基于多传感融合技术的自主巡逻智能预警机器人系统的研究与设计
2022-01-26 12:19裴庆庆
兰州文理学院学报(自然科学版) 2022年1期
裴庆庆
(郑州工业应用技术学院 信息工程学院,河南 新郑 451100)
随着电子商务和快递物流的发展,物流仓储空间快速增大,而智能仓储监测技术未能及时普及,造成仓储事故频发.物流仓储环境中的光照射强度、空气温度与湿度、空气气压和泄漏物的浓度等因素是仓储安全监测与安全预防的重要环境指标.物流仓储的管理模式分为人工监控巡逻管理和工业设备监控管理模式,人工管理模式监控效率不高、对物流仓储空间信息监测不够敏感,工业设备监控存在传感监测采集数据单一、监测盲区偏多、警报漏报误报率偏高、智能程度低和成本较大等缺点[1].
为了解决上述问题,设计了一套24小时自动巡逻、仓储信息采集与检测、智能警报和实时远程监控的智能物流仓储巡逻机器人系统.该系统实现了机器人自主路径巡逻导航、仓储物流环境监测和仓储空间实时远程监控等功能,大大提高了物流仓储的智能化管理水平、危险检测处理和实时预警能力[2].
1 总体方案设计
仓储物流智能预警机器人系统总体设计主要包括3个模块[3]:①环境监测模块主要通过传感器实现仓储环境各类数据的采集,并通过无线网络将采集数据进行融合处理与系统上传;②机器人自主巡逻导航模块主要包括电机驱动、加速度传感器和红外测距传感器,为预警机器人提供了动力导航;③远程监控模块中仓储管理人员可以通过手机或者PC端登录数据存储服务器,实时查看仓储监测情况,以及提供预警机器人的远程遥控等功能.当仓储物流环境存在安全隐患时,该系统实时提供预警信号以及GSM远程通话功能.
仓储物流智能预警机器人系统的总体结构如图1所示.
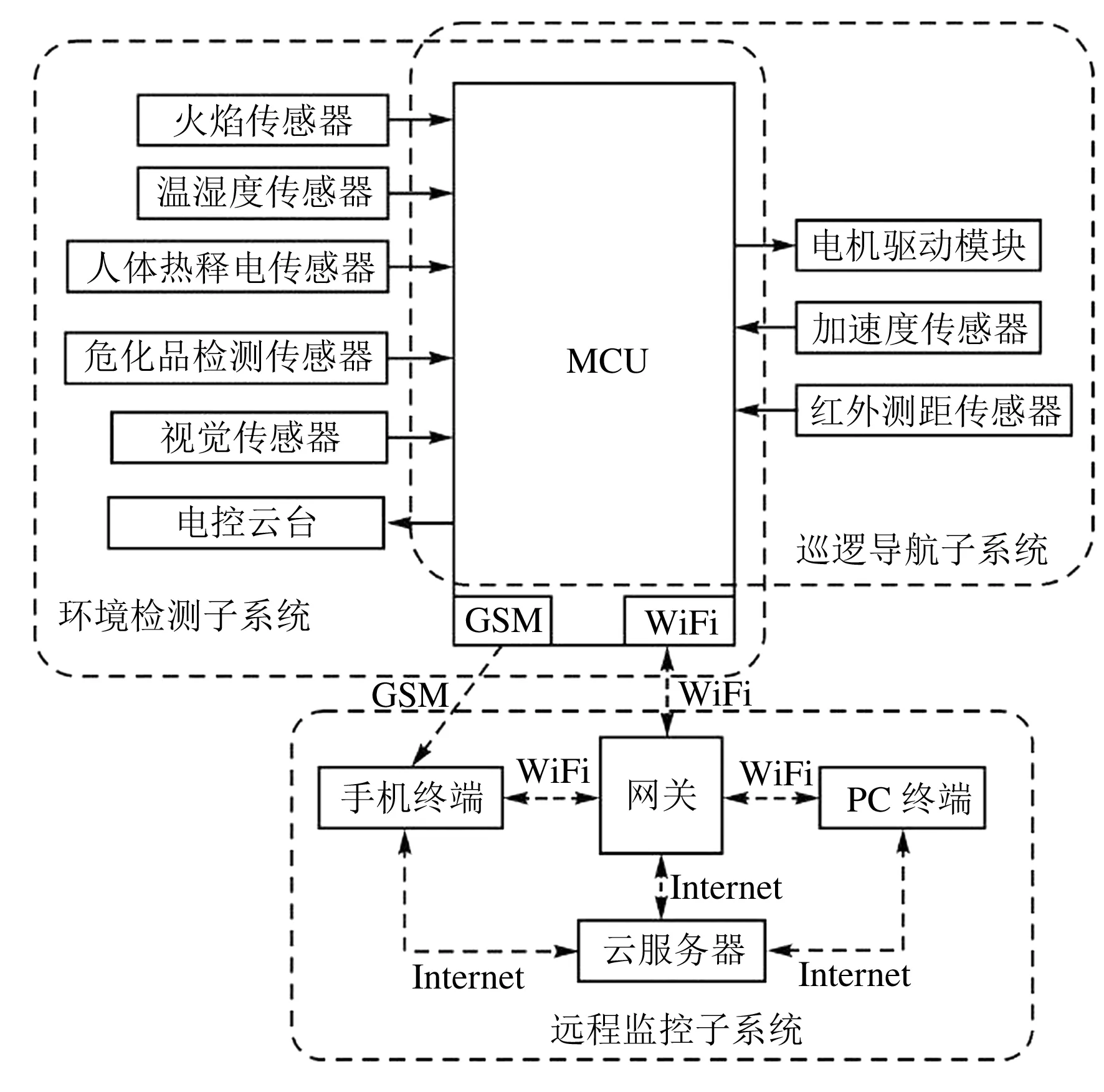
图1 仓储物流智能预警机器人系统结构
2 系统软硬件设计
2.1 自主巡逻导航设计
在物流仓储闭合空间内,预警机器人自主行动功能主要由巡逻导航模块来完成.在硬件系统配置上,主微控制器采用STM32F429IG,电机驱动采用L298N芯片,系统8轴动力供给采用MPU6050芯片、障碍物红外测距监测模块采用E18-D80NK芯片[4].L298N保障了机器人系统的自主运动,红外测距E18-D80NK能够实现仓储环境的障碍物监测,MPU6050实现机器人传动方向角设置和机器人路径规划.机器人在仓储中的巡逻导航模块设计如图2所示.
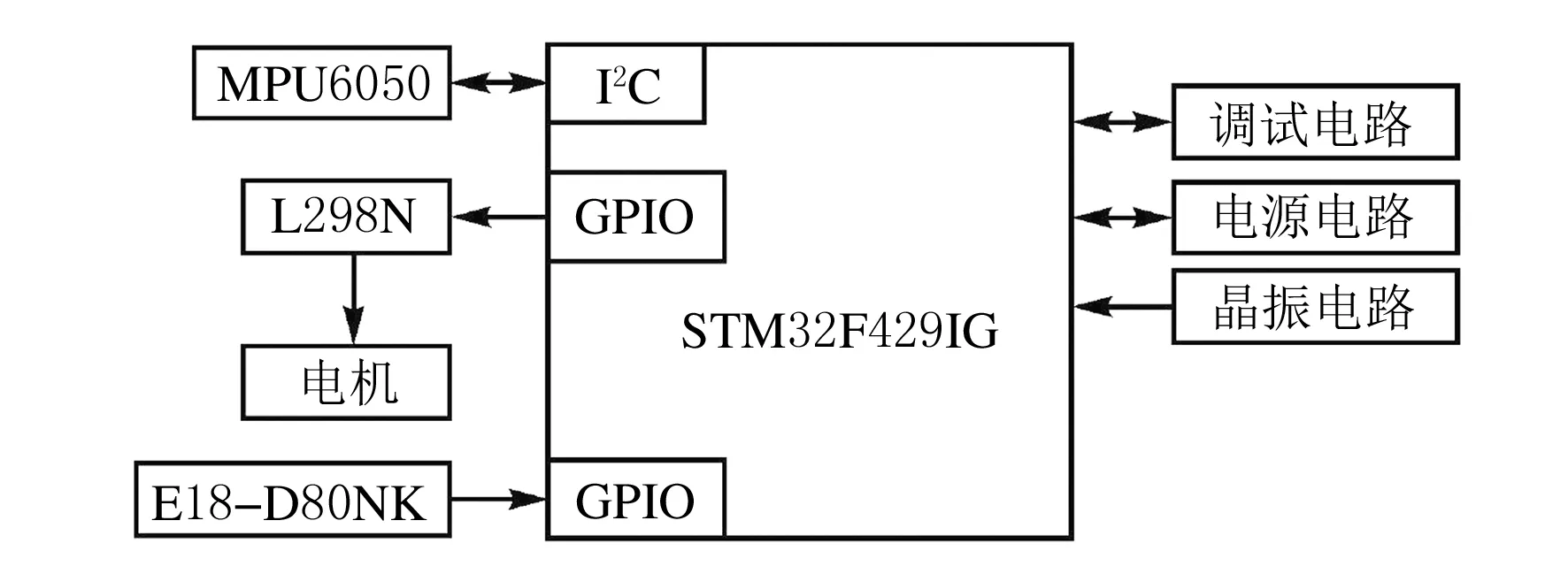
