
并联式造船喷涂机器人的设计与仿真
2021-12-21 08:14王东洋潘宇晨邓志宁
装备制造技术 2021年8期
王东洋,潘宇晨,邓志宁
(1.广西科技大学机械与交通工程学院,广西 柳州 545000;2.北部湾大学机械与船舶海洋工程学院,广西 钦州 535011)
船坞内对船舶外板的喷涂主要依靠人工搭载高架车完成喷涂工作,这不仅对工人造成身体上的伤害,而且喷涂效率也不能保证。国内外学者针对这个问题提出并研究了三种形式船舶外板喷涂机器人构型:爬壁式机器人[1]、桁架轨道式机器人[2]、高架车式[3],都需要搭载喷涂执行机构完成对船舶外板的涂装任务。并联机构是一种基座和动平台之间由两个或两个以上的独立运动链相连接,具有两个或两个以上自由度,且以并联方式驱动的机构[4]。因其具有精度高、结构紧凑、刚度高、承载能力强等优点,引起了国内外学者的广泛研究和关注。但并联机构在船舶外板喷涂领域的应用等的研究相对较少。
针对船舶建造过程当中船体外板喷涂是一道工作量大、耗时长的工序,且现阶段仍依靠人工去完成的问题,设计了一种三自由度并联式造船喷涂机器人。该喷涂机器人由三个控制电机驱动,能实现喷枪空间内两平动一转动的运动。从船舶外板喷涂工艺作业特点出发,对造船喷涂机器人进行运动学仿真,获得了喷涂机器人工作时喷枪的位移、速度、加速度等运动学规律。结果表明,该并联式喷涂机器人能实现船舶外板喷涂的各项运动学要求。
