自动垂直泊车控制算法研究
2022-01-13 03:34张春洲
机械设计与制造 2021年12期
石 晶,张春洲
(辽宁工业大学研究生学院,辽宁 锦州 121001)
1 引言
在当今高级辅助驾驶系统的多元化发展趋势下,对高级辅助驾驶的研究已经不仅限于各大汽车制造企业及汽车设计公司,各高校已经逐渐开始对高级辅助驾驶进行更为深入的研究并进行相关模拟或实车实验。自动泊车系统(APS)作为高级辅助系统下的一个重要分支,起着至关重要的作用。在驾驶员日常泊车时,由于泊车过程中驾驶员较大概率会产生紧张感,增大泊车难度,容易造成车辆碰撞,因此自动泊车系统可以给驾驶员提供很大便利。
自动泊车是通过探测车辆周围环境信息来找到合适的泊车位,从而控制车辆的转向和速度,使得车辆能够自主驶入泊车位[1]。车辆在垂直泊车过程中,初始位置车身方向角在正负15°之间,且随着离泊车位越近,车身方向角越大,在泊车完成时,车身方向角约为90°;泊车时方向盘打向泊车位方向,方向盘转角先增大后减小,直至完成泊车。通过模糊逻辑控制器控制汽车运动模型中输出的方向盘转角,进而通过方向盘转角改变车身方向角,实现车辆从初始位置到泊入车位的全过程,最后的仿真结果显示上述论点可以得到验证。
2 汽车运动模型搭建
根据大部分车辆长宽比例规定汽车长2500mm,宽1500mm,车速为5km/h。在汽车泊车过程中,汽车速度通常为(3~5)km/h左右,车辆产生很小的离心力,从而可以忽略轮胎侧向力,故只考虑纵向作用力,不考虑横向作用力,因此车辆满足阿克曼转向原理(Ackermann steering geometry)。