无人防空武器的发展及研究综述
2021-12-20 07:21杨维王越刘学超赵凯薛鹏张博
火炮发射与控制学报 2021年4期
杨维,王越,刘学超,赵凯,薛鹏,张博
(西北机电工程研究所,陕西 咸阳 712099 )
陆基近程末端防空武器主要承担要地防空和伴随掩护地面部队作战时,打击武装直升机、无人机和低空、超低空突防的精确制导武器,作用不言而喻。未来作战向非接触、非对称、零伤亡变革,从阿富汗战争到伊拉克战争,地面无人系统进入战场的局面已经确立,促使陆基近程末端防空武器装备更多地向信息化、智能化、无人化方向发展,无人防空武器具有持续行动能力强、人员伤亡少、长期无人值守等特点,无疑是转型发展的重要角色,可用于快速机动、远程侦查、情报处理和火力打击等作战和支援任务。
1 无人防空武器的发展现状
以美国、俄罗斯等为代表的国家在无人化、智能化方面很早就投入了人力、物力和资金,均形成了各自不同特点的无人武器装备[1]。以下分别从地面无人装备、近程防空装备两方面阐述国外研究现状。
1.1 地面无人装备
美国研制了“黑骑士”、“魔爪”系列地面无人装备,其中“黑骑士”无人装备具备30 mm速射炮火力系统、全地形通过能力、全频谱感知器组、完善的战术数据链以及先进的人工智能指挥系统,如图1所示[2]。俄罗斯军工企业推出了11种不同战斗全重级别的地面无人装备,其中“天王星”-9无人装备配备了1门用于防御地面和低速飞行的空中目标的30 mm 2A72自动炮,1架打击轻型装甲目标的7.62 mm同轴机枪,4枚9M120反坦克导弹,可模块化换装4发便携式防空导弹,操控人员在指挥车上对“天王星”-9无人车实施操控,目前该战车已在叙利亚战场进行了成功应用,如图2所示[3]。


1.2 近程防空武器
美国“复仇者”近程自行防空武器系统外观如图3所示,该系统将两个四联装“毒刺”导弹发射装置安装在多用途车辆M998“悍马”上,并配有红外及光学探测跟踪系统,具有迎击目标能力,用于摧毁近距离飞机和直升机。具有自动的目标威胁判断及行进间射击的能力,采用模块化设计,除采用“毒刺”导弹外,还可与其他便携式导弹集成。

俄罗斯“潘泽尔”-S1弹炮结合防空系统[4]外观如图4所示。该装备采用德国MAN SX45卡车底盘,火力包括两门2A38M式30 mm火炮和配置在炮塔两侧的各6枚防空导弹,发射SAM导弹拦截斜距为20 km、高度为15 km内的空中目标,发射高毁伤概率炮弹拦截斜距为4 km、高度为3 km内的空中目标。

2 无人防空武器的发展趋势
2.1 重点提升自主性能,加强态势感知能力
无人装备现阶段主要是以远程遥控为主,存在两个方面的问题:一方面是需要操作人员时刻关注平台与周边环境状态,操作人员的负担较重;另一方面,远程遥控对于通信的带宽以及实时性具有较高的要求,同时对通信的安全性与稳定性要求也较高。无人防空武器将沿着远程遥控控制到部分功能自主直至全自主的路线发展[5-6]。其中,半自主以及全自主方式下通过内部以及外部传感器实现对环境以及自身状态感知,借助决策系统将任务分解至规划层与控制层,实现无人防空武器的自主行为。
2.2 提高信息处理能力和快速反应能力
