
EGM2008和星基差分系统在外海水深测量中的应用
2022-01-15 02:53廖正康
中国新技术新产品 2021年21期
廖正康
(福建省海陆勘测有限公司,福建 福州 350000)
0 引言
在外海海洋测绘中,测量区往往离陆地较远且附近缺乏岛礁,会出现无法接受岸上基站信息或手机等网络信息无法送达的情况,外海高程传输通常采用双潮位仪结合同步期平均海平面法来实现外海高程传递的功能。然而,在投放外海潮位仪时,很难避免潮位仪因受海况的影响而出现移动的现象,且过往船只或渔网也会对其造成破坏甚至使其丢失,导致无法得到正常高基准。利用EGM2008重力场模型和RTX全球精密星基差分方法为外海测量高程传递提供新的解决方法。RTX全球精密星基差可以得到准确的三维坐标,高程为大地高,这与工程需要的1985国家高程系统有差距,需要结合EGM2008重力模型将大地高转换为正常高,以探讨EGM2008和星基差分系统在外海水深测量中的应用。
1 EGM2008重力模型
EGM2008地球重力场模型是由美国国家地理空间情报局在充分利用最新数据的基础上研究并在2008年4月推出的新型地球重力场模型(阶次分别为2190、2159)。EGM2008地球重力场模型采用的基本格网分辨率为5′×5′。中国测绘科学研究院研究员章传银等人[1]曾使用我国各地共7788个GNSS高程点数据对EGM2008地球重力场模型展开了深入研究。结果表明,各地使用EGM2008地球重力场模型计算的高程异常值与中国GNSS水准高程异常值有一定差异,大约为20 cm,其中华东、华中地区为12 cm,华北地区为9cm,西部地区则为24 cm。
利用EGM2008重力场模型计算表面上任意点的高程异常,如公式(1)所示。

式中:φ、λ和ρ分别为P点的地心纬度、地心经度和地心向径;α为参考椭球的长半轴;GM为地心引力常数与地球质量的乘积;rp为P点的正常重力值;Pnm(sinφ)为完全规格化 Legndra函数;Cnm、Snm为完全规格化位系数;n、N为重力场模型展开的最高阶数[2]。
由于1985国家高程基准采用的似大地水准面与EGM2008重力模型不同,将大地水准面相互之间存在的差别记作Δξ,如公式(2)所示。

式中:n为水准点个数; ξ为1985国家高程异常值; ξM为EGM2008重力模型高程异常值。
EGM2008地球重力场模型是目前现有的清晰度最大、精确度最佳且阶次变化最多的世界重力场建模,无论是精度还是分辨率都比EGM84、EGM96等模型高。