1 造船喷涂机器人机构构型
造船喷涂机器人结构简图如图1 所示,喷涂机器人的两条支链分别与动平台和静平台相连接,驱动副位于A11、A21和B22点。支链1 为-PRS-支链,且在平面O-yz内运动。R 副为驱动副,不仅可以使机构正常实现两平移一转动,而且能更好的控制机构。支链2 中含有一个4R 平面闭环子链和一个2R 平行子链转动副[5]。涂装喷枪为动平台,与支链1、2 末端运动副相连接。图2 为并联式喷涂机器人三维模型图。
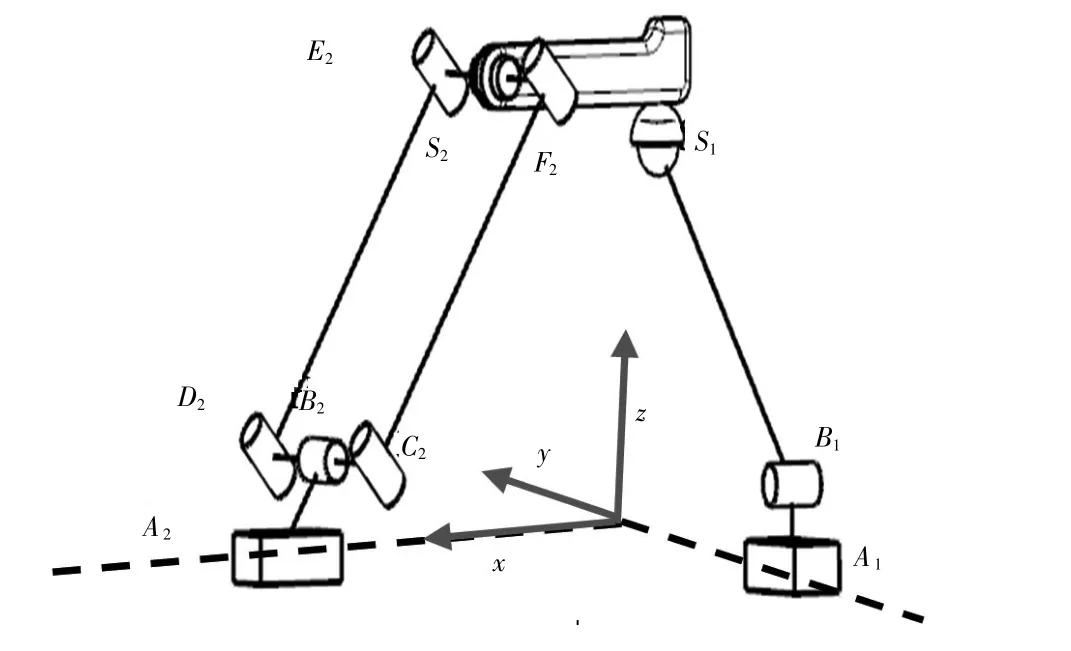
图1 并联式喷涂机器人结构简
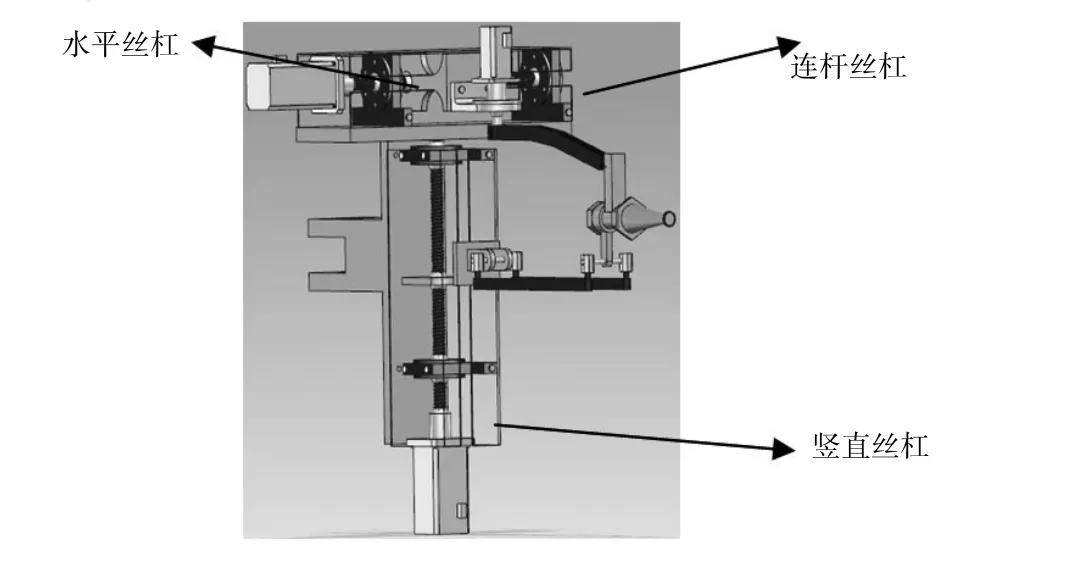
图2 并联式喷涂机器人三维模型
2 船舶外板喷涂工艺
现阶段船坞内的外板的喷涂作业区为舷顶列板、舷侧外板、船底板,如图3 所示。外板表面喷涂主要是工人搭载高架车手持喷枪沿预定轨迹进行喷涂作业,且喷枪的运动轨迹一般为“Z”或倒“Z”型[6-7]。由于船坞内的外板的喷涂作业特点是作业区较长、高度较高、喷涂面积大、工作面相对复杂,这就决定工人工作环境是高空作业、需长时间站立和工作空间相对狭窄等。
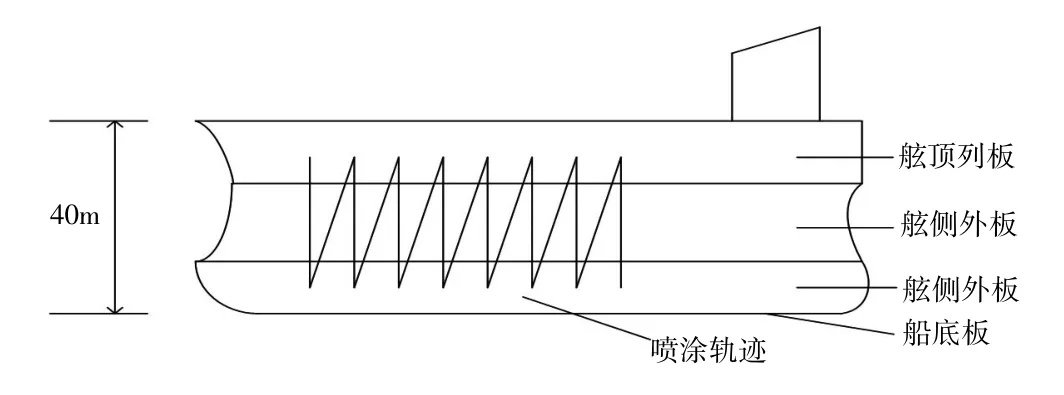