对于防空装备而言,即要满足对高速目标打击的需要,同时又满足对多批次攻击防御的需要,因而,通过不断优化火控模型,提高解算速度及精度,提升响应能力。其中,特别是信息处理向多源集成化和高速化发展。主要体现在,一是多源信息融合、信息处理集成化;二是采用高处理速度器件、运用先进的网络架构和通信总线,提升信息处理能力和速度;三是应用先进的计算机与网络技术,对信息处理软硬件进行自主开发,提升系统的可控性、安全性。
2.3 集成多类型防空武器对抗多种类目标威胁
现代反空袭作战的经验教训表明,在面对复杂战场环境下的多种类目标威胁,单一防空武器已不能支撑现代防空作战任务。低空突防目标类型主要包括武装直升机、巡航导弹和无人机群等。通过远近分层拦截来袭目标,光电、电磁压制与干扰等软杀伤方式可使这些空中目标的控制系统、通信系统、动力系统等暂时失效,但无法彻底毁伤目标,因此防空导弹、火炮、机枪为主的硬杀伤手段并不能缺失[7]。
3 无人防空武器的系统组成及操控方式
3.1 系统组成
无人防空武器由无人机动平台、任务载荷系统和远程操控系统组成,如图5所示。
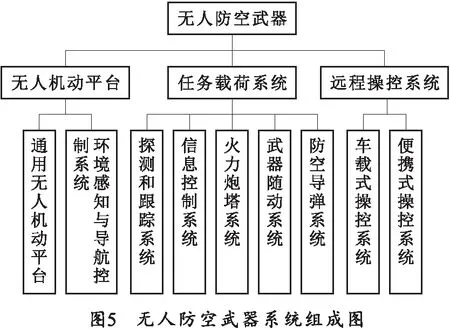
1)无人机动平台:采用通用无人底盘,集成环境感知与定位导航系统,并为车载各系统设备提供承载、能源和信息支持,采用高度集成化、模块化的设计理念,其结构形态表现为双侧设置动力-行动一体化的高机动系统模块,不仅具备高通过性能,还能够为中部的任务模块提供良好的缓冲隔振与安全防护。
2)任务载荷系统:集成探测和跟踪系统、防空导弹系统、火力炮塔系统、信息控制系统和武器随动系统,主要完成对来袭目标的预警探测、跟踪识别、火控解算、武器调转控制、导弹和火炮发射控制等。
3)远程操控系统:由车载式操控系统和便携式操控系统组成,能够接入有人/无人协同作战指挥系统,可通过车载式或便携式操控终端实现对无人车的远程控制,可自动获取并上传车辆状态信息、位置信息、环境信息、目标信息、任务载荷状态等信息。
3.2 操控方式
无人防空武器具有遥控式、半自主式和有监督的自主式3种等级的操控方式[8],以满足不同任务复杂度、行驶环境复杂度和无人车智能化水平下的控制需要。
1)遥控式:主要依靠人的智能和经验来操控无人底盘和任务载荷,在这种控制模式下,无人防空武器的每个机动动作、每个功能的启停都完全依靠操控者输入的动作级指令。在任务执行过程中,无人车向操作者实时反馈环境信息和车辆状态信息。
2)半自主式:将人类智能和机器智能融合在一起,共同参与无人防空武器的控制。在这种控制模式下,操作者并不直接向无人防空武器发送动作级控制指令,而是通过远程操控系统输入更高层次的行为级指令,无人防空武器的行为理解单元根据本车当前反馈信息,由行为级指令生成一系列动作级指令。
3)有监督自主式:是一种人机智能融合的无人防空武器操控模式,是比半自主式更上层的操控模式,充分发挥无人防空武器的主观能动性。在该模式下主要依靠机器智能来理解任务并操控无人防空武器。在任务执行过程中操作者只起到监督的作用,必要时对无人防空武器的行为进行人工干预。在有监督自主模式下,操作者只需给出宏观的任务描述或关键任务信息,由无人防空武器任务理解单元对任务级指令进行理解并生成行为级指令。无人防空武器即可根据行为级指令,并结合环境感知信息和平台状态信息,周期性生成动作级控制指令。