阿克曼转向原理指的是:汽车直线行驶时,4个车轮的轴线都互相平行,而且垂直于汽车纵向中心面;汽车设计时,为了避免汽车转向时产生的路面对汽车行驶的附加阻力和轮胎的过快磨损,车辆在转向时,要使所有车轮均为纯滚动而无滑动[2]。研究车辆行驶过程中的运动轨迹,建立车辆泊车过程的动力学模型[3-4],垂直泊车运动模型,如图1 所示。图1 中汽车自动垂直泊车运动模型参数:式中后轴中心点(Xa,Ya);车身方向角θ,即车身纵向对称平面与x轴间的夹角[5];前轮转角α;前后轴距离L,车辆宽度w。
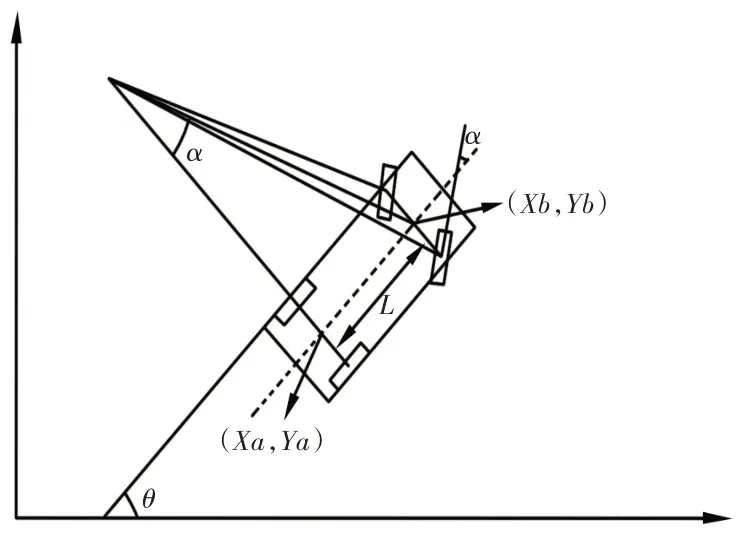
图1 垂直泊车运动模型Fig.1 Vertical Parking Motion Model
汽车在低速泊车过程中,车辆沿后轴轴线速度为0[6],可得:

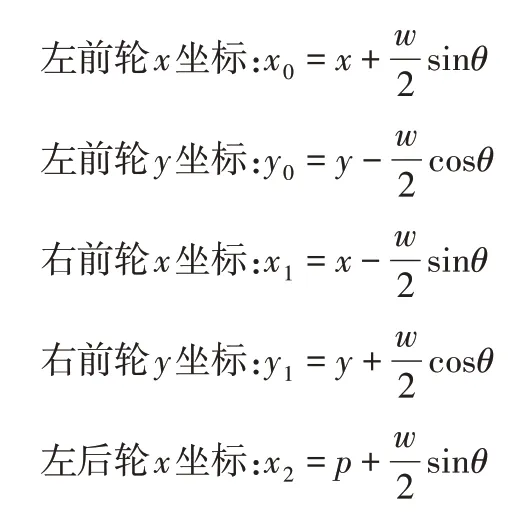
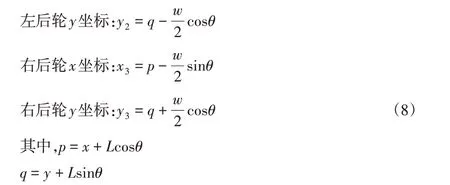
为了实现汽车运动轨迹仿真,需知道汽车四个轮的坐标,经计算车辆车身四个顶点的坐标为[7]:
由上述算法可知汽车在泊车过程中的横向速度、纵向速度和车身方向角的一阶导数,通过对三个变量积分,可以得到汽车泊车过程中的横向位移、纵向位移、车身方向角、前轮转角四者的相互关系。在Simulink 中对此算法进行模型搭建,泊车运动模型,如图2所示。
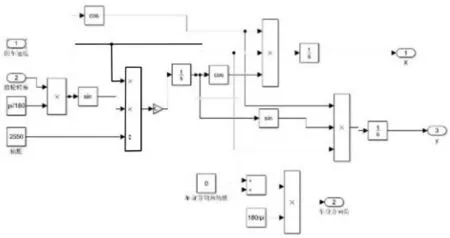
图2 泊车运动模型Fig.2 Parking Motion Model
3 路径规划
根据驾驶员经验可知垂直泊车流程如下:
(1)驾驶员将汽车泊到与泊车位前方的垂直位置,与边线距离(0.5~1)m,若车身与泊车位不平行,则首先将车身摆正。
