
基于相关法的超低膨胀玻璃声速测量
2021-12-22 05:35魏文卿张媛媛阮晓莉
无损检测 2021年11期
魏文卿,张媛媛,徐 涛,阮晓莉,刘 红
(1.中国科学院 光电技术研究所,成都 610209;2.中国科学院大学 光电学院,北京 100049)
超低膨胀玻璃因具有零膨胀特性,成为许多大型光学系统反射镜的主选基体材料[1-2]。玻璃制备过程中,内部TiO2含量分布的均匀性会影响其热膨胀系数(CTE)的均匀性,最终影响超低膨胀玻璃反射镜的热稳定性和光学系统的成像质量[3],因此,迫切需要对超低膨胀玻璃CTE的均匀性进行等级评估。常用的测量超低膨胀玻璃CTE的方法有顶杆膨胀仪法[4]、干涉法[5-6]和光弹性分析法[7-8],但它们均属于破坏性测量方法且测量过程费时、成本较高,不适合用于大型光学系统反射镜面板材料CTE均匀性的检测。为解决大型光学系统反射镜面板材料CTE均匀性的检测难题,HAGY等[9-10],VANBROCKLIN等[11]提出了一种通过测量超低膨胀玻璃的纵波声速来间接测量CTE均匀性的方法,该测量方法简单、快速、无损,需要解决的关键问题是高精度渡越时间(TOF)的快速估计。
目前,TOF的估计方法主要有阈值法[12-13]、过零点法[14]、峰值法[15-16]和相关法[17-19],其中,阈值法将回波幅值第一次超过设定阈值的时间作为TOF[20];过零点法与阈值法类似,只是将其设定的阈值用时间轴代替;峰值法将相邻回波幅值达到最大值时的时间差作为TOF[15],通常需要根据具体波形选择正向(或负向)峰值进行测量,该方法已被广泛运用到高频超声显微镜的声时测厚模块中[21]。以上3种方法都是根据信号的局部特征进行物理量测量的,测量结果严重依赖于局部信号特征,易受人为因素(如主观确定阈值)或噪声的影响。相关法是表征两个信号相似程度的方法,若两个超声回波信号波形较为相似,只存在时间和幅值上的差异,应使用相关法来获取两个信号之间的TOF[22]。该方法从全局信号出发,具有较强的噪声鲁棒性,被较多地运用于无损检测领域。
文章基于水浸脉冲回波法搭建了声速测量系统,结合被测材料的特性和超声信号特征,采用相关法开展超低膨胀玻璃声速测量的研究,测量结果为后续大尺寸超低膨胀玻璃CTE均匀性的无损评价奠定了基础。
1 声速测量原理
声速是超声波在介质中的传播速率,是评价材料的重要物理性能指标之一,通常采用脉冲回波法根据材料的厚度和TOF计算得到。相比于直接接触式测量,水浸法的声波发收比较稳定,重复性好,因此文章重点研究水浸脉冲回波法的声速测量。
1.1 一次底波测量法
由于界面的声阻抗差异,超声波通过耦合剂-水入射到被测材料中并传播到底面时,会在材料的表面和底面发生反射,利用探头可以接收反射的回波信号。一次底波法是利用表面反射波和一次底波的时间间隔来测量材料声速的。该方法将表面反射波相对于时基“0”点的时间记为t1,一次底波相对于时基“0”点的时间记为tB1,则有

(1)

(2)
式中:H为探头端面到被测材料表面的距离,即水距;c水为水的声速;d为被测材料的厚度;c材料为被测材料的声速。
一次底波与表面反射波的时间间隔Δt1可表示为

(3)
由式(3)可知,只要知道被测材料的厚度及表面反射波和一次底波的时间间隔,就能计算出声速。由于表面反射波是在水-被测材料(低-高声阻抗)界面形成的,一次底波是在被测材料-水(高-低声阻抗)界面形成的,因此这两个回波信号处于相反的相位,在确定Δt1时要做反相处理。
1.2 多次底波测量法
多次底波测量法是通过测量两次或多次底波的时间间隔来得到材料声速的方法,适用于衰减较小或厚度较小,且能够清晰显示多次底波的情况。将二次底波相对于时基“0”点的时间记为tB2,则有