4 无人防空武器的控制架构
无人防空武器控制结构如图6所示,采用分层递阶控制架构[9-10],共分为4层,从上到下分别是远程操控层、任务理解与决策规划层、任务载荷控制层和底盘控制层。
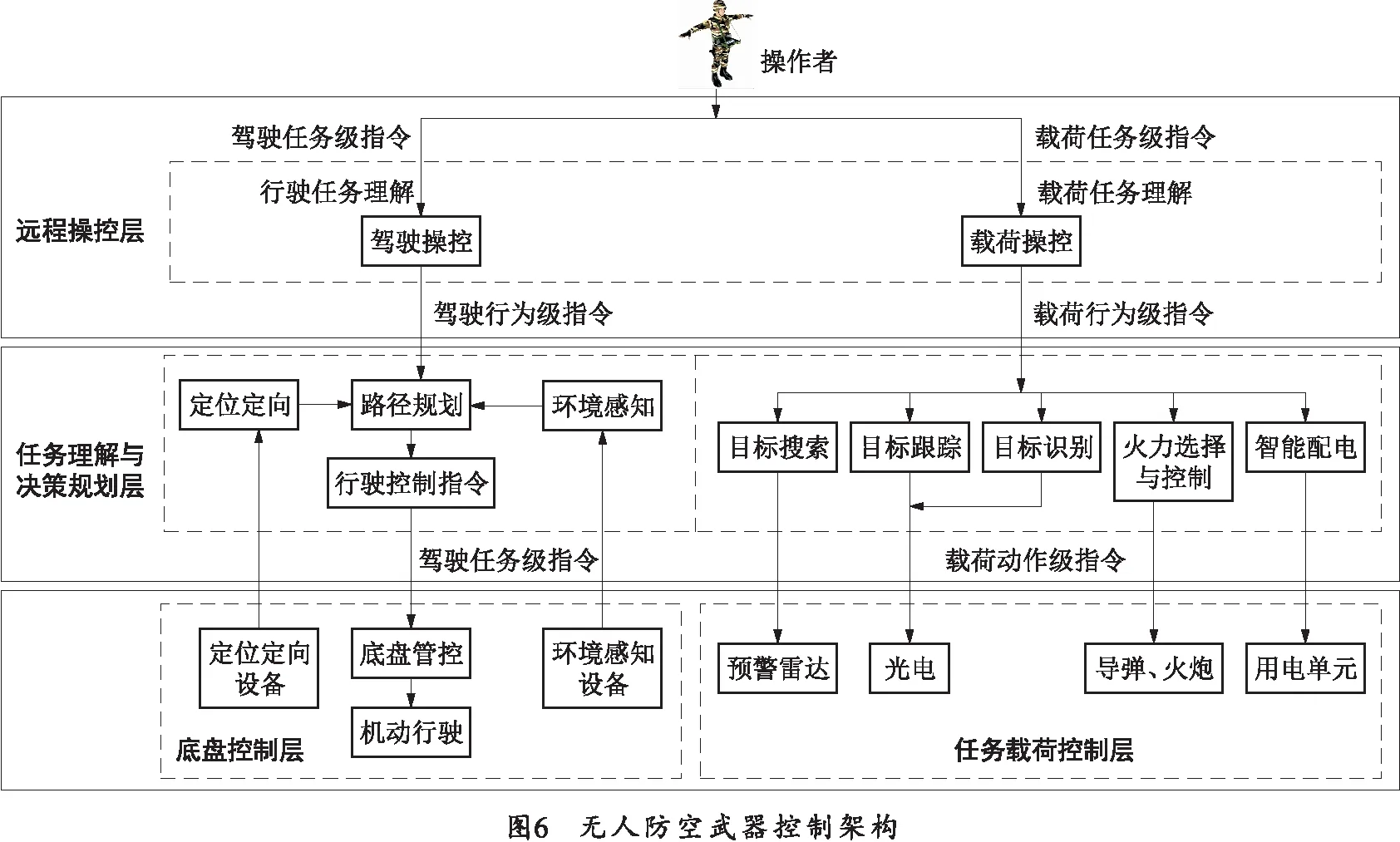
远程操控层是无人防空武器控制架构的顶层,可根据操控方式的不同,通过人机交互界面,输出动作级指令、行为级指令和任务级指令,实现对无人底盘和任务载荷的操作控制。其中行为级指令和任务级指令输出至任务理解与规划层,动作级指令直接输出至底盘控制层和任务载荷控制层。
任务理解与规划层是无人防空武器控制架构的核心控制层,对上接收远程操控层输出的任务级指令和行为级指令,将其分解为无人底盘机动行驶和任务载荷防空作战具体动作(如目标搜索、目标识别、目标跟踪、火力打击、智能配电等),并发往下一层。
在遥控模式下,远程操控层的驾驶操控模块直接与底盘管控模块发生信息交互,通过对无人防空武器的直接运动控制实现远距离的操作控制;在半自主和有监督自主模式下,机动行驶方案经由行驶任务理解模块分解后生成,实现自主机动。
底盘控制层根据自主机动和遥控驾驶指令,协调控制底盘的转向、驱动、制动与档位,实现精确的平台运动控制。
任务载荷控制层在遥控模式下可接收执行远程操控层发送的动作级指令,执行相应任务。在半自主模式和有监督的自主模式下接收并执行任务理解与规划层分解后的动作级指令,执行相应任务。
从图6看出,无人防空武器所采用的分层递阶控制架构控制结构为多模式的人机智能融合提供了可能,远程操控系统不仅可与底盘和任务载荷有直接的控制指令交互,还可通过智能化的任务分解与行为规划,为人机智能融合的多模式(遥控、半自主、有监督的自主)共融无缝切换提供基础。
5 无人防空武器的关键技术分析
5.1 总体设计及优化匹配技术
为满足无人防空武器的作战使用要求,上装综合集成了防空导弹、小口径高速射火炮武器等火力单元、雷达探测和光电跟踪单元、车载通信单元及随动控制单元,需在有限的空间紧凑布置大量机械电子设备,多火力结合后的系统配置复杂。根据系统组成及各分系统和单体的技术特点,以充分发挥各分系统和单体效能、满足无人防空武器功能性能为目的,进行总体结构布局、控制流程的详细分析,合理进行功能划分和指标分配。通过轻质高强度材料应用和刚强度优化设计,实现武器转塔的集成和轻量化,减轻各结构件和电气箱体质量和体积;将雷达、光电一体化集成设计,共用复合搜索跟踪伺服平台,减少体积和质量。将全车信息控制、数据处理、任务理解与决策、火控解算、随动控制综合集成到信息一体化处理机,将配电、驱动控制、火力控制综合集成到任务载荷驱动控制箱,降低了箱体数量、质量和体积。同时完善电磁兼容性、人机环、安全性、可靠性和维修性等方面的设计,实现无人防空武器的总体最优化设计[11-12]。
5.2 多类型目标精确打击技术