2 Trimble RTX 全球精密星基差分系统精度
RTX(Real-Time eXtended)实时差分系统技术是Trimble研发的一种定位技术,是把多种自主创新科技融合在一起,使用户可以在不经过各种地面基础站电台或网络参考站点链接的情况下,实现在地球表面任意区域厘米级定位的功能。这种新定位技术以L波段卫星链路或互联网在全球范围生成和交付精确的卫星改正数据(轨道、时钟和系统偏差)为基础。总体系统基本架构如图1所示。
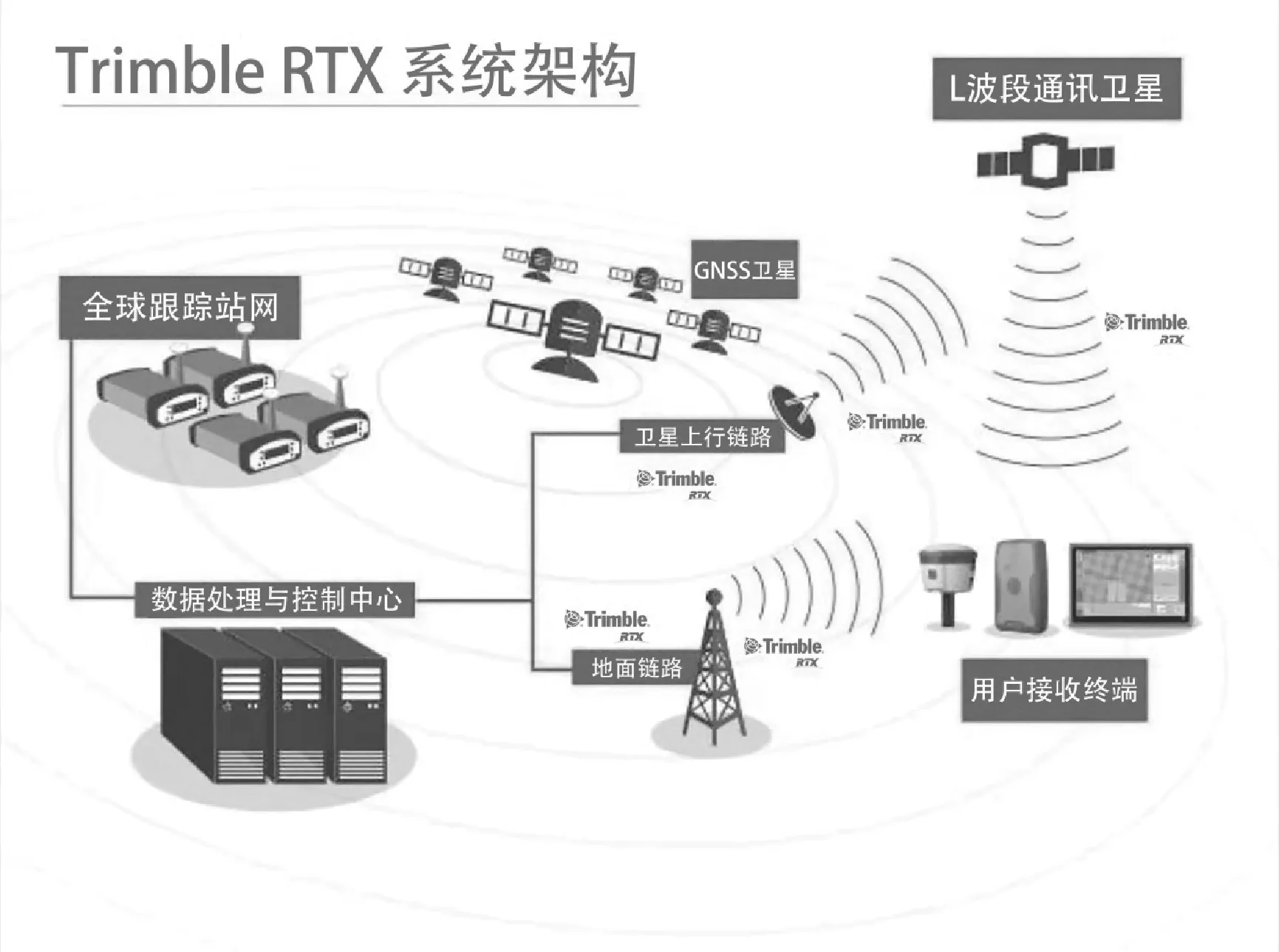
图1 总体系统基本架构图
Trimble RTX全球精确定位服务是利用Trimble在世界建立的120多个地面跟踪站的 GNSS 观测数据算出精确的卫星轨道和卫星钟差,然后利用卫星和互联网的方式将差分改正数据传递给单台GNSS接收机,对其采集的相位和伪距观测值进行差分位置解算,其定位精度见表1。

表1 定位精度
RTX差分改正支持美国的GPS、俄罗斯的GLONASS、日本的QZSS及中国的北斗系统,现在RTX差分服务已经广泛地在各个行业中使用,且RTX星站差分服务系统已经推出了各种即时差分改正业务。
该项目使用Trimble Marine BX992 GNSS定位定向接收机,是天宝最新一代双天线GNSS接收机,能够提供精确的定位和定向。采用Trimble最新一代的Maxwell 7 芯片,卫星达到 672 通道。可以接收GPS、GLONASS、Galileo、QZSS、SBAS、北斗等系统的单点定位(也称为"绝对定位")。并根据一台采用10米基线的接收机观测数据来确定接收机位置,主要用于导航定位,其遥感卫星的分辨率可以达到亚米级的精度,定向精度为0.05°,订购RTX 全球精密星基差分信号服务,定位精度为水平2 cm、高程5 cm。
3 同步时平均海平面
平均海平面(meansealevel)的主要计算方法是逐时法和平均法。平均海平面有日平均海平面、月平均海平面,年平均海平面和多年平均海平面等。由于潮水因月亮而引起,根据农历闰月推算,其3年为一闰,5年为二闰,19年为七闰,因此通常将19年设为一个周期。在该工程项目中,一些验潮站常用18.6年或19年里每小时的观测值求出平均值,并将其作为该站的平均海平面,以确保平均海平面的计算精确度。
