基于改进的YOLOv3实现手势识别的人机交互方法
2021-12-22 09:18刘兆峰冯柯翔王晓薇
天津科技大学学报 2021年6期
苏 静,刘兆峰,王 嫄,冯柯翔,王晓薇
(天津科技大学人工智能学院,天津 300457)
计算机视觉技术正逐步进入人们日常生活,并推动着人机交互领域的升级和进化.基于手势的人机交互中一个非常重要的环节是手势识别.目前已实现的手势识别算法包括基于模板匹配、基于数据手套以及基于隐马尔科夫模型等.但是,这些算法存在工序复杂、设备昂贵、计算量大等问题,导致训练模型的泛化能力差,因此很难达到实时检测的目的.基于计算机视觉的手势识别方法可以有效克服传统方法的弊端,YOLO(you only look once)算法的出现,在目标检测领域取得极佳的检测效果[1].
目标检测是一个从深度学习快速发展中受益匪浅的领域,近年来人们实现了许多目标检测算法,包括Faster RCNN算法[2]、SSD算法[3]、Mask-RCNN算法[4]和RetinalNet算法等[5].YOLO算法是目标检测中one-stage的开山之作,开辟性地将物体检测任务直接作为回归问题处理,直接将候选和检测两个阶段合而为一,“只需要看一眼”就可以知道在每张图片中有哪些物体以及物体的位置.相较于之前的物体检测方法,YOLO算法在保证一定的检测准确率的前提下达到了实时检测的速度.
在实验中将原始版本的YOLOv3算法[6]应用于手势实时识别领域,虽然可以取得较好的效果,平均准确率(mAP)达到96.36%,准确率为98.06%,但召回率仅为81.59%,在检测的精度和速度上还有一定的提升空间,并且由于训练集数量和GPU显存的限制,导致训练时间过长.
为了解决上述问题,本文提出对YOLOv3算法进行改进:首先,YOLOv3算法中的先验框是利用Kmeans[7]聚类算法在COCO数据集预计算定义,但由于目标检测结果往往需要缩放到原始尺寸,自定义数据集中目标对象的尺寸与COCO数据集的并不完全相同,因此需通过对所有标签的边界框进行重新聚类计算先验框,提高模型识别的准确率和召回率;之后,针对GPU显存的限制,采用在输入端进行Mosaic数据增强[8]的方式解决,通过随机选取4张图片进行随机缩放、随机裁减、随机分布的方式进行拼接,一次训练4张图片可以大大提高训练效率,个人电脑单GPU就可以达到很好的效果,并且极大缩短了训练时间;最后,在输出端调整损失函数,结合IoU、GIoU、CIoU、DIoU[9]定义GCDIoU损失函数,加快训练过程中的位置损失的下降速度,提高模型的训练效率.
1 目标检测算法
YOLOv3是完全卷积网络(fully convolutional networks for semantic segmentation,FCN)[10],有75个卷积层,还有跳跃连接层和上采样层,没有池化层,使用步长为2的卷积层对特征图进行采样.作为完全卷积网络,YOLOv3是可以处理各种输入图像的大小,但在实际实验中还要保持一个恒定的输入大小,其中一个很大的问题是,如果想进行批处理图像,那么就需要固定图像的宽高,这是将多个图像连接成一个大批处理所需要的.
网络通过步长因子对图像进行下采样.例如,如果网络的步长是32,则大小为416×416的输入图像将产生大小为13×13的输出图像.一般来说,网络中任何一层的步长都等于该层的输出小于网络输入图像的因子.
在深度方面,特征图中有 S× S( B × ( 5+ C))个元素,B表示每个单元格可以预测的边界框的数量,每个边界框都有5+C属性,这些属性描述每个边界框的中心坐标、尺寸、对象性得分和C类置信度.YOLOv3为每个单元格预测3个边界框.
YOLOv3网络对输入图像进行下采样直到第一检测层,其中使用步长为32的层的特征映射进行检测,以因子2向上采样,然后与具有相同特征图大小的先前层的特征图连接.另一个检测层的步长为16,重复相同的上采样程序,并在步长为8的层进行最终检测.上采样可以帮助网络学习细粒度特征,这些特征有助于YOLOv3检测小物体.
网络在3个不同的尺度上进行预测,检测层用于对3种不同尺寸(32、16、8)的特征图进行检测.也就是说,当输入是416×416的情况下,模型在13×13、26×26和52×52的尺度上进行检测.