图3 船舶外板人工喷涂轨迹和区域
3 造船喷涂机器人运动仿真
将建好并联式喷涂机器人虚拟样机导入软件中,根据船舶外板喷涂工艺的要求,对喷涂机器人的运动进行仿真分析。为提高仿真分析的效率和准确性,忽略非必要的零件(螺栓、螺母件等)如图4 所示。接着对样机进行约束添加、材料的定义等,如图5所示。
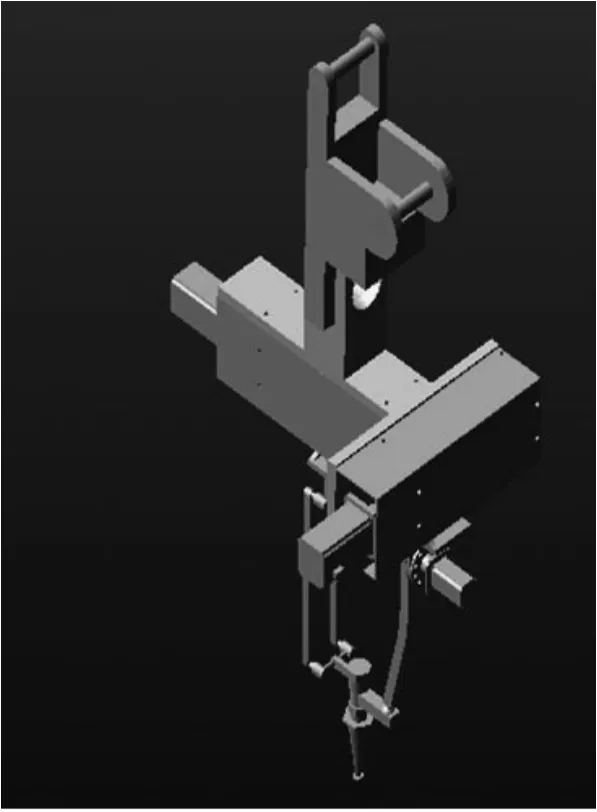
图4 中虚拟样机
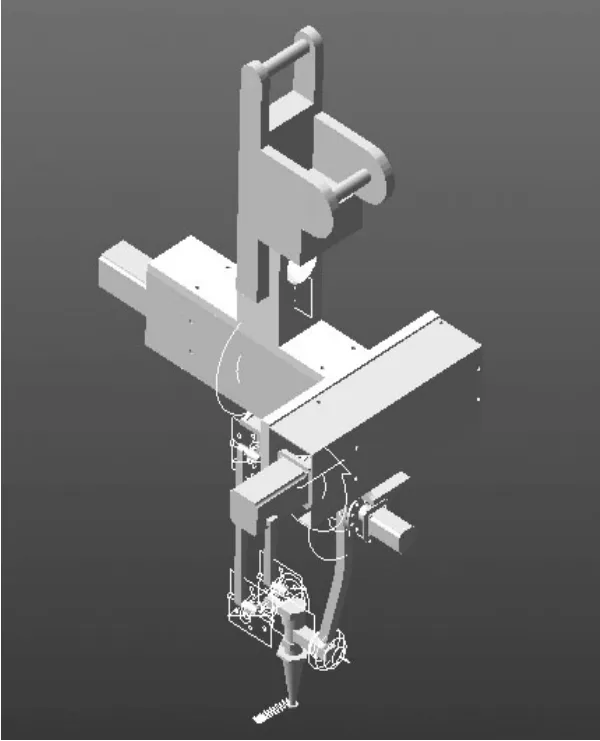
图5 样机约束的添加
3.1 驱动添加
依照喷涂工艺要求,并联式造船喷涂机器人喷枪执行的轨迹为空间倒“Z”字型。根据执行机构的运动规律,添加合适的运动参数,具体驱动参数函数如下:
竖直丝杠:100*SIN(40*time)
水平丝杠:3600d*time
连杆丝杠:30.0d*time
3.2 仿真分析
对动平台添加驱动后可进行实际仿真,通过仿真软件的后处理模块可以得到造船喷涂机器人喷枪的运动,最终分别得到喷枪的位移、速度、加速度、轨迹等运动学参数。
通过观察图6、图7、图8 可知,喷枪末端在1.5 s的工作周期当中,位移变化320mm,位移变化呈现“Z”字型,和末端规律相符合。喷枪末端速度和加速度由于喷枪的末端的倒“Z”字型轨迹呈现波动趋势,这符合预定的运动情况,为以后改变不同的驱动来达到不同的运动轨迹和运动速度提供理论基础。