在外海水深测量中,采用同步期平均海面法传递高程是一种已被长期采用且简单、精度高的方法,计算同步期平均海面常用的计算方法有24 h或25 h平均法、杜德森方法、鲁斯特方法、陈宗镛方法[3]。世界各地的平均海平面存在一定差别,不过差距很小,有调查资料指出100 km~200 km海区范围内的平均海平面高程变化仅有几厘米[4]。
同步期平均海平面法外业采用瑞士Keller DCX-25自容式潮位仪,它是根据中国海域海水的特点而研发的自容式潮位仪。它采用了高精度哈氏合金材质的压力传感器,在保证精度的前提下抗腐蚀性更强。同时,外壳采用工程塑料材质,克服了容易腐蚀生锈的缺点,更好地保障了内部电路及存储器的安全性。Keller DCX-25自容式潮位仪采用独立的温度传感器,保证了压力的温度补偿效果。
Keller DCX-25自容式潮位仪自动记录潮位数据,再结合人工潮位观测资料将潮位数值归算到85高程基准,有研究表明利用一天的观测资料算出的平均海平面相对波动较大,连续观测3 d的同步数值能够保持一定精度的传递。在考虑较远的海域时,为保证传递高程的准确性,需要有连续7 d的同步观测数值。这样高程传递精度也可满足四等水准的要求。
同步时平均海平面应用在潮汐性质相似的海海区,根据潮汐周期又可分为半日潮型、全日潮型以及混合潮型。
半日潮型的特点是一个昼夜内发生两次高潮和两次低潮,每次的高潮和低潮的潮差基本相同,而涨潮到落潮时间及落潮到涨潮的时间也大体相等(大致为372 min)。中国沿海海域多数地区为半日潮型。福建沿海区域是典型的半日潮,可以使用同步期平均海平面传递高程法。
4 工程实例
该水深测量测区水深约为30 m~40 m,由于面积较大且测区远离大陆,距福建沿海约40 km,测区内无岛礁,无通信信号,因此无法布设测量控制点,该外海测量范围大、时间紧,测量采用的多波束测深系统是目前世界上最先进的进行水下地形测量的设备,多波速具有测量范围大、速度快、精度和效率高、记录数字化以及能够实时自动绘图的优点,可以将传统的测深技术从单波束的点、线扩展到面,并发展到立体测深和自动成图。它主要由主系统和辅助系统组成。其主系统主要包括发射接收阵、收发单元、海底检测单元和操作控制单元四个部分,辅助系统主要包括定位系统、声速剖面测量系统、电罗经和船姿传感器,多波束测深系统通过声波发射与接收换能器阵进行声波广角度定向发射、接收,在与航向垂直的垂面内形成条幅式高密度水深数据,能精确、快速地测出沿航线一定宽度条带内水下目标的大小、形状和高低变化,从而精确、可靠地描绘出海底地形地貌的精细特征。