
开关磁阻电机转速调节器参数模糊自整定的研究
2021-12-17 02:03邹洪建
电机与控制应用 2021年11期
栾 茹, 邹洪建
(1.北京建筑大学 电气与信息工学院,北京 100044;2.建筑大数据智能处理方法研究北京市重点实验室,北京 100044)
0 引 言
调节器是实现对被调量闭环纠偏的必要组成元件,根据经典控制理论,当被调量所处的系统输入与输出之间存在确定的传递函数关系时,该调节器参数一定具备不变的确定解且具备经典的求解方法;反之,当无法确定被调量所处系统的输入与输出之间函数关系时,则确定该调节器参数相当困难[1-4]。被调量所处系统的输入与输出之间是强非线性关系时,属于无法确定其中函数关系的那一类情况,确定这样的调节器参数一直是具有很大学术价值的研究命题。开关磁阻电机(SRM)因其独特的双凸极结构以及严重的磁饱和现象,是典型的非线性控制对象,特别是由其构成的驱动系统的输出转速,与该电机的输入(即SRM的转矩)之间是强非线性关系,因此如何准确实现SRM驱动系统转速的闭环控制,一直是电机控制领域的难题[5-6]。
在认识SRM驱动系统的初期,人们曾试图用简化线性模型来回避其非线性问题,还是沿用传统PID速度调节器将其输出转速构成闭环,进而达到控制速度的效果。例如文献[7]曾建立了以相电流斩波值、导通角、关断角为输入的SRM小信号线性化模型,再利用经典控制理论确定该转速调节器参数。但是,这样的调节器构造出的转速闭环难以适用于SRM驱动系统的整个调速范围,抗负载扰动的性能也存在明显的问题,反映在一定负载条件下的一些转速上,转速调节器参数不合适导致较大转速超调。这是因为SRM本体内的各个物理量之间是强非线性,不能用简化的线性模型来表达这些强非线性数学关系。为了解决SRM这种强非线性问题,众多学者给出了一些可供参考的解决方式。