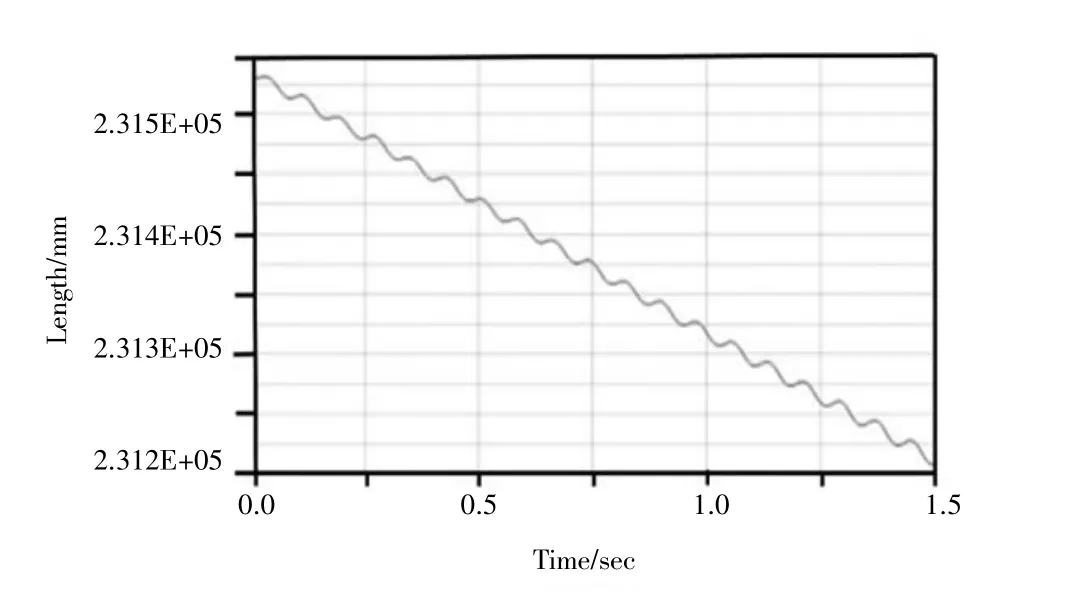
图6 喷枪位移
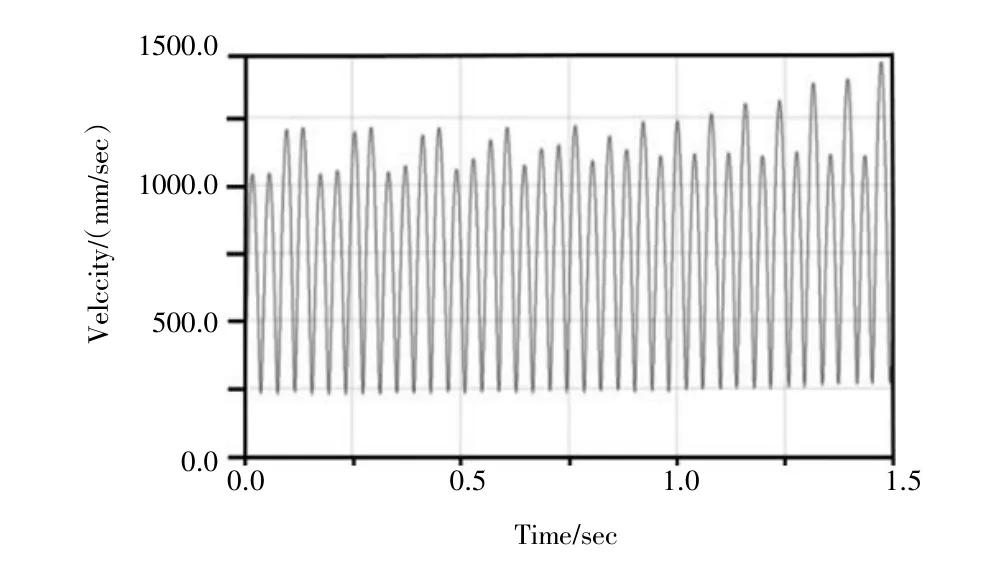
图7 喷枪速度
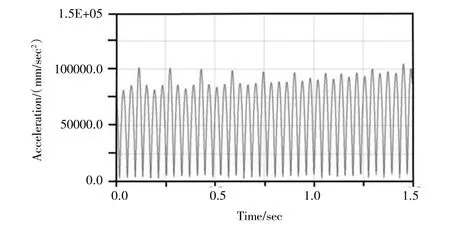
图8 喷枪加速度
4 结语
本文根据现有船舶外板喷涂的现状与问题,设计了一种的并联式造船喷涂机器人。首先对船舶外板喷涂进行说明,进而根据船舶喷涂工艺要求对该造船喷涂机器人进行仿真分析,并给出仿真结果。通过对机器人运行曲线的研究证明了该并联式造船喷涂机器人满足设计要求。
猜你喜欢
能源工程(2021年1期)2021-04-13
模具制造(2019年10期)2020-01-06
模具制造(2019年10期)2020-01-06
模具制造(2019年4期)2019-06-24
酒·饮料技术装备(2018年1期)2018-04-28
中国有色冶金(2018年1期)2018-02-01
现代制造技术与装备(2015年4期)2015-12-23
汽车维护与修理(2015年1期)2015-02-28
北京航空航天大学学报(2014年1期)2014-12-19
中国机械工程(2012年15期)2012-07-25
