
倾斜摄影测量的城市战场环境三维建模及可视化*
2021-12-29 07:19廖章回韦敏杰
火力与指挥控制 2021年10期
廖章回,朱 伟,韦敏杰
(1.陆军特种作战学院,桂林 541002;2.广州南方测绘科技股份有限公司南宁分公司,南宁 530023)
0 引言
纵观伊拉克、叙利亚等现代化战争,由于城市功能的日益集中,其得失已成为现代战争胜负的重要标志,信息化条件下,战争持续时间较短、交战双方对伤亡都有所顾忌,更加重视对具有象征意义的重要城市的争夺,城市作战具有比以往更强的政治和胜败内涵[1]。随着军事技术的变革、精确打击和特战夺控、斩首、人质解救的运用,传统二维地图的局限性已经无法满足军事训练和军事指挥决策的需求,但目前,战场环境可视化仍多采用二维纸质或数字地图进行相关环境地理位置信息展示[2],城市在高速发展,城市三维场景需要不断更新,它已经无法满足信息化条件下,对三维城市战场立体模型的快速构建,以及海量数据可视化呈现和各项作战行动要素的分析[3]。因此,需要一种全自动或半自动的三维场景建模技术,和一个适用于大数据操作浏览的可视化分析平台来解决当下问题。
近几年测绘领域发展起来的一项新兴、热门技术——无人机倾斜摄影测量,已经在民用三维建模方面得到了广泛和成熟的应用[4-6]。传统的三维场景建模需要实地采集照片,再进行纹理贴图制作,且需要花费大量的人力进行模型场景构建[7],而利用无人机倾斜摄影测量技术结合Context Capture Master 自动化软件构建三维场景模型,实现了城市战场模型的快速、高效、低成本的真实还原,结合LSV(Loca Space Viewer)平台加载实现城市作战要素信息的可视化,对辅助战役指挥员全面、深入、高效地掌握复杂城市战场环境,及时有效地作出正确决策,提升作战效能具有重要意义[8-9]。
1 三维建模关键技术及流程
1.1 无人机倾斜摄影测量技术
倾斜摄影测量技术(oblique photography technique)是随着消费级无人机的发展而兴起的测绘技术,是传统摄影测量技术的升级版。通过搭载在航测无人机上的4 个倾斜镜头和1 个垂直镜头,可同时获取前、后、左、右及正射5 个方向的地物影像数据,通过集成在无人机上的POS(Position Orientation System)系统,即差分GPS(Differential GPS,DGPS)与惯性测量单元IMU 的组合,能够实时记录载体的位置、姿态、速度等导航信息,将POS 观测值作为原始影像粗略的初始外方位元素,结合传感器的成像模型,经过POS 计算机自动导航解算得到多视影像上每个像元的物方坐标,再经过相对定向和精确匹配,结合野外少量的控制点坐标,便可得到倾斜影像的联合空中三角测量成果,其结果方能满足城市战场的坐标使用。图1 为多角度获取影像示意图。

图1 倾斜摄影测量数据获取示意图
1.2 城市战场实景三维模型构建流程
无人机倾斜摄影测量的5 镜头影像获取技术突破了传统正射影像的缺陷,使获取的成果影像更符合人眼视觉的真实感官效果。构建实景三维模型流程如图2 所示:1)收集测区资料,掌握测区实际范围和最高、最低点海拔以便明确飞行高度。2)规划无人机航飞路线,获取无人机相关参数信息。3)测区控制点布设,为保证航测成果的精度,确保成果与实际指挥用图时的坐标系统一致,要在测区内选择控制点并用GPS-RTK 进行测量。4)无人机外业航测获取影像,获取倾斜影像、POS 数据,检查影像质量、重叠度、变形等内容。5)确定影像数据正确后,根据少量测量的控制点,进行空三加密,通过多视影像密集匹配自动寻找连接点,构建TIN 三维网格,根据TIN 网格完成3D 纹理映射,通过分布式处理实现三维重建。6)对模型进行优化后,输出OSGB(Open Scene Graph Binary)格式的三维模型,加载至LSV 中进行城市战场环境各要素的分析。