1.1 制作数据集
由于特定手势控制数据集的稀缺,导致互联网上暂时未有符合项目要求的公开数据集,因此实验中采用众包方式收集大量手势录像.对于通过使用摄像头和计算机视觉技术捕获的RGB手势录像,首先要将其按照10 帧/秒进行切分,然后按照YOLO算法数据集的格式通过CVAT进行人工标记手势区域,标注内容包括手势的类别信息以及位置信息.
标注工作完成后要对所有的标签进行K-means聚类处理,结果如图1所示.图1中:(a)为选择的5种手势图片数量,0—4分别代表鼠标的单击、双击、右键、上滑和下滑;(b)为通过K-means聚类算法得到的先验框,由于数据集中大部分都是手势box,所以表现为竖直框;(c)为手势位置在图片中的分布,空白部分为面部和胸前位置;(d)为box的宽高所占图像宽高比例分布,呈现线性相关性.
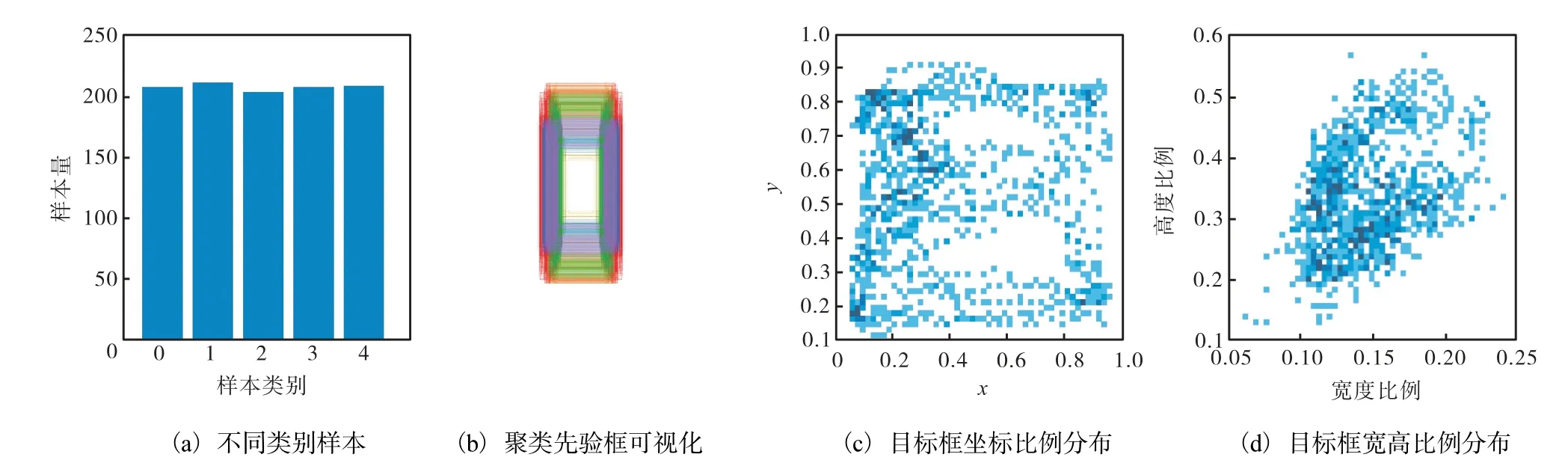
图1 K-means聚类处理结果 Fig. 1 Clustering results of K-means
1.2 数据增强
数据增强是由现有的、有限的训练数据通过变换创建新的训练样本,通过调整图像的参数推广到其他情况,允许模型适应更广泛的情况.用于手势识别的数据集并不大,因此采用了广泛的数据增强,包括几何畸变、光照畸变、色彩空间调整和图像遮挡等等.除此之外,在手势识别的项目训练中,由于手势大部分都是小目标,而YOLOv3针对小目标的检测效果并不理想,因此需要对数据进行一些处理. Mosaic数据增强是参考CutMix数据增强[11]的方式,但CutMix数据增强只使用了2张图片进行拼接,而Mosaic数据增强则采用了4张图片,实验在此基础上又添加了色彩空间的调整(图2),通过随机缩放、随机裁减、随机分布的方式进行拼接,并且随机添加边缘空白.