(2)驾驶员将方向盘向右打死,继续泊车直至汽车与泊车位相平行;
(3)持续泊车直至汽车完全泊入泊车位。
按照以上流程可以确定的垂直泊车的运动轨迹和汽车在泊车过程中的路径算法,如图3 所示。确定泊车过程中车轮四个轮胎中心坐标及车身方向角位置变化关系,t为采样间隔时间:
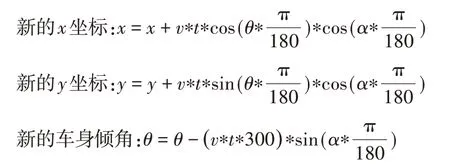
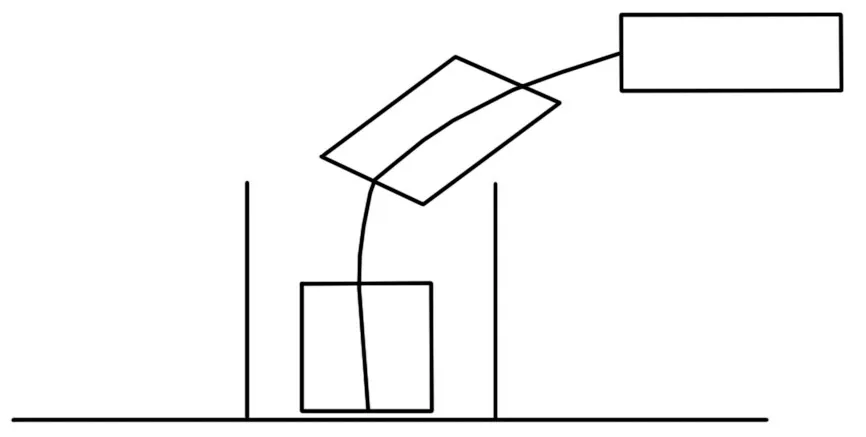
图3 垂直泊车运动轨迹Fig.3 Vertical Parking Trajectory
4 模糊控制
利用MALAB 中的fuzzy 工具箱,通过修改输入、输出参数,完成自动泊车。综合控制精度和响应速度两方面考虑,在保证控制精度的前提下[8-9],选取横向位移x、车身方向角θ为模糊控制器的输入,前轮转角α为模糊控制器的输出量。通过模糊控制实时控制泊车过程路径规划算法中的四个轮胎中心坐标及车身方向角,其中横向位移、纵向位移、车身方向角、前轮转角的相互关系已在汽车运动模型搭建中推导出,保证了汽车泊车过程中的平稳性、顺滑性。
4.1 输入量横向位移参数
根据3中所建立的泊车位笛卡尔坐标系可知,水平范围为(-20,120),即确定输入x轴方向论域为(-20,120),模糊子集划分为1个,{N}。N表示车辆位置横坐标,隶属度函数为梯形:[-56.9-36.6 39.21 40.7]。隶属度函数,如图4所示。
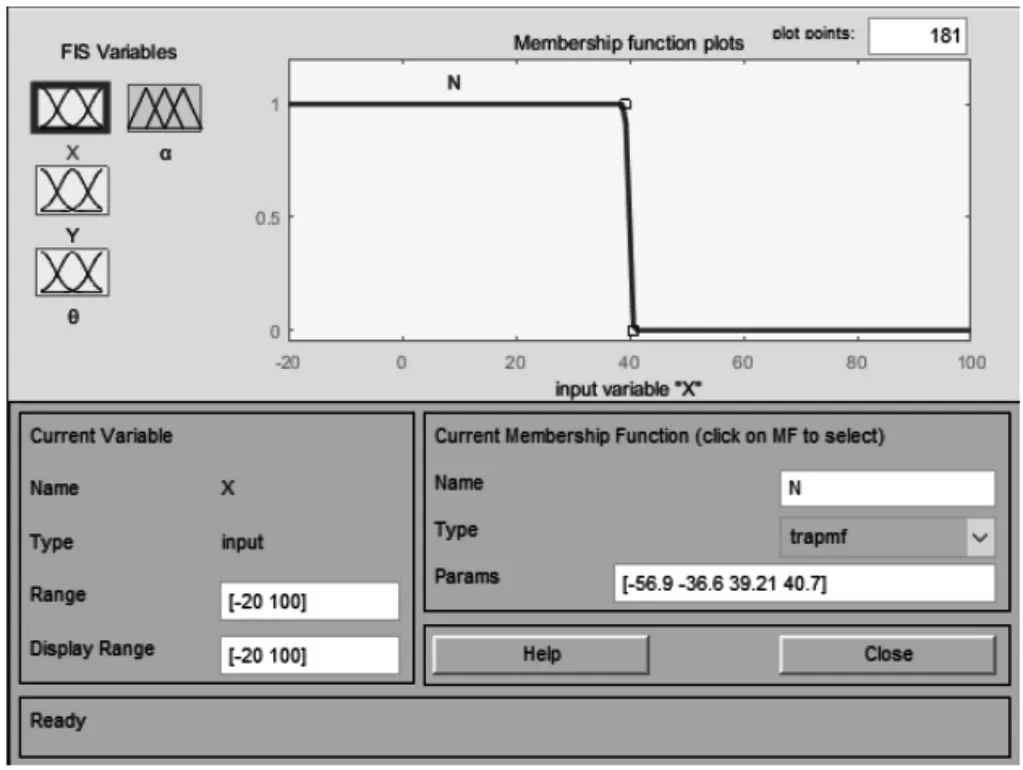
图4 横向位移隶属度函数Fig.4 Lateral Displacement Membership Function