图2 自主巡逻导航系统设计
机器人在室内环境中的自主巡逻采用了红外传感器检测,可行走区域的边界,以左右手法则作为机器人巡逻准则.左手法则设计为:在自主巡逻过程中,当检测到左侧有障碍物(即可行走区域的边界)时,机器人以PID算法与边界保持一定的距离沿着边界前行,直到转完1圈为止[5].在机器人前行的过程中,将行经的路程和转换的方向角不断进行累加,当路程等于预先设定的室内空地巡逻路径周长,且机器人方位的转向角度达到360°时即认为转完1圈.右手法则类似.本系统使用的自主巡逻算法流程如图3所示.
2.2 环境检测子系统设计
物流仓储环境的监测硬件模块主要包括3部分[6]:①火焰传感器RB-02S022A实现火灾数据的感知监测;②危险品泄露监测传感器MQ2实现危化品检测;③微控制器STM32F429IG实现采集数据的集中处理.系统通讯模块主要包括GSM语音与蓝牙双模SIM808芯片、WiFi-RTL8188EUS模块和电控图像采集+云存储.仓储管理人员可以通过机器人车载摄像头实时调取仓储环境监测情况.环境监测模块通过各类传感器实时的对仓储环境数据进行监测与采集,并通过BP神经网络算法进行数据融合.当融合数据接近系统设置的警报值时,智能预警系统自主通过WiFi模块向远程监测平台发出仓储异常警报信号.若警报信号未及时处理,GMS模块SIM808还可以自主实现语音信号的传递.仓储环境监测系统结构如图4所示.