(4)
二次底波与一次底波的时间间隔Δt2可表示为

(5)
从式(5)可看出,利用二次底波与一次底波的时间间隔同样能够计算出声速。由于一次底波和二次底波都是在被测材料-水(高-低声阻抗)界面产生的,所以这两个回波信号具有相同的相位,在确定Δt2时无需做反相处理。
在实际测量中发现,表面反射波的接收时刻难以被清晰准确地获取,且表面反射波与一次底波的相似性较低,在反向位置确定Δt1的精度较低。对比而言,一次底波与二次底波相似性较高,在同相位置确定Δt2的精度也提高,并且由于超低膨胀玻璃是一种均相、低衰减的材料,其多次底波位置比较明显且幅值较大,因此笔者采用多次底波法对其进行声速测量的研究。
2 基于相关法的声速计算
2.1 相关法的基本原理
电脉冲激励超声探头产生的超声波在被测试样中传播,传播至试样底部时被反射回探头形成回波信号。根据信号分析理论,不同回波信号之间的相关性或者相似性可用相关系数表示,利用相关法可以提取超声波在被测试样中沿传播方向的TOF。
假设有一对相关信号s1(t)和s2(t),存在一个系数k,可以使k·s2(t)无限逼近于s1(t),将两者之间的相似度表示为均方差ε,即

(6)
令k与ε满足

(7)
则

(8)
将式(8)代入式(6)可得
(9)
相对误差为

(10)
式中:R为s1(t)和s2(t)的相关系数。
R的计算式为
(11)
当|R|=1时,s1(t)和s2(t)完全相关;当|R|=0时,s1(t)和s2(t)完全不相关;当0<|R|<1时,s1(t)和s2(t)不完全相关,|R|越大,相关程度越大。
假设采集到的声波信号为s(t),对s(t)中不同的回波信号进行分割并记为s1(t)和s2(t),分别表示一次底波和二次底波信号,则两底波信号的相关系数可用式(11)表示,但由于存储在计算机中的回波信号是两个离散的信号数组,因此需要对其相关系数进行处理,得到

(12)
式中:n为信号数组的计算长度;i为信号数组中的位置。
2.2 相关法确定TOF的过程
截取超声测量信号中包含时间间隔的一段时域信号s(t),对其进行分割并标记s1(t)和s2(t)的n个离散点,表示为两个离散数据数组s1(1)s1(n)与s2(1+m)s2(n+m)。按照式(12)对两个离散数据数组进行相关性计算,得到相关系数数组,其中,相关系数的峰值Rmax所对应的横坐标采样点mmax即为一次底波信号与二次底波信号相关度最高时的时间点。假设超声信号的采样率为f0,则一次底波与二次底波的时间间隔Δt为
Δt=mmax/f0
(13)
下面用两个相关的衰减正弦函数形式的信号来仿真超声信号,验证TOF的相关算法,衰减正弦函数y(t)的表达式为
y(t)=βexp(-αt)sin(2πfct)
(14)
式中:α为正弦函数的衰减系数,α=9×106Np·m-1;fc为声波的频率,设为5 MHz;β为信号的幅值,原始信号与回波信号的幅值分别设置为1 V和0.5 V。
超声信号的采样率设为2.5 GHz,原始信号与回波信号的TOF设为6.8 μs。由此可计算出仿真信号的波形和相关系数曲线(见图1)。

图1 仿真超声波形及相关系数曲线
由图1可以看出,R存在一个非常明显的峰值,Rmax对应的横坐标为6.8 μs,即Δt=6.8 μs,而图1(a)中两列衰减正弦信号的时间间隔也为6.8 μs,计算结果与预先设置值相匹配,验证了相关法的准确性和可行性。
2.3 基于TOF的声速计算
通过相关法确定Δt后,测得试样的厚度d,最后按式(15)计算出被测试样的纵波声速cL。

(15)
3 测量系统及试验
3.1 测量系统
基于水浸脉冲回波法构建的声速测量系统外观如图2所示,该系统的主要规格参数如表1所示。

表1 声速测量系统的主要参数

图2 超声水浸脉冲回波法声速测量系统外观
该系统利用Olympus 脉冲收发仪作为信号源,发射负尖脉冲来激励纵波水浸点聚焦探头进行声波的发射和接收。利用软件驱动数据采集卡监控脉冲收发仪的状态并将接收到的声波信号进行数字化。根据声速测量的高精度要求,系统测量时设定超声信号的采样率为2 GHz,借助PCI-E总线将采集卡采集的超声原始信号传输到计算机端。
3.2 系统关键参数及信号分析
在进行声速测量前,需要选定水浸点聚焦探头的频率、探头与试样的水浸耦合方式。由于待测试样的尺寸较小[φ25 mm×50 mm(直径×壁厚)],所以采用全水浸的耦合方式实现探头与待测试样的样的耦合。根据材料特性和试样厚度粗选了两种不同频率的探头(具有相同的焦距F,F=152.4 mm),需要通过试验对比进一步确定使用的探头。试样从康宁7972型玻璃切取制备得到,平面度达0.5λ(λ为氦氖激光的波长),平行度达20 μm,满足高精度声速测量对试样表面状态和平行度的要求。