文献[8]设计了一种分数阶PID控制器,选择系统的速度响应构建目标优化函数,采用灰狼优化算法整定调节器,离线计算其最优的参数,但是只取得在较低转速情况下较好的控制效果。文献[9]使用傅里叶变换写出了12/8 SRM的数学解析式,但其推导的数学表达式相当复杂,难以应用到实际系统中。文献[10]对PID调节器引入了BP神经网络,但其控制精度依赖于所取神经元隐含层的层数,隐含层层数较少会造成较大的误差,层数较多会大大降低系统的响应速度。文献[11]在传统模糊控制器的基础上,根据SRM调速系统历史数据知识库,设计模糊规则,在PWM控制方式下建立转速、电流双闭环控制系统,电流环仍选取经典PID控制器,转速环设计为模糊自适应参数向量群,并在一定的转速误差范围内进行补偿控制,提高模糊控制器的精度和时效性。
本文在总结吸收前辈学者的这些研究成果的基础上,分析SRM各个物理量的逻辑关系,特别是SRM的电压、磁链、转矩与转速之间的关系,据此重新设计SRM驱动系统的控制结构,然后将PID调节器和模糊控制结合起来构成模糊PID调节器,利用模糊规则实现对PID调节器的比例、积分、微分参数的自适应调节,使SRM在整个调速范围内,不论负载如何,都能够在不依赖其精确数学模型的情况下,实现准确而较快的速度调节、无超调。通过MATLAB/Simulink进行调速的仿真试验,对该控制方式的有效性进行验证。
1 建立SRM驱动系统的控制结构
根据SRM的工作原理,定子各相绕组依次施加励磁电压,则产生变化的磁阻,进而产生拖动转子运动的转矩,据此本文建立起图1所示的SRM电磁关系的数学模型,这个过程中需要使用有限元数值计算方法,得到SRM定子各相绕组在电源电压U激励下形成的SRM内部瞬态电磁场中定子电流随磁链与位移角的分布i(Ψ,θ)以及由变化的磁阻产生的驱动转矩随电流与位移角的分布T(i,θ)。在非线性问题的求解上,有限元数值计算是一种行之有效的数学工具,本文借助于这一数学工具获得了大量的离散的数值结果。