4.2 输入量车身方向角参数
驾驶员在操纵车辆时会使车辆在道路中心线左右行驶,车身方向角与中心线偏移在正负15°以内,因此定义车身方向角论域为(-90,92),模糊子集划分为4个,{N,PS,PM,PB}。N表示车身方向角小,隶属度函数为梯形:[-105-97.46-8.83-1];PS表示车身方向角适中,隶属度函数为梯形:[-1.2-1 1 1.2];PM表示车身方向角较大,隶属度函数为梯形:[1 6.53 79.7 93.4]。PB表示车身方向角大,隶属度函数为梯形:[88 89 90 91]隶属度函数,如图5所示。

图5 车身方向角隶属度函数Fig.5 Body Orientation Angle Membership Function
4.3 输出量方向盘转角参数
定义方向盘转角论域为(-45,45),模糊子集划分为4 个,{NB,NS,Z,PB}。NB 表示负大,隶属度函数为三角形:[-84.54-43.94-37.04];NS表示负小,隶属度函数为三角形:[-22.5-19.7-16.55];Z表示零,隶属度函数为三角形:[-0.833 0.2289 2.024];PB表示正大,隶属度函数为三角形:[39.5 44.17 45.4]。隶属度函数,如图6所示。
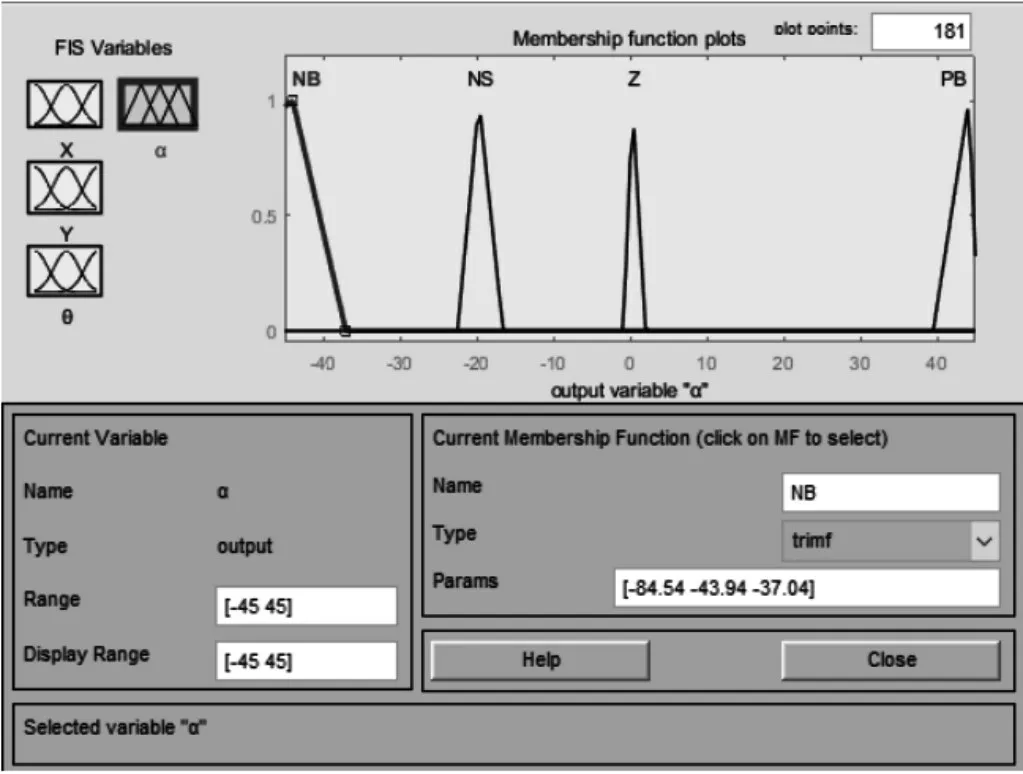
图6 方向盘转角隶属度函数Fig.6 Steering Wheel Angle Membership Function
4.4 模糊规则
