力变形配准方法对比,得到图7、图8 所示的配准前后各路径点位置数据,由于改进的方法对变形位置进行了补偿,配准后主从导管路径位置相似度明显高于传统ICP 的配准方法。
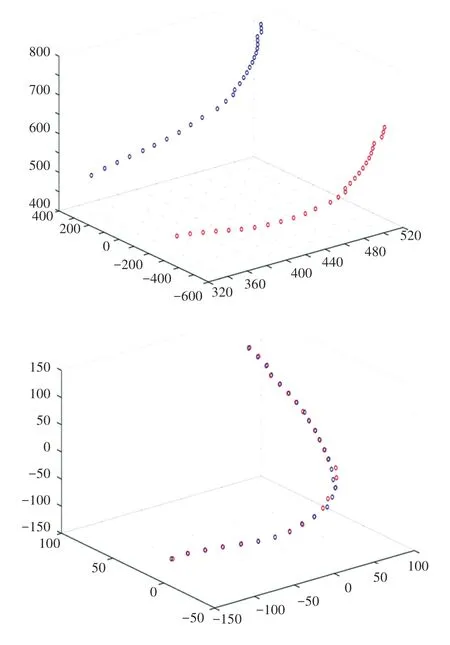
图7 传统ICP 方法配准前后各路径点位置Fig.7 Location of Path Points Before and After ICP Method Alignment

图8 基于受力变形方法配准前后各路径点位置Fig.8 Location of Path Points Before and After Based on Force-Deformation Method
为了定量分析该方法在整个配准过程中的误差变化趋势,本研究通过公式(5),计算导管路径点所对应的配准误差,最后得到如图9 所示的结果。
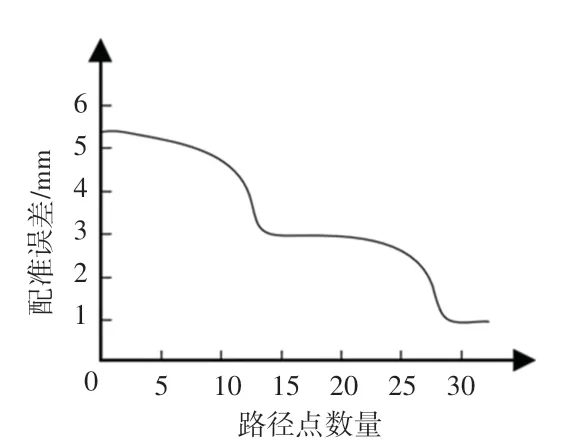
图9 配准误差Fig.9 Alignment Error
由图9 可知,配准过程中,配准误差逐渐减小,在第10 和第25 个路径点左右,误差降低幅度增大。因为此时导管处于接触受力阶段,而改进的基于受力变形的配准方法使用变形位移对目标函数进行了补偿,进而降低了配准误差。随着配准过程中路径点位置信息越来越多,迭代次数越来越多,获取的转换矩阵精度趋于稳定,对应的配准误差越来越小,并最终稳定在0.99 mm 左右。
4 结束语
本研究提出了一种改进的方法,基于受力形变进行主从空间配准。通过引入主从形变位移,建立了新的目标函数,求解转换矩阵。最后做对比实验,并对得到的配准结果进行误差计算和分析,证明了改进的配准算法的准确性,达到了目标精度。
除了通过主从配准技术,在主手端实时显示从手端导管位置以外,未来的研究还将包括主手端重建交互力,避免了从手端由传感器测得力数据的传输延迟;还包括力觉预警,介入手术时,当导管与血管壁接触受力超过安全阈值时,这种方法可以用来警告医生,避免手术误操作,对病患造成二次伤害。
猜你喜欢
初中生学习指导·中考版(2022年1期)2022-02-09
教学月刊·小学数学(2021年2期)2021-02-08
疯狂英语·爱英语(2020年12期)2020-12-29
疯狂英语·爱英语(2020年12期)2020-12-29
初中生学习指导·中考版(2020年2期)2020-09-10
中学数学杂志(初中版)(2019年6期)2019-01-14
中学生数理化·七年级数学人教版(2016年8期)2016-12-07
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
数理化学习·初中版(2011年9期)2011-11-14