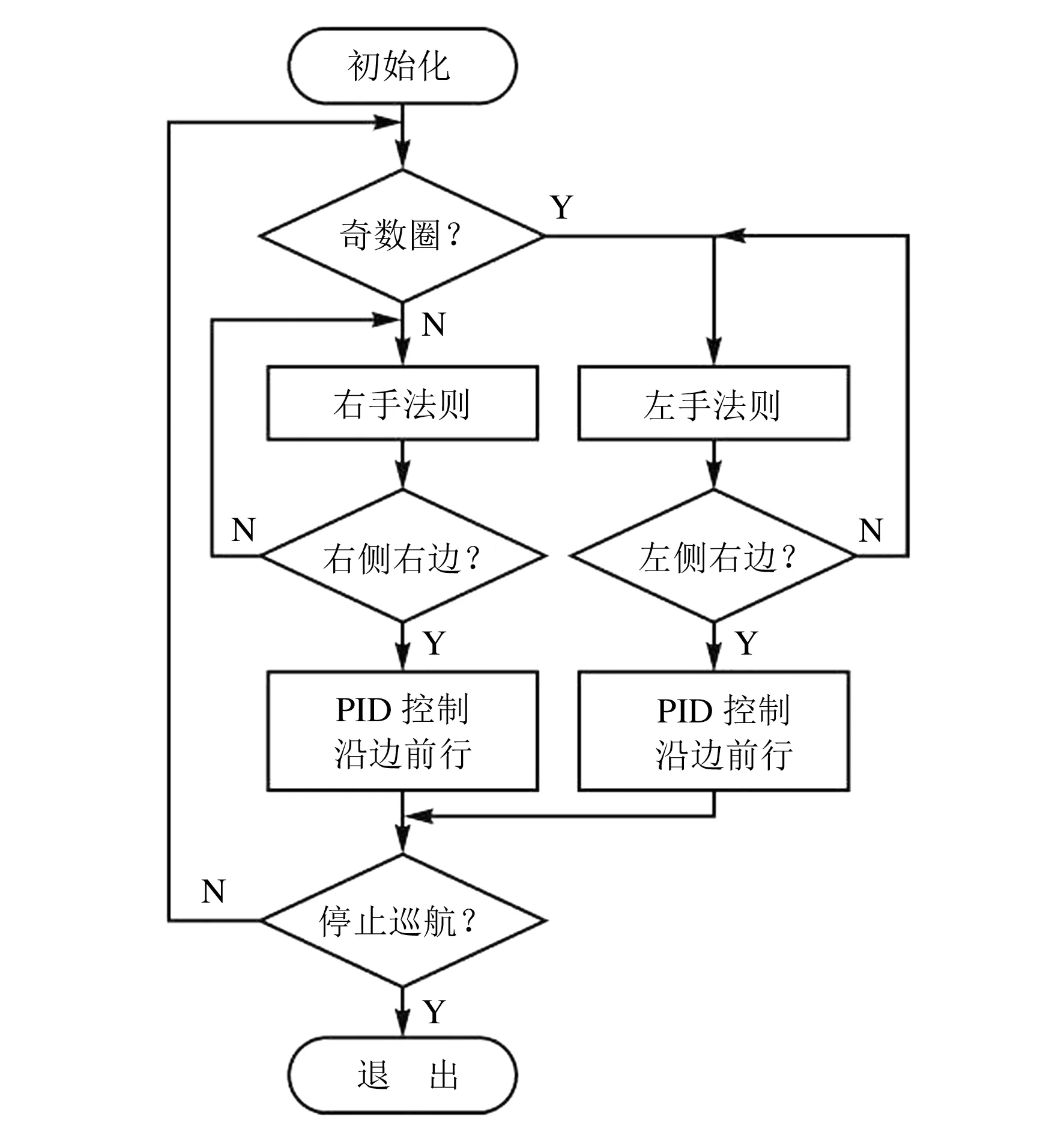
图3 机器人自主巡逻算法流程

图4 环境监测硬件系统设计
2.3 预警机器人远程监控功能设计
预警机器人远程监控功能主要包括机器人控制程序、云存储程序、PC和手机端监控程序.机器人控制程序主要实现数据采集与融合、数据上传、警告发送和接收远程终端控制指令等功能,云存储主要用于接收和存储机器人融合数据,为PC和手机端提供远程数据访问与监控功能.机器人远程工作流程设计如图5所示.
3 多传感器信息采集融合设计
自主巡逻预警机器人搭载了环境监测传感器,通过采集的数据参数来评估仓储环境的危险性[7],但机器人不能轻易判断出环境参数的耦合度.当空气湿度超过50%时,火灾自然的发生概率很低,危险气体的浓度值上限就提高了.当空气湿度小于20%时,易燃易爆危险气体会产生火灾甚至爆炸,造成重大灾害.本系统设计了一套基于BP神经网络算法的多传感器系统融合模型结构(如图6所示),实现了多源传感器数据采集与融合模型来综合评估仓储环境的危险性.