图2 城市战场实景三维模型构建流程
2 影像获取及模型实现
2.1 测区概况及影像数据获取
以广西南宁市某城职学院航测项目为研究对象,测区范围左上角经纬度分为22.595°N,107.913°E,右下角分别为22.585 3°N,107.925°E,实地长宽1 km×1.2 km,面积1.2 km2,图幅内包含道路、水系、居民地、植被、山体、高楼等军用地图主体绘制的几大要素,符合城市作战基本要素要求。
为得到高精度的地图数据模型,在确定范围后需要在测区内均匀布设一定数量的控制点并测量其坐标,在空三处理中,将地面测量成果与航测影像进行融合,从而提高战场地形的坐标精度。采用GPS-RTK 实时动态差分测量技术,测点速度快,效率高,节省成本,既能够满足城市作战数字地图采集的精度要求,又能够解决地图采集时间紧、任务量大的问题。对测区布设的6 个控制点坐标进行了量测,获得CGCS2000 坐标成果如表1 所示。采用大疆M600 PRO 六翼无人机,航飞高度100 m,航摄影像分辨率0.027 m,设置航向重叠80%,旁向70 %,规划航线纵、横各27 条,共获影像5 100 张约40 G大小,如图3 所示。

表1 控制点测量坐标

图3 控制点位范围及飞行航线
2.2 模型实现
检查影像正确无误后,建模系统采用Bentley公司的Context Capture Center(原Smart3D,CC)全自动系统,无需人工干预从简单连续影像中生成最逼真的实景三维场景模型,其优势在于快速、简单、全自动,并具有广泛的数据源兼容性和优化的数据格式输出,包括obj、osgb 等通用兼容格式,能够方便地导入各种主流GIS 应用平台,流畅应对本地访问或是基于互联网的远程访问浏览。其处理流程如图4 所示,空三计算和成果三维模型场景分别如图5、6 所示。

图4 CC 建模流程

图5 CC 空三计算

图6 实景三维城市模型效果
3 城市战场作战要素可视化及适用性分析
世界的本质是三维或是多维的存在,地图是根据一定的投影法则,将多维空间简化为平面上的二维图形,对于信息时代的战争注定了它对三维空间描述上的无能为力,对城市战场环境更是如此[10-11],城市战场环境复杂,高楼密集,机动装备受阻,视野狭小,射击机动困难,因此,选择灵活、机动的小分队特种作战是城市作战最有利的战斗形式[12],同时,对城市反恐作战、突发事件的维稳与救援也同样适用。
3.1 坐标、距离、面积、高度的量测
从小队作战的用图需求和指挥决策出发,将模型加载在LocaSpace Viewer 平台,能够快速地浏览、测量、分析和标注三维地理信息数据,实现三维场景的飞行浏览和拖拽、平移、翻转等多视角浏览,支持多种在线地图,将构建的实景三维城市模型加载其上,可与各地图完美套合,垂直视角可作正射影像(DOM),可直接结合ARCGIS/CASS/EPS 等绘图软件,快速绘制出二维平面地图,如图7(a)所示,红色框表示模型与地图接边的典型地物,可看出道路、山体能较好地与地图重合,结果验证了航飞的精度。倾斜视角可替代传统沙盘演示和二维地图上的量测,可对目标物体进行立体量测,视角更逼真,精度更精准,误差保持在航摄影像分辨率0.027 m级别,如图7(b)所示,假定图书馆是敌占领点,若要采取特战夺控,可先测得其坐标、楼体长度、高度、面积、楼层等,以供指挥员分析参考。