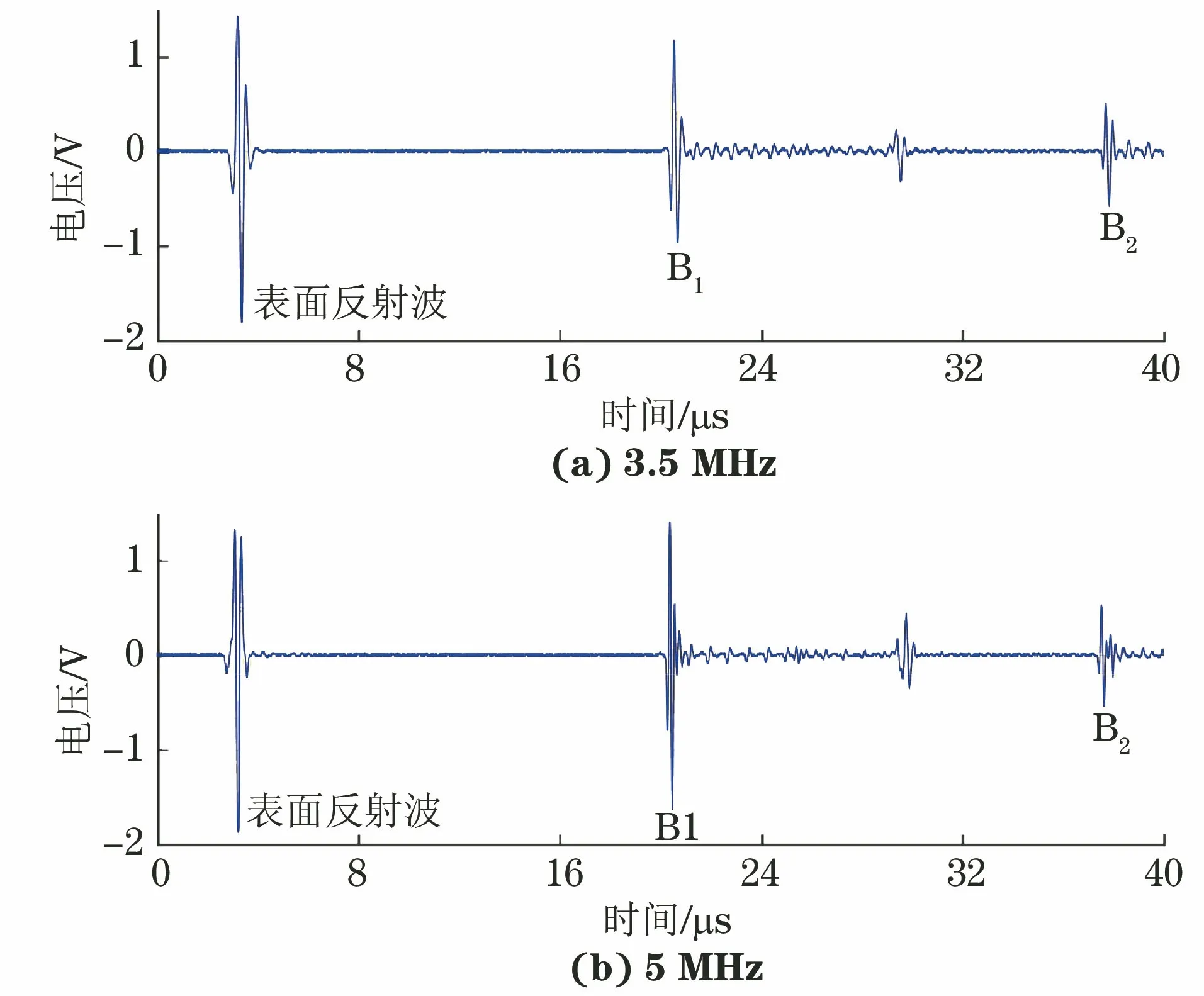
图3 1#试样不同频率探头的回波信号
比较图3(a)和(b)可以看出,不同频率探头测得的回波信号形状存在差异,这主要是因为探头的频率和带宽不同。当探头频率为5 MHz时,波形的分辨率更高,B1的幅值更大,B1与B2的相关性更高,TOF的提取更加准确。
进一步观察发现不同频率探头采集到的回波信号中均存在高频噪声,为了分析噪声对相关法计算TOF结果的影响,笔者基于MATLAB的图形化用户界面开发了信号处理软件模块。声速测量软件界面如图4所示。