无人防空武器应具备对武装直升机、巡航导弹、轻小型无人机等多类型目标打击能力,为充分发挥不同种类防空武器的优势,取长补短,在任务载荷上集成防空导弹和小口径高速射火炮武器。系统组成复杂,影响多类型目标精确打击的因素主要包括光电跟踪精度、雷达跟踪精度、射击诸元解算精度、随动跟踪精度、整车刚强度、导弹精确打击技术,每个环节均影响无人防空武器的精确打击能力。例如目标高精度跟踪技术[13],通过采用交流力矩电机,减少传动环节,提高平台结构件的刚度及机械谐振频率,避免结构谐振频率对环路伺服带宽的限制;采用信号滤波合成的高精度前馈控制方法,提高了光电搜索跟踪系统的视轴稳定和跟踪精度。由于篇幅有限,这里对其他提高目标精确打击的技术环节不再逐一分析。
5.3 复杂战场环境下目标智能识别与决策技术
复杂战场环境下目标智能识别与决策技术主要包括低空目标识别技术[14]、弱小目标跟踪技术和智能打击决策技术。在目标检测跟踪方面,通过在传统的目标检测跟踪算法中增加目标在线学习模块,可在跟踪过程中实时进行训练和分类判断,提高跟踪的抗干扰能力。在目标识别方面,采用目标局部区域图像超分辨率技术、基于卷积神经网络算法,在保证目标细节的同时,将原有分辨率提升,输出目标坐标位置和目标类型,实现比传统识别算法更高的检测精度、更低的虚警率、更好的适应性。在智能决策方面,采用基于深度、强化学习的协同攻防动态决策解决方法,建立协同攻防动态多序列决策强化学习训练模型,实现协同攻防决策自主化。
5.4 自主机动技术
无人防空武器要实现一系列的自主驾驶行为,涉及到对外部环境的精确感知、对自身的精确定位以及智能化决策控制。在野外环境条件下,对复杂地形进行分析是关键,分析三维地形几何特征、地形覆盖、检测并对可能是障碍的地形分类,评估各种地形的可通过性。同时还需要解决恶劣气象条件和光照条件对外部环境的准确感知与理解。采用双目视觉与激光雷达相融合的障碍检测技术、可见光图像增强技术、利用机器学习方法进行地形地貌的分类技术、多源信息融合的环境自适应定位状态估计技术、复杂环境和不确定条件下的自主机动行为决策与高精度控制技术等实现无人防空武器的自主机动。
5.5 远程操控技术
远程操控技术主要针对无人机动平台和任务载荷的控制需求,对无人防空武器远距离操控、多通道信息交互、多平台集成操控等进行研究,开展指挥控制体系结构、人机协同任务规划、多模式人机交互与态势监控等技术研究,实现对无人防空武器任务规划、自主/遥控驾驶、任务载荷操作。
6 结束语
无人防空武器是防空武器装备由机械化向信息化、智能化发展的必然产物,也是各国装备研究技术水平的重要标志。总体而言,我国在防空武器装备的无人化发展落后于技术先进的国家。为此,应抓住机遇,推动防空武器的无人化、智能化技术发展,促进新技术领域的开拓,实现陆军武器装备跨越式发展。
猜你喜欢
水上消防(2022年2期)2022-07-22
中南大学学报(自然科学版)(2022年5期)2022-06-26
军事文摘(2022年11期)2022-06-24
军事文摘(2022年11期)2022-06-24
小哥白尼(军事科学)(2022年2期)2022-05-25
航天器工程(2021年5期)2021-10-15
舰船科学技术(2021年12期)2021-03-29
军民两用技术与产品(2021年10期)2021-03-16
北京航空航天大学学报(2020年3期)2021-01-14
学校教育研究(2020年11期)2020-06-08