图7 模型加载与量测分析
3.2 通视判别、可视域、路径导航与雷达分析
以构建的城市三维实景地理信息、小队部署、要图标绘等为基础支撑,实现了信息查询、地形分析、立体要图标绘、通视判别、可视域、路径导航与雷达分析等主要功能的可视化分析。为指挥员处置应急突发事件、正确分析情况、判定态势定下决心,提供有力的支撑。
1)多媒体标注更醒目。如图8(a)所示,对重要位置如安全出口、可疏散点、重要目标点、站立点、狙击阵位等,可在模型上以图文、音视频等多种媒体形式进行标注,能够更加直观地了解城市战场环境实体信息。
2)空间分析更便捷。可迅速完成可视域分析、通视判别等三维分析,提供复杂城市战场环境下的战略战术决策指挥。如图8(a)所示,通过单击通视分析,在地面或者建筑物表面选择一点,然后鼠标移动到另一个位置点击结束,即可判断出两点间是否有障碍物,是否可见,若两点可视,则连线显示绿色,如不可视,则显示红线并同时显示两点空间距离、垂直距离、水平距离以及起点海拔信息。在地面上或空间点(狙击阵位1)点击一点作为地面监测点,鼠标拖动画圆,再次点击开始对地面进行可视分析,分析结果中红色部分是不可见区域,绿色部分是可见区域,如图8(b)所示。
3)路线规划更直观。在实景三维地图上加载obj 格式的单兵模型、车辆模型、无人机、战斗机模型及任务目标,展示空间立体战争态势。设计进攻路线、精准打击路线等,使每个参与者都能直观理解预案。如图8(c)所示,假定图书馆为敌占指挥中心,红色路线为特战小队进攻路线,该路线显示了每一段距离的实际长度和方位角,结合手持定位系统能使队员清晰掌握目标方位和路线距离、坐标等信息。同时通过三角测量能直接量测我方坦克装甲群、察打一体无人机群到目标点的水平、垂直、倾斜距离以及方位角、坡度等信息,依据高精度的数字三维地图完成精确有效的打击。
4)战场环境高保真。以实景三维为基础,实现自然环境及雷达分析等战场仿真效果,展示高保真战场环境,如图8(d)所示。同时还可以做剖面分析、填挖方分析、淹没分析、缓冲区分析等三维空间分析。
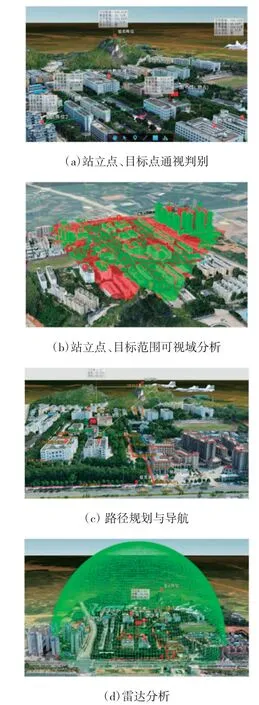
图8 作战指挥分析
3.3 可视化平台适用性分析
三维数字地球LocaSpace Viewer(LSV)属国内苏州中科图新旗下产品,其包含了SDK 对外开放开发包、Android 和AndroidPad 移动端平台以及LSV网页版平台,用户可申请开发包自主开发功能,也可以根据不同需求免费下载移动端平台,通过云端与LSV 客户端进行数据的交互,十分方便。同时LocaSpaceViwer 也提供了配套的功能定制服务,OEM 定制服务和网络发布服务,可以实现大量实际应用方案的定制以及海量数据的互联网发布服务,根据需求特点,可为我指战员定制独具特点的指挥平台,将需要构建的城市战场环境三维建模(osgb格式),以及作战要素直接加载至电脑端和平板电脑端LSV,可为实战过程中的便携性、实时性提供良好保障,既起到实案推演、实战应用、实效检验的作战训练目的,又能实现深度的军民技术融合。
4 结论
本文基于无人机倾斜摄影测量技术,以某地实际航测城市模型为案例分析,实现了城市战场环境的三维建模,以最佳方式呈现了战场环境可视化等分析,在实际示例中进行了目标物体的坐标、距离、面积、高度的量测,得到了较高精度的结果,模拟了战场态势并对通视判别、可视域、路径导航与雷达等进行了分析,以逼真的城市战场环境三维场景,代替传统的抽象地图符号,直接将城市以生动的三维模形环境展现在指战员面前,为指战员认识城市战场环境提供一个栩栩如生的可视化平台,以便在出兵前能够掌握任意地点的地形、地貌、路况、通车状况、周围村镇状况及最佳监测点位置,真正做到运筹帷幄,决胜千里。
猜你喜欢
北京测绘(2022年6期)2022-08-01
小哥白尼(军事科学)(2022年1期)2022-04-26
师道·教研(2022年1期)2022-03-12
现代企业(2021年2期)2021-07-20
华人时刊(2021年23期)2021-03-08
意林(2020年20期)2020-11-06
冰雪运动(2019年3期)2019-08-23
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
汽车之友(2016年15期)2016-08-23