模糊规则是表示输入量与输出量之间的模糊关系,在设计模糊控制器时,对于驾驶经验的模糊规则很多,使模糊控制算法实现很困难[10],而且模糊规则数目的增加也加大了规则出错的可能性[11],对此提出建立精简的模糊规则,制定的模糊规则,如图7所示。
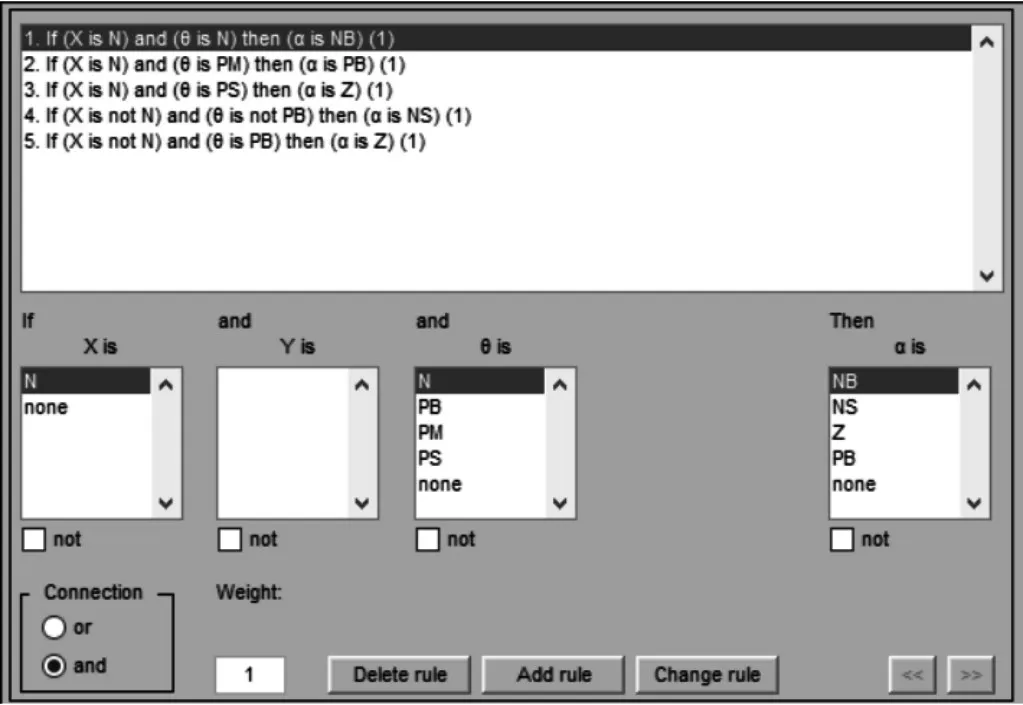
图7 模糊规则Fig.7 Fuzzy Rules
因为在多数情况下,驾驶员在操纵车辆时会使车辆在道路中心线左右行驶,车身与中心线夹角在正负15°以内,因此车辆开始泊车时的纵坐标与泊车位纵坐标间距>3000mm,泊车则顺利完成。在仿真时将车辆初始位置固定,可以忽略纵坐标位置过近造成的不良影响,从而简化模糊逻辑控制器。
5 仿真结果
车型选择小轿车,车位长度为7m,车位宽度为2.5m,车辆宽度为1.8m,车辆长度为4.5m,对车辆的垂直泊车过程进行仿真。车辆初始位置纵坐标固定,初始车身方向角可在±15°内任意设置,以0°和5°为例,泊车速度为5km/h。根据搭建的汽车运动学模型及路径规划算法,在Matlab中搭建汽车、停车位等仿真环境,同时引入模糊逻辑控制器,模拟汽车的垂直泊车过程。
从图8和图10所示的车辆泊车轨迹可以看到汽车初始车身方向角在一定范围内时,从初始位置到完成泊车过程平稳,通过轨迹可以看出车辆在垂直泊车过程中轨迹均匀,没有特别明显的波动迹象。通过对车身方向角初值的改变,经过对图9 和图11的分析可以发现,当车身方向角初值为0°时,汽车直接进行泊车,当车身方向角初值为5°时,汽车在泊车初始阶段先调整车身方向角与泊车位呈垂直关系,进而继续泊车,以保证汽车能够完全泊入车位。

图8 θ=0°仿真图像Fig.8 θ=0° Simulation Image