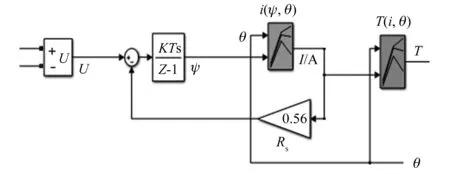
图1 SRM的电磁关系数学模型
SRM逻辑关系中的第二输入与输出关系是指,SRM转子在磁阻转矩Te的拖动下克服负载TL扰动输出被调量转速ω。据此本文建立的有关SRM机械平衡关系的数学模型如图2所示。
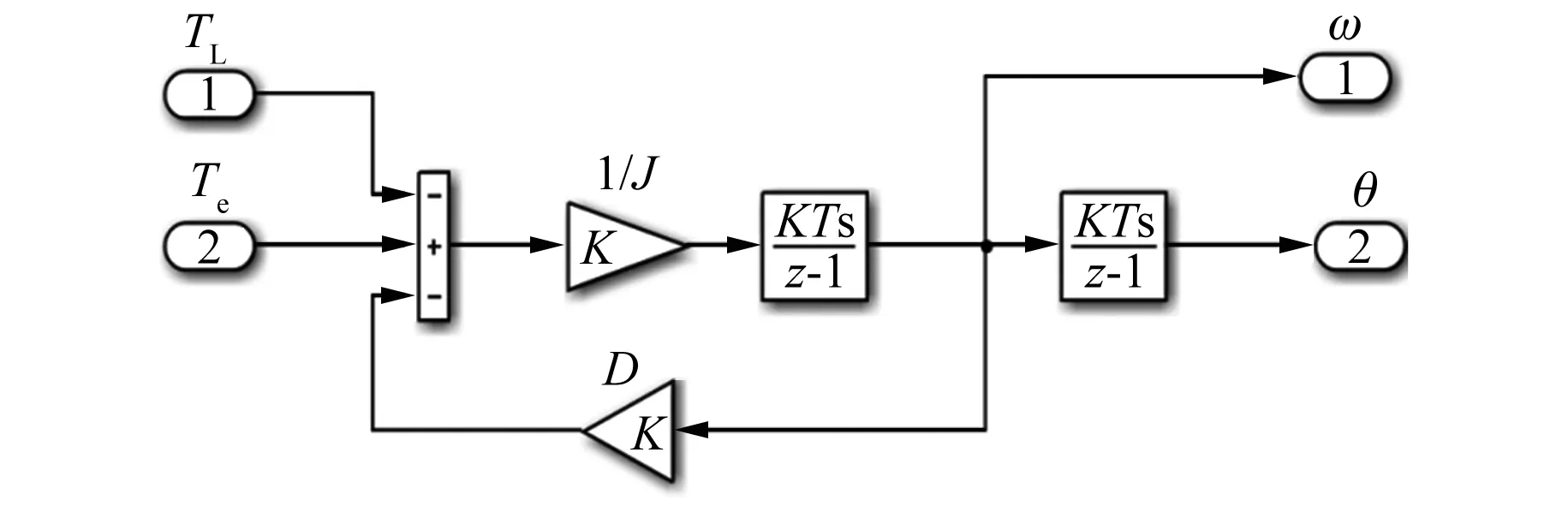
图2 SRM的机械模型
梳理图1和图2的逻辑关系,利用图2的逆关系建立起转速外环,换言之,根据SRM当前的转速指令反推出其期望转矩,相当于求图2的反函数。然后同理,利用图1建立起转矩(电流)内环,根据期望转矩反推出所施加的SRM励磁电源电压。这种控制关系中只需要设置外环转速环的调节器,而转矩内环采用比较关系与转矩分配函数[12-13]加以处理,如图3所示。可见,本文提出控制结构,重心落在转速调节器上,该调节器参数如前所述,不能采用已知输入与输出之间传递函数的线性模型来确定,因为图2所示的机械模型是强非线性的。经过多方比较,本文采用推理机制比较清晰的模糊理论构成PID参数的自适应,根据不同的当前转速自动调整该PID调节器的3个参数,使SRM在整个调速范围内,无论负载如何变化,其转速始终均是无超调闭环的,实现对SRM驱动系统转速的合理控制。
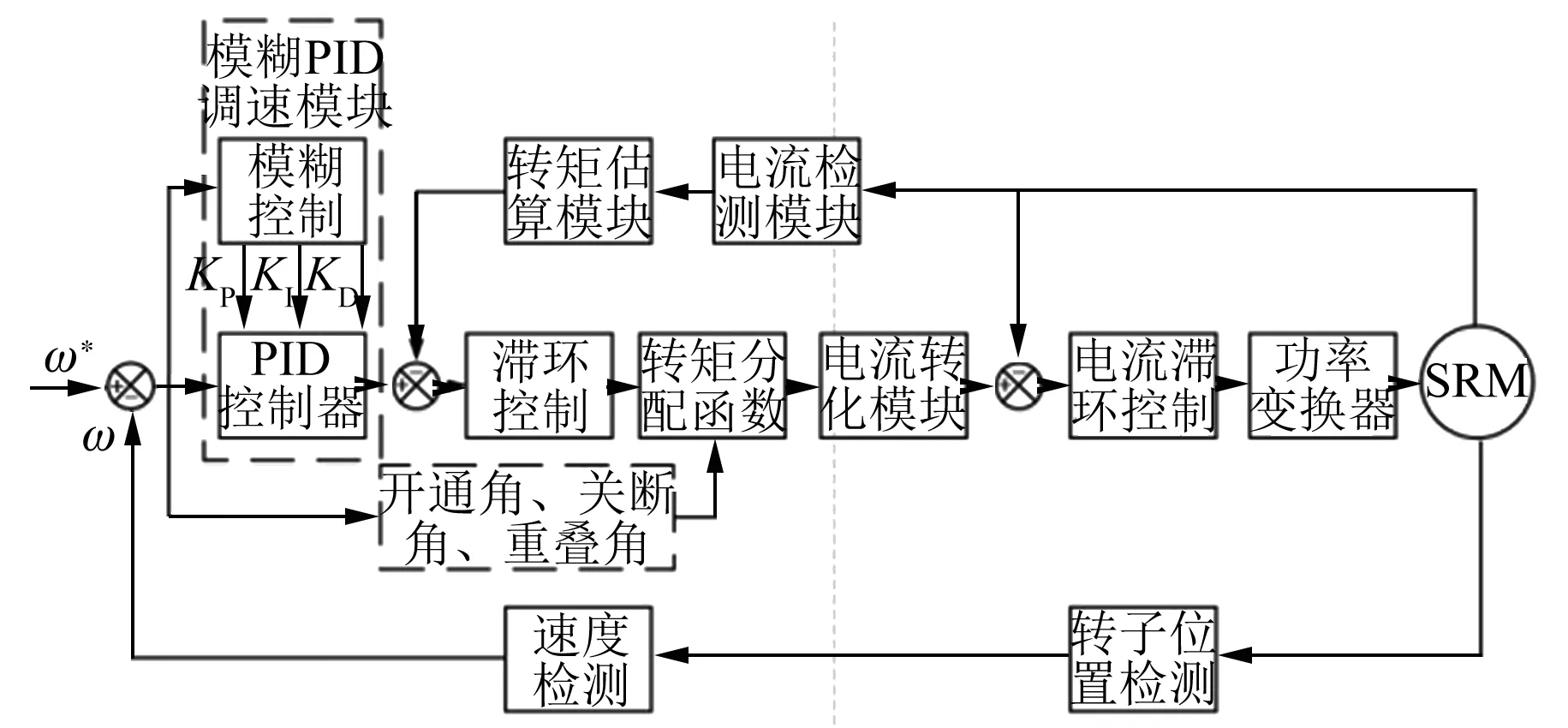
图3 基于模糊PID转速调节器的SRM控制结构图
2 SRM的模糊PID调节器