该定位系统采用Trimble Marine BX992 GNSS星站差分技术,可以准确获取200O国家大地坐标系以及大地高,2000国家大地坐标系是我国当前最新的国家大地坐标系(英文名称为China Geodetic Coordinate System 2000,英文缩写CGCS2000),于2008年4月获得国务院批准,自2008年7月1日起,中国将全面启用2000国家大地坐标系,国家测绘局授权组织实施。
按照设计工作需求,该测量成果平面坐标系为2000国家大地坐标系、1985国家高程基准。一种可以得到相应的高程基准的方法是采用双潮位结合同步期平均海平面得到项目所需的正常高,另一种方法是采用Trimble Marine BX992 GNSS星站差分系统和EGM2008重力模型来计算各区域的高程异常值,从而将大地高转换成正常高。
4.1 验潮模式
分别在大陆岸边及外海测量范围内布设自动KELLERDCX25型压力式潮位仪,将验潮仪记录时间间隔设置为10min。在陆地岸边站架设水尺验潮,通过四等水准将高程传递至水尺顶。在短期内定时人工观测水尺,同时记录岸边站潮位仪的数值,并计算岸边站验潮仪的零点高程;在测区内布设压力式验潮仪作为临时推算站,岸边短期潮位站采用同步期平均海面法传递高程,获得临时推算站验潮仪的零点高程,其中同步期平均海平面的计算方法是逐时潮位求平均法。岸边与测区同步水位观测数据如图2所示,由图2可以发现,测区验潮站与岸边验潮站的海域潮汐性质相同,为规则半日潮,从数值记录角度看,数值连续且具有较好的稳定性,又因为两处相距较远,所以两处的最大潮差超过了20cm,平均潮时差不足10 min且水位曲线重合率较好。
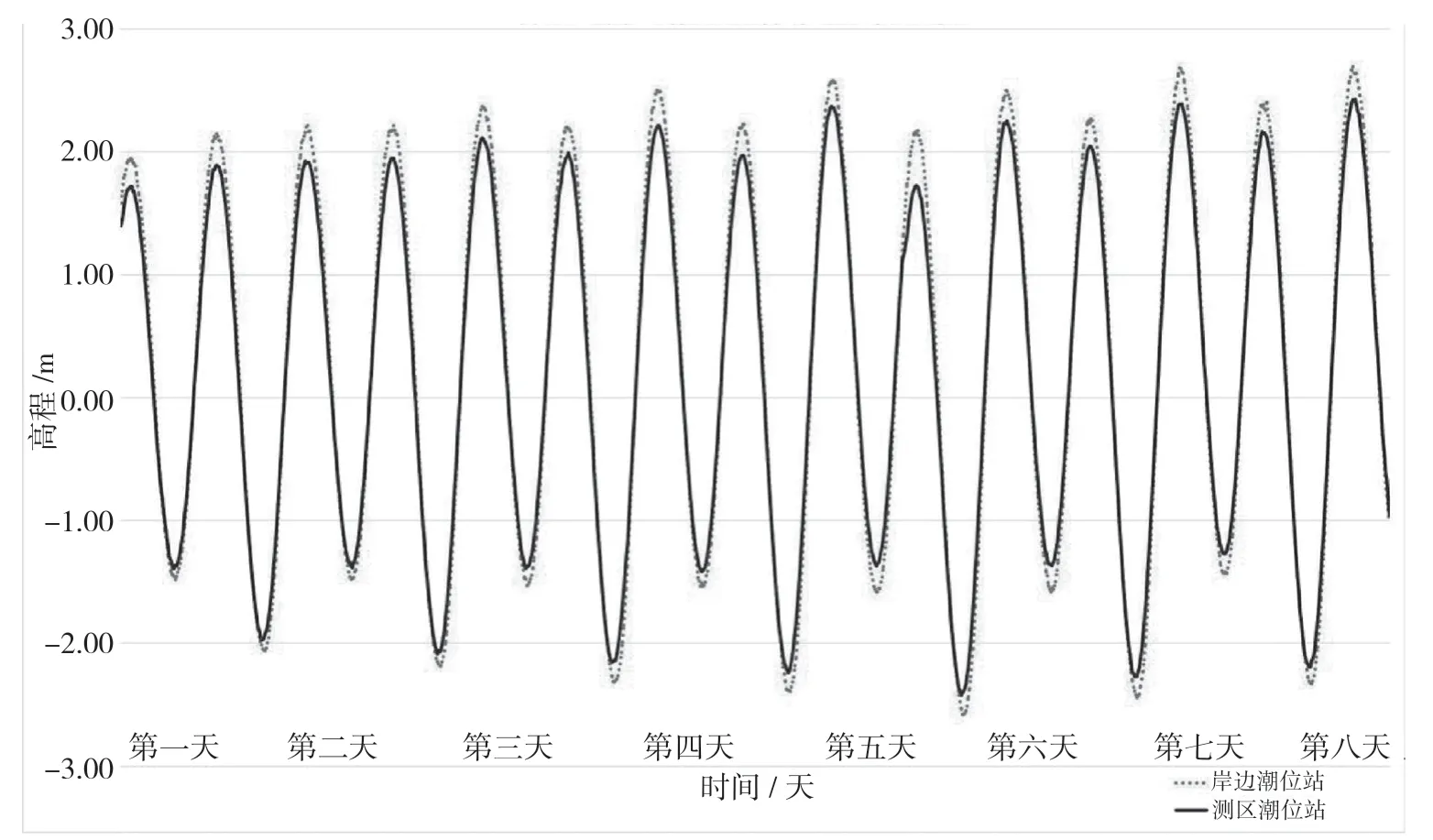
图2 岸边与测区同步水位观测示意图
根据验潮仪8天的同步水位观测数据,人工验潮结合自动潮位仪计算出岸边验潮站平均海平面在85国家高程基准面上25cm,以平均海平面在同步期相等的原则,将验潮数值导入多波速处理软件中输出水下正常高值。
4.2 EGM2008地球重力场模型计算正常高
RTX全球精密星基差分得到的三维坐标与工程需要的1985国家高程系统有差距。该文在实际工程项目中分别采用了RTX全球精密星基差分系统和EGM2008重力模型进行高程转换。笔者收集了测区沿海周边水准控制点,通过计算比较和综合分析,最终选择似大地水准面之间存在差异为Δξ=0.20m。经过基准面差异改正后的最终85高程如公式(3)所示。