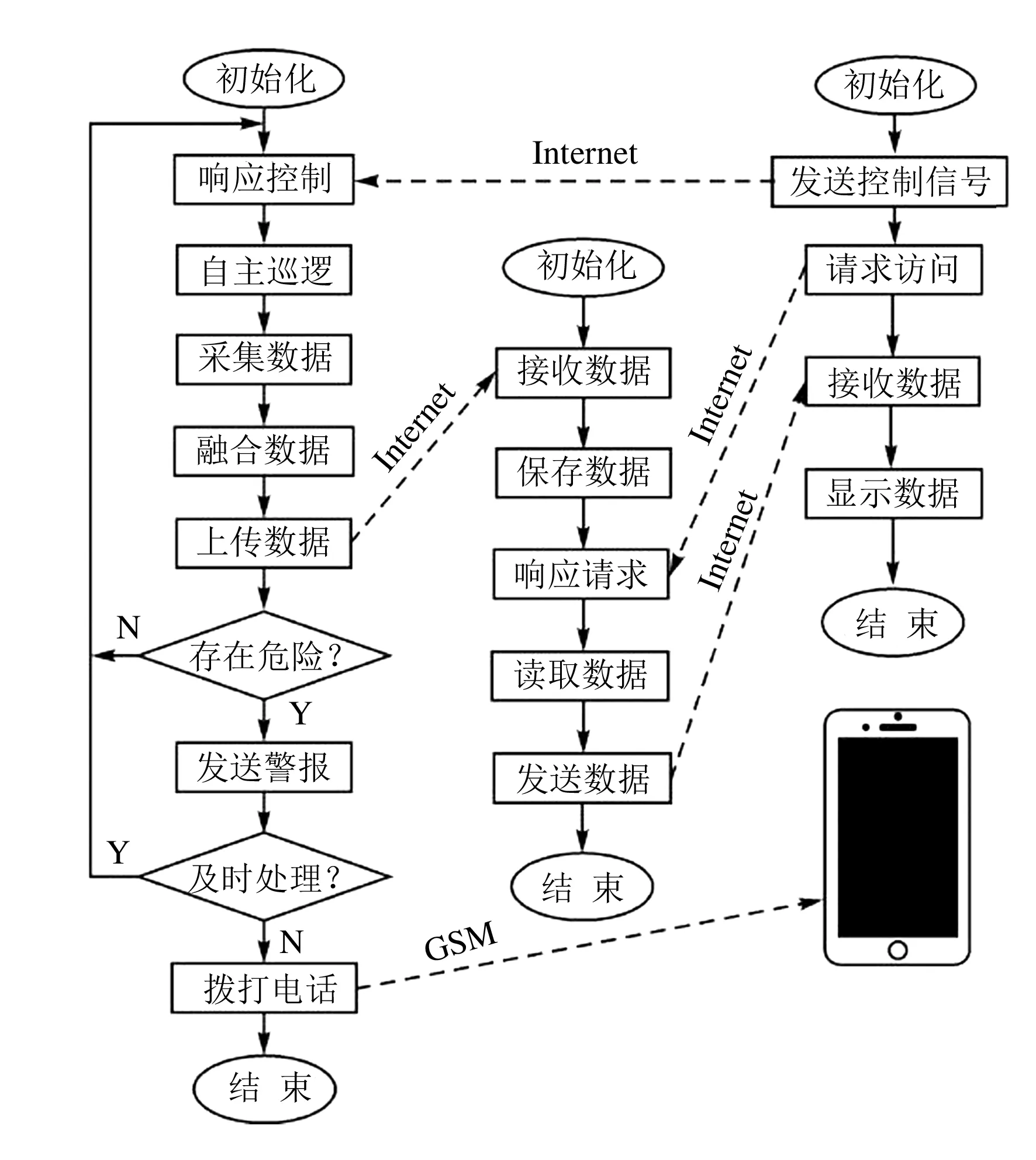
图5 远程监控子系统软件流程图
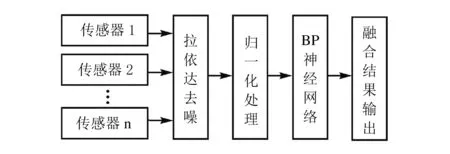
图6 多源信息融合系统
本系统的神经网络模型采用了空气相对湿度y1、绝对湿度y2和危化品浓度综合数据y3作为模型的输入层,警告变量x(0≤x≤1)作为模型的输出层.经过BP神经网络训练的模型参数如表1所列[8].
4 实验及结果分析
为了实现预警机器人系统的测试,在40 m2的室内环境搭建了仓储地形和仓储模拟环境.室内放置了空气加湿与除湿设备来实现仓储环境的湿度控制,冷暖空调系统来实现环境的温度控制.仓储模拟环境搭建如图7所示,其中危险气体泄漏点设置于A点和B点,泄漏气体为CO.