根据图3所示的控制逻辑,整个SRM驱动系统以速度指令为给定输入,再与该SRM实际输出转速的反馈量进行比较,用这个转速差作为转速调节器的输入,则该转速调节器根据该速度差输出一个合理的期望转矩,使得SRM的实际输出转速与给定的输入转速不断接近,进而实现了运用转速调节器纠偏被调量转速,使整个驱动系统的实际转速很快达到指定速度。在这个调节过程中,因为转速调节器处于外环,是主导环,所以该转速调节器参数的取值决定了整个驱动系统的闭环控制是否收敛。特别是当给定输入取不同的转速、负载发生变化时,由于SRM的强非线性,不存在固定不变的传递函数,则转速调节器参数必须随着给定输入及负载的变化而相应调整,而这个参数调整过程必须是在无须建立传递函数的前提下自动完成,可见,采用模糊理论实现这种自适应整定调节器参数是十分必要的。
2.1 PID控制的分析
PID调节器的基本公式为

(1)
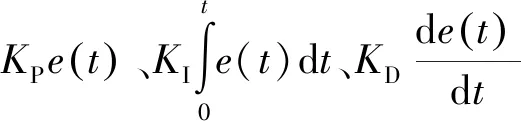

可见,一个PID调节器的比例、积分、微分环节是相互补充而又相互制约的[14],若要保证该调节器的被调量始终是闭环收敛,则这3个环节的参数必须要平衡,特别是当被调量是强非线性的,则这3个参数的关系必须是动态平衡关系。
2.2 模糊PID控制器的建立
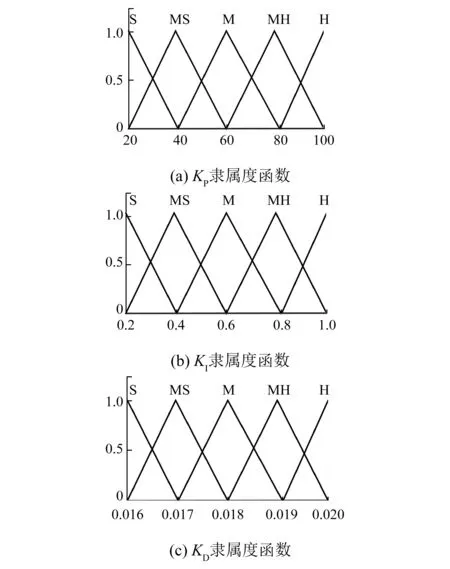
图4 3个模糊输出量的三角形隶属度函数分布
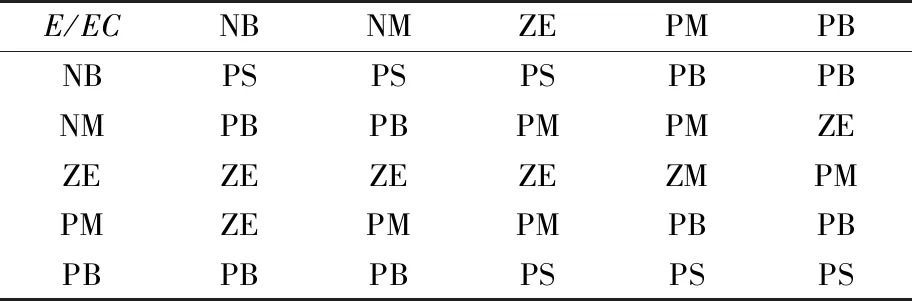
表1 KP模糊规则表
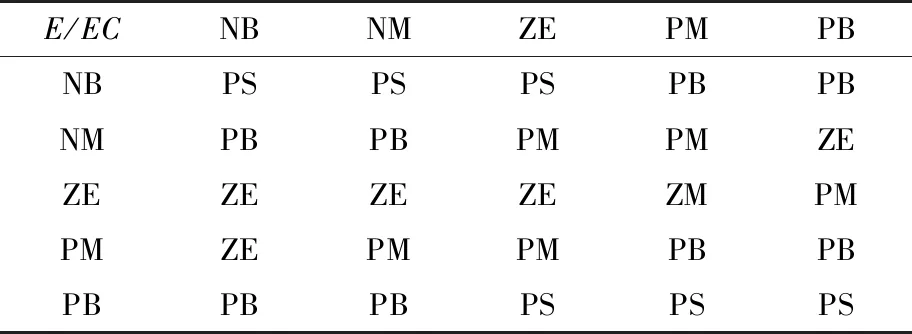
表2 KI模糊规则表
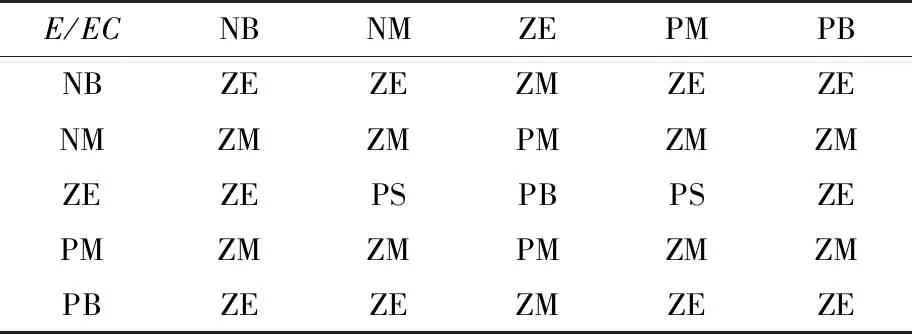
表3 KD模糊规则表
3 三个调速系统的仿真试验
本文所依托的这台三相12/8极SRM的结构数据及额定参数列于表4中。

表4 仿真用12/8 SRM参数