式中:H85为1985国家高程值;H84为大地高;ξEGM为EGM2008重力模型高程异常值。
利用EGM2008地球重力场模型和星基差分系统得到水面正常高系统,将数值与多波速水深值结合,得到水下正常高值。采用Trimble Marine BX992 GNSS星站差分和EGM2008重力模型来计算各区域水下的85高程值,并将其与同步期平均海平面的验潮模式计算的高程值进行比较。选取测区平均分布的区域进行比较,较差与精度见表2。

表2 EGM2008重力模型与验潮模式下高程较差(单位:m)
从表2中可以看出,测区不同区域采用两种方法计算得到的高程的最大值为12 cm,精度较好,验证EGM2008地球重力场模型和星基差分系统可以在外海大比例尺水深测量中应用。
5 结语
通过采用双潮位仪结合平均海平面法实现高程传递的方法已经成熟应用于外海测量中,该方案在海洋工程中的应用较简单,可以很好地解决外海高程传递的问题。根据国际标准要求和有关研究可以得出,平均海平面的传递精度随着同步验潮时长的增大会明显提高,15 d~30 d的同步验潮数据得到的平均海面最大误差范围大约为1 cm~2 cm。但采用该方法仍有一些局限,该方法适合潮汐性质一致的外海,并且在放置外海潮位仪时,要要保证其牢固且不被损坏。同时,潮位仪数据要覆盖整个测量时段。
采用Trimble Marine BX992 GNSS星站差分和EGM2008重力模型来进行高程传递,通过分析比较结果可知,经过基准面差异改正后得到的精度也可以满足外海水深工程测量的要求,该方法可作为外海测量求取正常高的新方法。
猜你喜欢
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07
河北地质(2021年1期)2021-07-21
江苏安全生产(2020年8期)2020-10-27
水利水电快报(2019年2期)2019-03-08
中国惯性技术学报(2019年6期)2019-03-04
水利规划与设计(2017年6期)2017-07-18
学苑创造·A版(2017年5期)2017-05-09
测绘科学与工程(2017年1期)2017-05-04
世界科学(2013年11期)2013-03-11
测绘科学与工程(2013年5期)2013-03-11