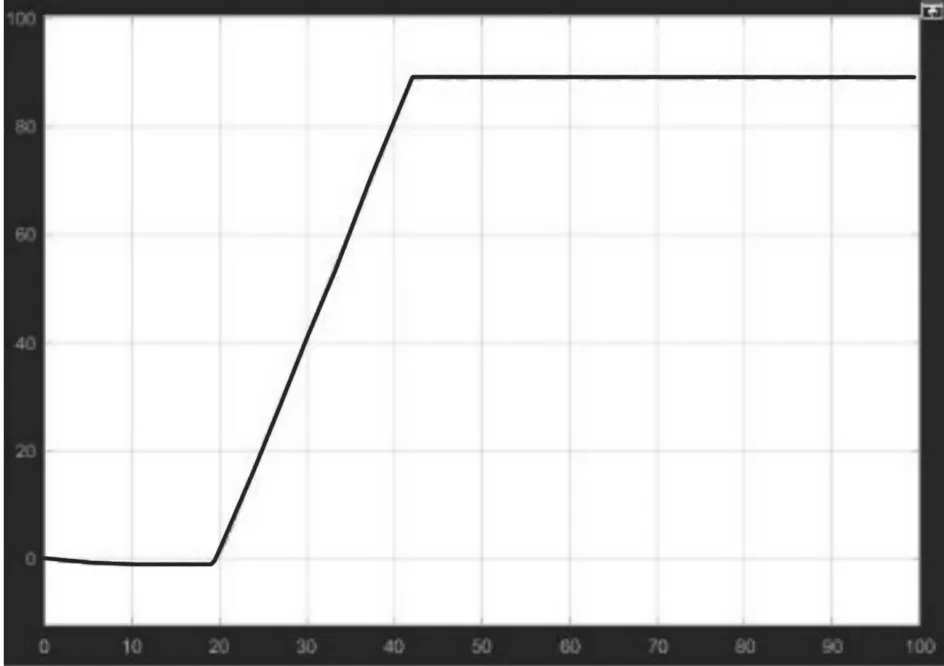
图9 θ=0°车身方向角变化Fig.9 θ=0° Change of Body Direction Angle
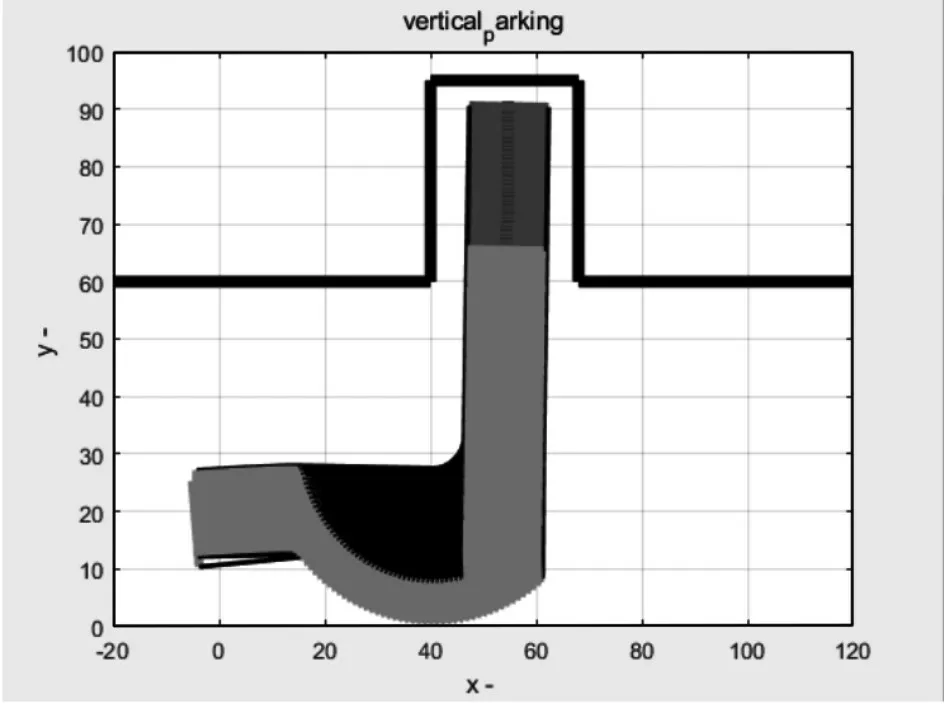
图10 θ=5°仿真图像Fig.10 θ=5° Simulation Image

图11 θ=5°车身方向角变化Fig.11 θ=5° Change of Body Direction Angle
6 结论
通过提出的一种基于模糊控制的垂直泊车三段式路径规划方法,从理论上验证了方案的可行性,在Matlab中搭建仿真模型,设计较符合实际的模糊逻辑控制器,得到预期的仿真结果。仿真结果表明:汽车初始车身方向角在一定范围内,初始纵坐标与泊车位距离>3m,均可实现平稳、顺滑的良好泊车,可以应用到不同泊车位、不同车型的垂直泊车中,为接下来在ADAS实验平台的仿真提供了可靠的基础算法,为设计“自动垂直泊车”控制器提供参考依据。
猜你喜欢
世界汽车(2022年11期)2023-01-17
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
军民两用技术与产品(2020年3期)2020-04-07
解放军健康(2017年5期)2017-08-01
知识经济·中国直销(2016年2期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
汽车维修与保养(2015年7期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28