根据表4中的数据, 本文运用Magnet软件中有限元数值计算功能获得了大量的转矩与位移角度之间、电流和磁链与位移角度之间、电流与转矩之间的离散数据,图5中提供了这些数据的三维分布图,为转速调节器的模糊推理过程打下了必要的基础。
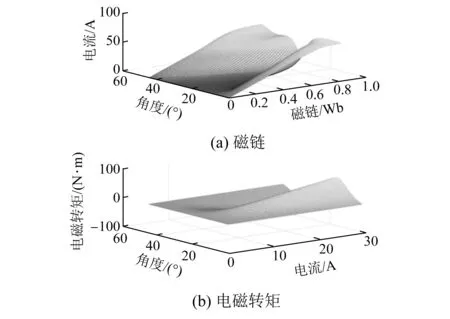
图5 磁链和电磁转矩随位移角度、电流变化的有限元计算数据三维图
为了检验2.2节提出的模糊PID转速调节器,本文选择了3种不同的控制方式,分别为,固定参数的PI调节器、无PI环节的模糊调节器、模糊PID调节器,对该台SRM分别搭建了3种Simulink模型进行仿真,其中用试凑法确定了PI调节器的P和I两个参数,为了能够减少试凑参数带来的干扰,去掉了调节器中的微分环节[15]。首先在初始时刻将给定转速设定为1 000 r/min,负载转矩设为6 N·m,进入稳态之后降低到600 r/min,稳态后再回到1 000 r/min,3个调节器对应的仿真模型的输出端均得到了转速随时间变化的波形,如图6所示。
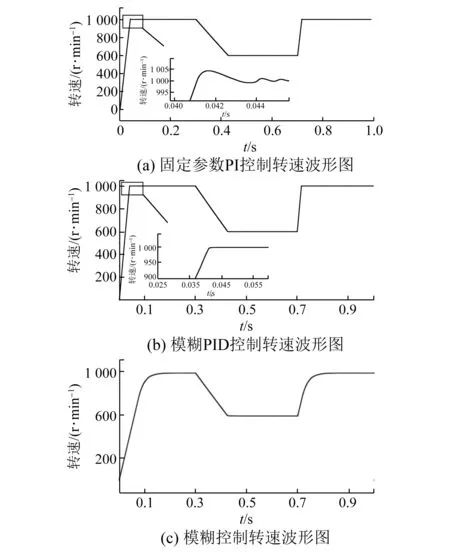
图6 改变给定转速过程中的3个仿真模型的输出转速
由于试凑参数选择合适,由该固定参数的PI调节器构造出的闭环转速约在起动后的0.1 s进入稳态,从图6(a)中放大部分可见,转速进入稳态前略有超调和振荡且稳态后输出转速比给定转速大了1.4 r/min,基本上实现了无差,当给定转速变化时,该PI调节器也能实现较好的跟随性,使得输出转速跟着给定指令的变化而相应改变到指定的转速;模糊PID调节器控制下的SRM同样约在0.1 s达到稳态,且稳态后的输出转速略小于给定转速0.4 r/min,当改变给定转速时,模糊PID同样能实现较好的跟随性能;表现最差的是模糊控制器,主要缺点是随着给定转速的变化,其输出转速动态调节时间长,说明跟随性不如前两个调节器,而稳态后的输出转速还存在一定的静差,如图6(c)所示,当将模糊论域进行九等分时,仍有8.7 r/min的静差。