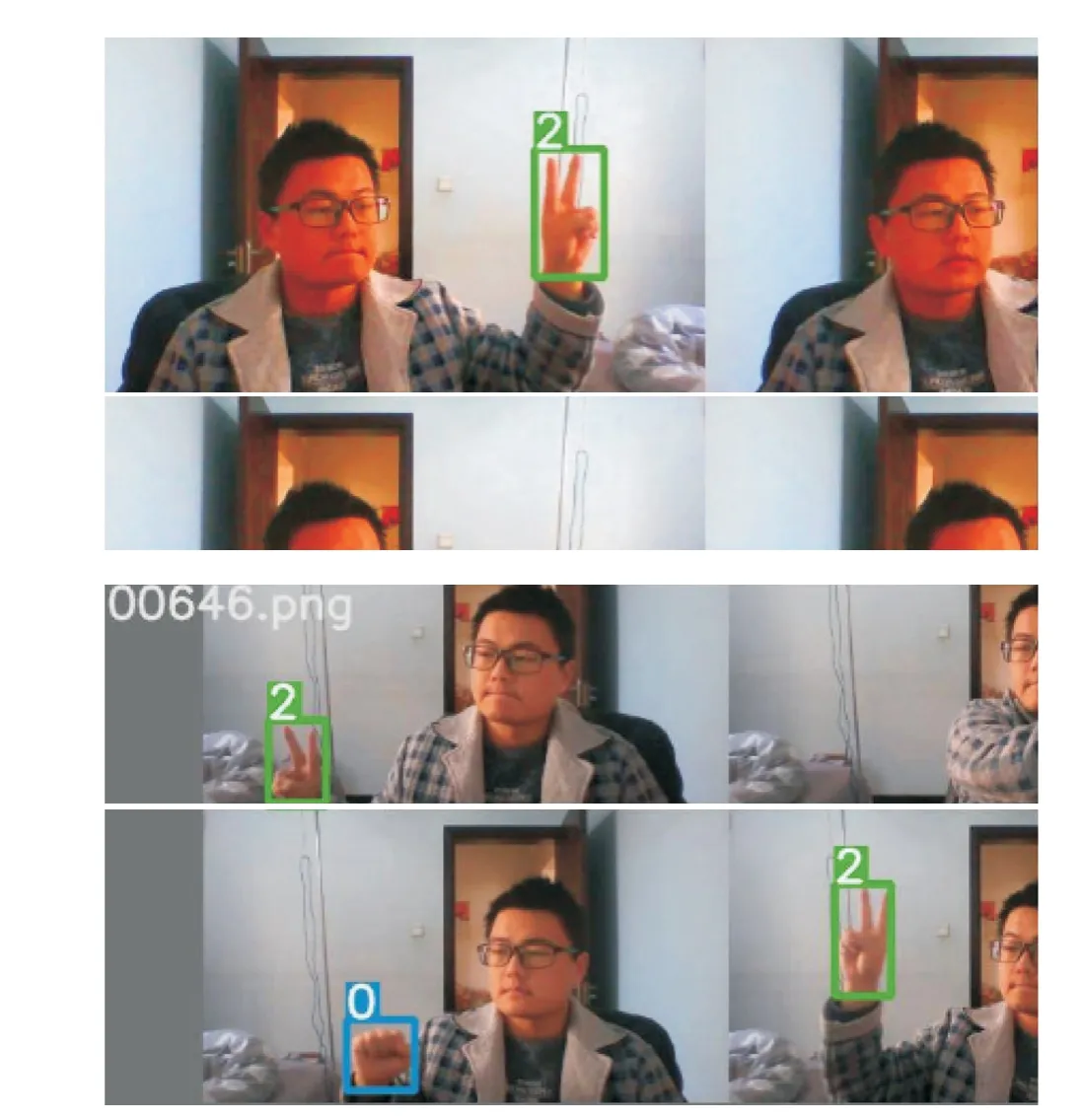
图2 Mosaic数据增强和色彩空间调整 Fig. 2 Data enhancement and color space adjustment
随机缩放增加了很多小目标,让网络检测效果更好,对小目标检测的准确率更高,并且通过Mosaic数据增强训练时可以直接计算4张图片的数据,使得小批次训练大小并不需要特别大,个人电脑的GPU就可以达到很好的效果.
1.3 损失函数
IoU_Loss[12]由旷视科技提出,把4个点(x,y,w,h)构成目标的真实边界框(box)看成整体进行回归,对两个box计算其交并比,但IoU_Loss有两个缺点:第一,当预测框和目标框不相交时,IoU=0,不能反映距离的远近,此时损失函数不可导,因此无法优化两个box不相交的情况;第二,如果预测框和目标框的大小确定,只要两个box的相交值是确定的,其IoU值就是确定的,但并不能反映两个box是如何相交的.