图4 声速测量软件界面
选用滑动平均滤波法对5 MHz探头采集到1#试样的回波信号进行滤波降噪,降噪前后的信号波形如图5所示。将5个超低膨胀玻璃试样降噪前后的信号分别按2.2节所述的过程计算TOF,计算结果如图6所示,可以看出回波信号的降噪与否对TOF的大小几乎没有影响,最大差异为0.2 ns,明显低于回波信号的最小采样周期0.4 ns。因此判断噪声信号的相关性非常小,在相关系数的计算中可以忽略其影响[18]。

图5 降噪前后5 MHz探头测得的1#试样的回波信号

图6 5个试样降噪前后的TOF结果
用图4所示的软件读取原始超声测量信号,并从中截取试样的B1和B2信号进行相关系数计算,读取相关系数曲线峰值对应的横坐标得到TOF,显示在渡越时间一栏。在界面上输入试样的厚度,点击计算,即可得到被测试样的声速。
为进一步对比两种频率探头的声速测量结果,利用两个探头重复测量了1#试样的声速,结果如图7所示(图中横坐标1st表示第一次测量,其余类比)。

图7 不同频率探头测得的1#试样的声速
由图7可知,3.5 MHz探头和5 MHz探头测得的声速结果基本一致,且重复测量的标准差都很小,接近于零,在要求的精度范围内,但5 MHz探头测得的B1和B2的相关系数均大于0.99,明显高于3.5 MHz探头的相关系数,且变化幅度较小。这表明5 MHz探头测定的TOF稳定性更高。因此,试验选定5 MHz的水浸点聚焦探头进行后续声速测量研究,探头直径为19 mm,外观如图8所示。

图8 5 MHz探头外观
3.3 声速测量试验
制备了15个φ25 mm×50 mm的超低膨胀玻璃试样,试样的直径比探头的直径略大一些,有利于消除“边界效应”的影响。试验对每个试样的厚度测量5次,取其平均值。
为同时观测温度变化对声速的影响,将15个试样分为两组,第一组为1#8#试样,第二组为9#15#试样。第一组测量时的平均水温控制为21.7 ℃,第二组测量时的平均水温控制为18.4 ℃。设置H=18 mm,增益为15 dB,采用5 MHz水浸点聚焦探头发射和接收超声波,在超声信号采集显示软件上观测多个超声回波。
为满足统计学的随机性原则,用某一区域内不同点声速测量值的平均值来代表该区域的声速,在距试样表面中心6 mm以内的区域,选取5个不同的位置点进行重复测量,由相关法确定5个位置的Δt(i)(i=1,2,3,4,5),再取其平均值作为最终的TOF,最后结合试样厚度计算出声速,结果如表2所示。
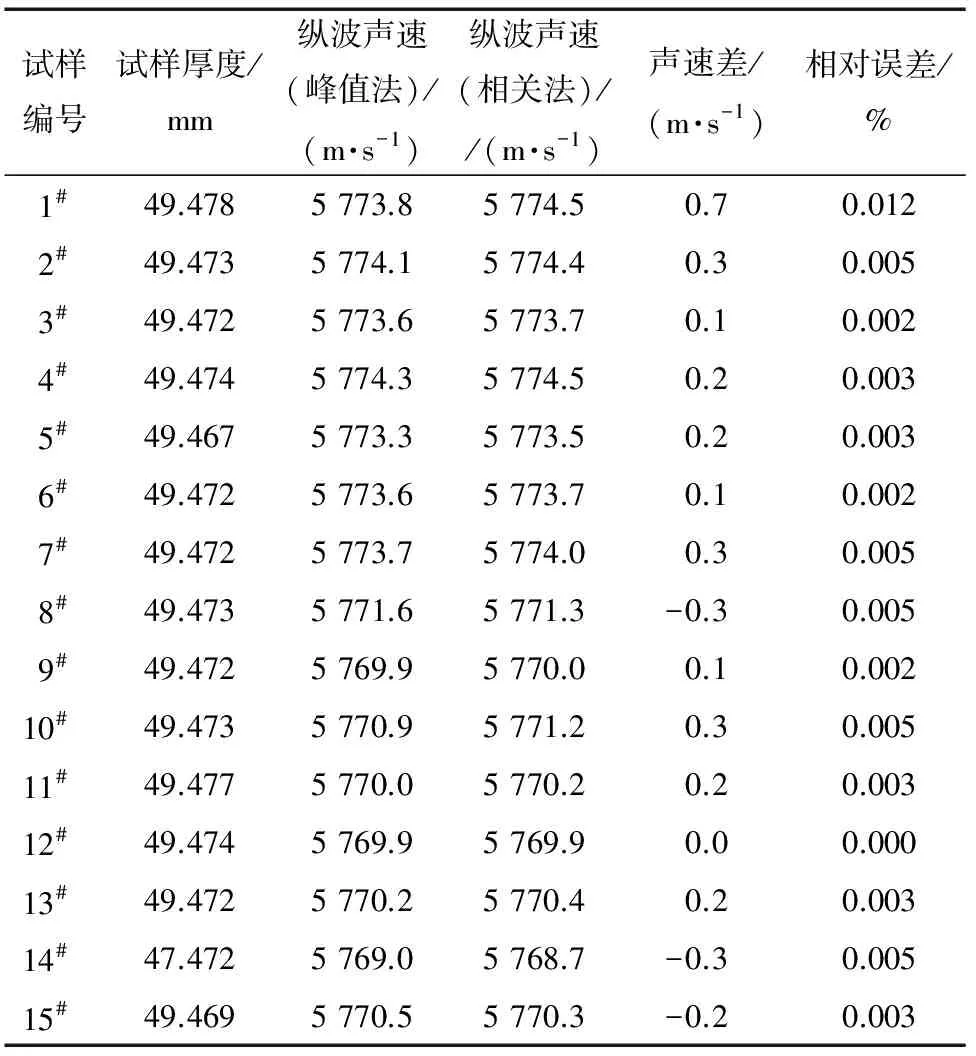
表2 15个试样的声速测量结果
采用目前广泛应用于声时测厚模块的峰值法对不同试样的声速进行了测量,并将其测量结果与相关法进行对比,结果如图9所示。