模糊控制的输出,需要一系列的运算时间,模糊论域等分的越细,运算时间则越长。因此,在闭环控制的调节器设置上,不能只用模糊环节来构造,必须增加能提高其快速性的因子,如比例因子,有了比例因子,再根据经典控制理论,还需要加进其他因子进行平衡,这就是构造模糊PID的必要性。不仅如此,模糊控制中的推理均存在一个最小判断范围,若模糊调节器的输入值降低到模糊论域最小判断范围区间里,模糊推理时便把输入当作0来处理,而实际上不是0。当对模糊论域细化到九等分时,模糊调节器的最终输出还是约有不超过0.9%的误差。可见,仅仅依靠模糊控制从理论上是无法实现SRM无静差调速。因此,根据图6 的仿真结果,本文否定了模糊调节器的转速闭环控制,接下来只比较剩下的2个调节器。
当初始时刻将给定转速设定为较低的100 r/min,负载转矩设定为轻载1 N·m,以及将给定转速设定为100 r/min稳定后0.2 s时刻,负载转矩从9 N·m突减至1 N·m,用固定参数PI调节器和模糊PID调节器对应的2个调速系统对这2个过程进行仿真试验,其输出转速比较如图7所示。可见,固定参数PI调节器暴露出其弊端,一开始轻载加速过程中出现了十分明显的输出转速超调现象,超调量达到了7 r/min,这在精确调速系统里是不允许出现的,说明固定参数PI调节器因其参数不变,只针对某个转速段及一定负载下,本文中是不小于1 000 r/min和4 N·m能够比较准确调速,但是在小于100 r/min的低速范围内,以及轻载条件下,因出现明显的动态超调而无法用于动态性能要求高的调速系统;另外100 r/min给定转速下,当出现负载由9 N·m突减至1 N·m这种大的负载扰动时,如图7中的(b)所示,固定参数PI调节器下的转速尽管最终能够收敛稳定下来,但存在明显的振荡过程,同样不利于动态性能要求高的调速系统。