基于IoU存在的问题,一个好的位置损失函数应该考虑重叠面积、中心点距离、box宽高比这3个重要的几何因素.
GIoU损失函数是通过IoU减去两个边界框闭包区域中不属于两个框的区域占闭包区域的比重表示.DIoU和CIoU损失函数是将目标与先验框之间的距离、重叠率、尺度和box宽高比均考虑进去,使得目标框回归变得更加稳定,不会像IoU和GIoU一样出现训练过程中发散等问题.
综合考虑各种IoU的计算优劣势,定义GCDIoU_Loss为损失函数 LGCDIoU_Loss进行优化.
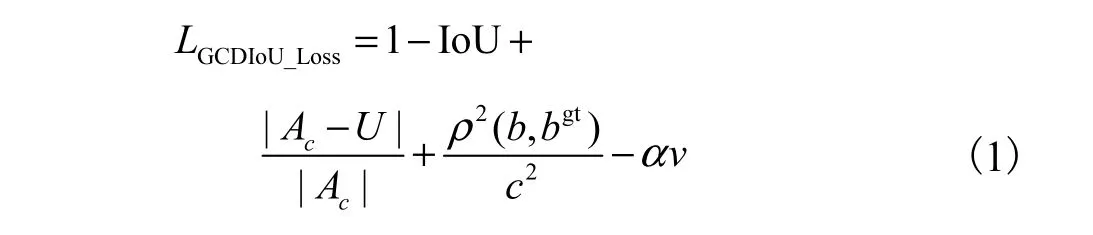
式中:b和 bgt分别为预测框B和预测框Bgt的中心点,ρ(·)为欧式距离,c为预测框B和预测框Bgt的最小外接矩形的对角线距离,v用来度量宽高比的相似性.
1.4 pynput鼠标控制
训练的模型可以通过调用电脑的默认摄像头获取图像,并返回屏幕中识别的手势位置和标签,然后通过pynput库进行人机交互.
pynput库是一个可以控制和监听输入设备,通过pynput.mouse包含用于控制和监听鼠标或触控板的类,通过pynput.keyboard包含用于控制和监听键盘的类,并且可以通过设置环境变量将其值作用于适合当前平台的键盘或鼠标后端.
为了确保在Windows上监听器和控制器之间的坐标一致,当系统缩放比例增加到100%以上时,最新版本的Windows支持运行旧版本的应用程序,这使旧的应用程序可以缩放,尽管比较模糊,但这种缩放导致鼠标监听器和控制器的坐标信息不一致,监听器接收物理空间坐标,但是通过控制器设计必须使用缩放的坐标.要解决以上问题,需要设置Windows应用支持定位精度DPI,并且这是一个全局设置,因此需要通过ctypes模块启用DPI感知.
pynput方法参考:click(button,count=1)表示在当前位置发出按钮单击事件,move(dx,dy)表示将鼠标指针从其当前位置移出多个像素,position表示返回鼠标指针的当前位置,press(button)表示在当前位置发出按钮按下事件,release(button)表示在当前位置发出按钮释放事件,scroll(dx,dy)表示发送滚动 事件.
2 实验结果及处理
2.1 实验结果
实验环境:Window 10、Intel(R)Core(TM)i7-7700HQ CPU@2.80GHz、NVIDIA GeForce GTX 1060 with Max-Q Design、Python 3.8、PyTorch 1.7.1、CUDA 10.2、cudnn 7.0个人电脑.
实验结果如图3所示.由图3可以发现,实验中所采用的方法得到了预期的效果.GCDIoU由于增加了包含预测框和真实框的最小矩形框,计算每个预测框之间的欧氏距离,并且综合考虑重叠率和宽高比,让模型加速收敛.迭代次数为100时,位置损失低于0.03,置信度损失低于0.01,分类损失低于0.01.最终检测的准确率为98.87%,接近100%.由于Mosaic数据增强人为制造了大量的小目标,提升了对手势检测的召回率,在迭代次数为100时,就已经稳定在99.98%.