图9 不同方法的声速测量结果对比
根据超低膨胀玻璃热膨胀系数的精度要求,声速测量的精度必须达到0.4 m·s-1。为了验证文章建立的测量方法及系统是否满足该精度要求,利用第一组试样分析了声速测量的重复性精度。每个试样在相同的位置点进行5次重复测量,结果如图10所示。由数据计算得出每个试样重复测量的标准差依次为0.08,0.05,0.00,0.04,0.00,0.09,0.09,0.05。

图10 相关法的声速测量重复性分析结果
3.4 结果分析与讨论
由图9可以看出,相关法得到的声速与峰值法的几乎一致,但也存在微小差异,这可能是因为两种方法在原理上存在差异:峰值法是利用B1和B2相同位置的峰值或谷值对应的时间差来确定TOF的;相关法则是借助两个回波信号整体的相关性来确定TOF的。
进一步观察分析表2数据可以得到以下结论。
(1) 15个试样的声速最大相对误差未超过0.012%,绝大部分试样的声速相对误差都小于0.005%,说明了文章采用相关法进行声速测量是可行的。
(2) 第一组试样的声速整体高于第二组试样的,这与声速测量时的水温控制相对应。由于材料内部的纵波声速与其杨氏模量有关,杨氏模量的大小受材料温度的影响,所以试样温度的变化也会影响其声速的大小。
(3) 各试样的声速离散性较小,因为所选的超低膨胀玻璃材料本身的内部组分比较均匀,其杨氏模量较接近。声速测量成为表征超低膨胀玻璃组分径向分布均匀性的一种有效手段。
相关法声速测量的标准差小于0.1 m·s-1,表明采用相关法计算声速具有较高的重复性精度。由于相关法TOF的测量结果只受两底波信号相似性的影响,信号波形是否规则不会影响TOF的测量结果,所以相关法抗干扰能力较强,重复性较好。
4 结论
(1) 分析了相关法确定TOF的原理并进行了仿真分析,仿真结果表明,TOF的计算结果与理论设定值吻合较好,说明该方法适用于声速测量中的超声信号处理。
(2) 将相关法测得的声速与峰值法测得的进行对比,二者的最大相对误差不超过0.012%,表明二者具有很好的一致性,验证了基于相关法进行超低膨胀玻璃声速测量的可行性。
(3) 相关法声速测量的标准差小于0.1 m·s-1,具有较高的重复性精度。
猜你喜欢
少先队活动(2022年9期)2022-11-23
东坡赤壁诗词(2020年5期)2020-11-06
城市道桥与防洪(2019年5期)2019-06-26
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
通信电源技术(2016年6期)2016-04-20
通信电源技术(2016年5期)2016-03-22
航空学报(2015年4期)2015-05-07
航空学报(2015年4期)2015-05-07
中国当代医药(2015年8期)2015-03-01
浙江大学学报(工学版)(2015年1期)2015-03-01