相比较而言,模糊PID调节器在整个调速范围内、不同负载以及大幅度的负载扰动等条件下均表现出稳定、较准确的调速性能。
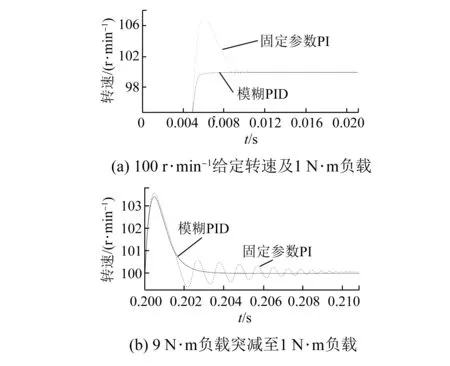
图7 模糊PID与固定参数PI调节器转速动态过程的比较
模糊PID之所以能够避免任意速度给定和负载下的转速超调,是因为比例(P)、积分(I)、微分(D)参数随着其输入端转速差的变化情况,根据设定的模糊规则进行自适应调整,而不是固定在某个值上保持不变,以初始给定转速为1 000 r/min,负载转矩为6 N·m,先降低到600 r/min再回到1 000 r/min这个过程为例,这3个参数的自适应调整变化情况如图8所示。从图8中可知,在SRM起动一刻(t=0),模糊PID调速控制器的输入E和EC较大,此时较大的参数KP和KI使输出的期望转矩较大,加快系统达到给定转速,与此同时,参数KD必须很小,防止其降低系统的响应速度。当系统接近稳定阶段时(t=0.1 s)E和EC较小,较大的参数KD能够稳定其输出端的期望转矩,降低该转矩围绕负载转矩的振动幅度,进而保证转速稳定,同时立即减小参数KP和KI,防止转速出现超调和较大的振荡,而当系统完全稳态后,3个参数均处于较小数值范围内,来为后续的转速调节做准备。正是这样的自适应调整3个参数,才使得该模糊PID调节器构造出的转速闭环控制在保证较快的输出速度响应的同时,尽可能的逼近给定转速的设定值,而不会超过该设定值。