图3 训练集实验结果 Fig. 3 Experimental results of training sets
2.2 IoU修改提升
对于深度学习的神经网络模型来说,损失函数的设计尤为重要,对比YOLO-V1和YOLOv3中的定位损失,采用的是平方和的损失计算方法,虽然可以考虑不同尺度对回归损失的影响,但没有考虑到位置坐标的相关性,并不能很好地反映预测框与真实框的重合程度.
通过结合IoU、GIoU、CIoU、DIoU定义的GCDIoU损失函数,充分考虑了预测框和真实框的重叠面积、中心点距离、宽高比,在训练过程中加快了位置损失的下降速度,以此提高模型的训练效率.如图4所示,GCDIoU的损失值相比于其他4种基本处于较低水平.
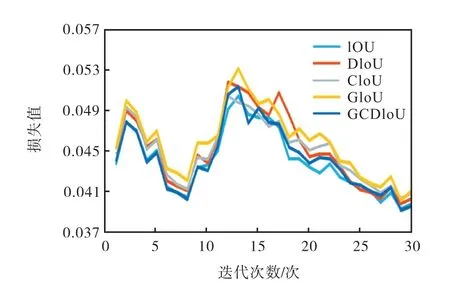
图4 不同IoU损失值下降对比 Fig. 4 Comparison of different IOU loss values
2.3 对比实验
为检测模型改进效果,实验中对比改进前与改进后模型在测试集的mAP值对比(图5),结果表明改进效果较好.
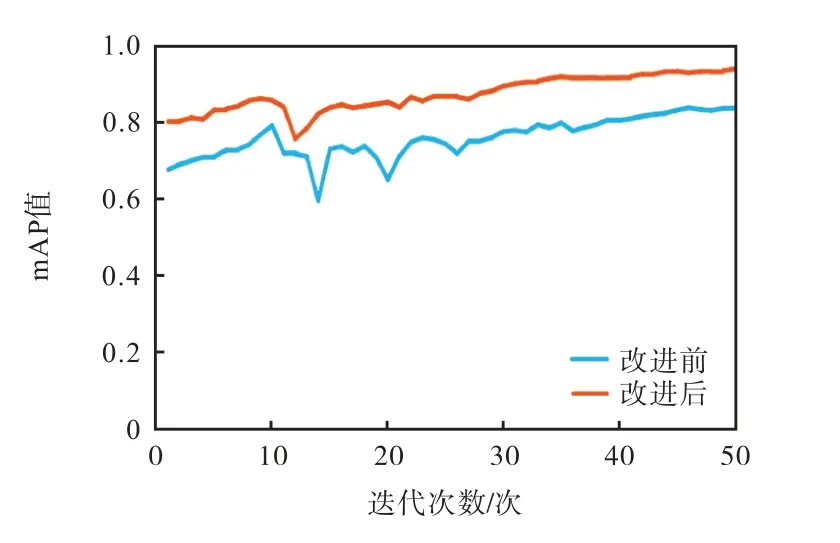
图5 模型改进前后测试集mAP值对比 Fig. 5 Comparison of mAP value of test sets before and after model improvement
3 结语
本文提出了一种基于改进的YOLOv3实现的手势实时识别人机交互方法.数据集通过对录像按照10 帧/秒进行切分获得图片,借助CVAT标注工具进行标注.底层特征提取器采用迁移Darknet-53模型,通过K-means聚类算法对先验框进行优化,训练时通过Mosaic数据增强提高手势检测准确率,最后通过训练出的模型结合pynput模块实现手势识别控制鼠标达成人机交互.改进后的人机交互方法在识别准确率、召回率和速度上都取得了很好的效果,可用于基于视觉手势交互场景的实时识别,对视频中的多目标手势进行快速、准确的识别.
人机交互方式的改进可以带来工作效率的提升,本文提出的手势识别与人机交互方法只是针对静态手势进行识别,对于视频中帧与帧之间的时序信息没有加以利用,未来改进的方向是识别和理解连续的、动态的手势.
猜你喜欢
福建师范大学学报(自然科学版)(2022年2期)2022-03-16
成都信息工程大学学报(2021年5期)2021-12-30
数学小灵通·3-4年级(2021年5期)2021-07-16
西安邮电大学学报(2021年1期)2021-04-19
红领巾·萌芽(2019年9期)2019-10-09
今日农业(2019年15期)2019-01-03
小学阅读指南·低年级版(2017年6期)2017-06-12
北京航空航天大学学报(2016年12期)2016-02-27
共产党员(辽宁)(2015年2期)2015-12-06
读者·校园版(2015年19期)2015-05-14