同样,对于图7(b)中所呈现的小给定转速下抵抗大幅度负载扰动的过程,模糊PID调节器依然表现出参数自适应调整状态,该调整过程如图9所示,当0.2 s负载从9 N·m突减至1 N·m时,KP和KI同时增大,以迫使该调节器快速抑制因力矩失衡导致的转速快速上升,而KD的增加明显小于前2个参数,以避免转速振荡又不影响该调节器的快速性,到了抵抗负载扰动的后期,即过了0.2 s,KD开始发挥主要调节作用,其数值明显增大并变化显著,同时KP和KI明显回落衰退来削弱其影响力,以避免转速回稳前剧烈变化或振荡,当转速重新回到稳态时,3个参数也重新回到较小数值范围内准备下一次的调节。
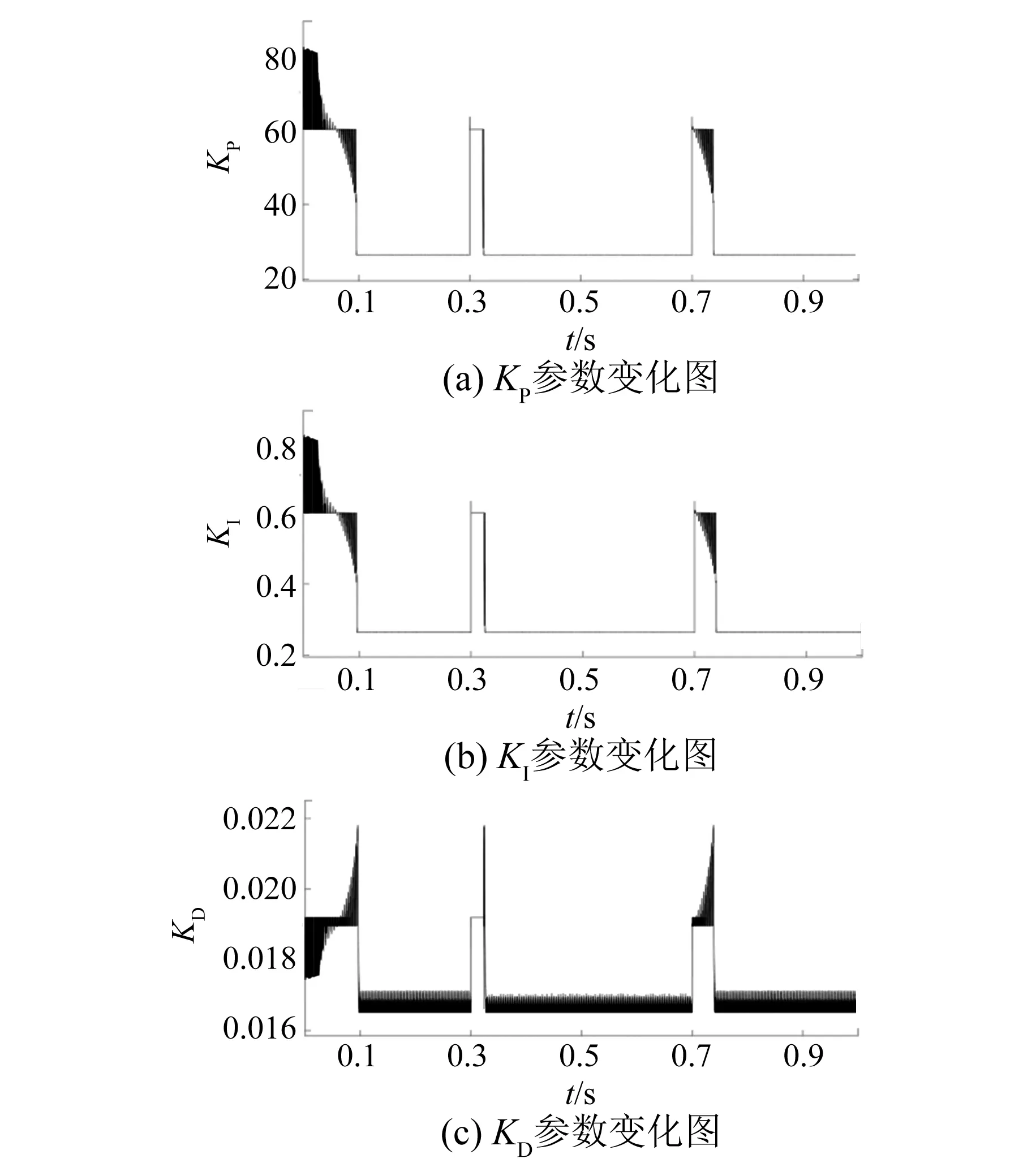
图8 给定转速变化时模糊PID调节器3个控制参数
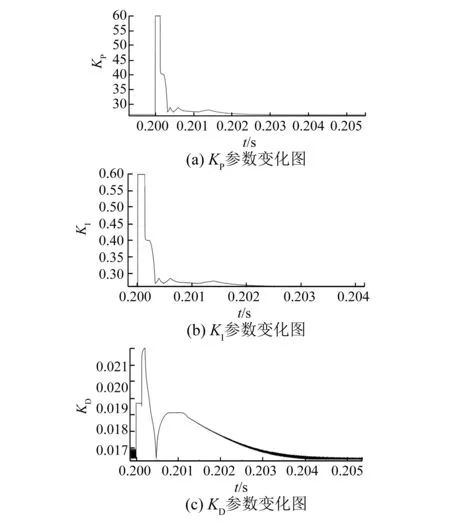
图9 负载扰动过程中模糊PID调节器3个控制参数
4 结 语
针对SRM转速这样的强非线性被调量,本文提出了一种解决其调节器参数的方法。通过将模糊控制和PID控制结合起来,构成模糊PID调速调节器,利用模糊推理运算实现了其中的比例、积分、微分3个参数的自适应调节,能够更好地适应SRM转速的非线性变化。与传统PI和无PI环节的模糊控制下的仿真试验对比,结果表明,本文提出的转速模糊PID调节器既克服了传统的固定参数PI调节器的转速超调与振荡问题,又解决了单纯运用模糊的调节器转速响应慢、调速误差大的问题,提高了SRM在整个调速范围内的调速性能。
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
四川冶金(2018年1期)2018-09-25
通信电源技术(2016年1期)2016-04-16
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
电机与控制应用(2015年3期)2015-03-01