表1 训练后的BP神经网络参数
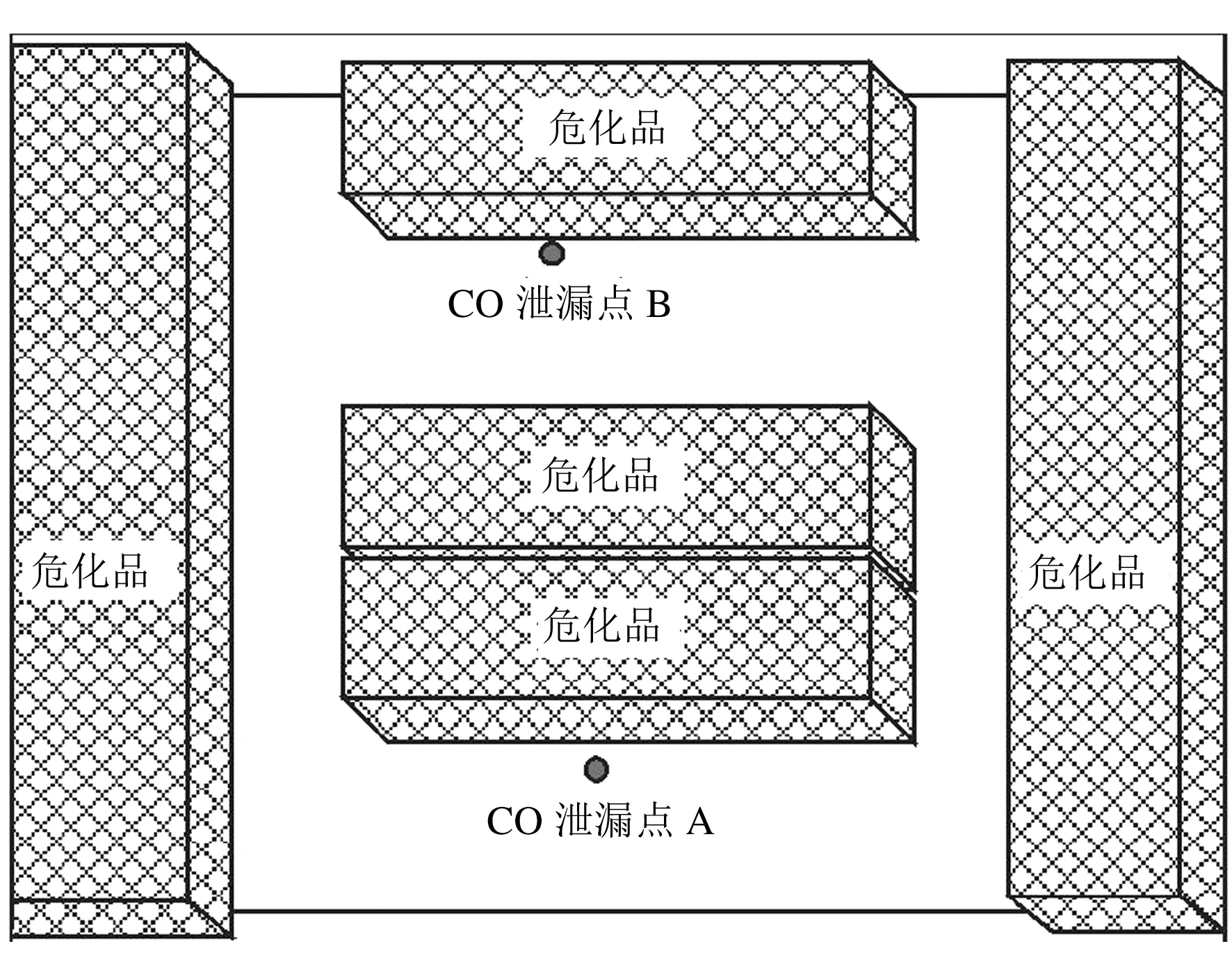
图7 模拟危化品仓库实验环境
4.1 预警机器人的自主巡逻功能测试
预警机器人通过自主巡逻实现危险品泄露检测,是仓储监测预警的重要环节.机器人巡逻测试路线如图8所示.S1节点为巡逻过程中执行右手运动法则的阻碍物边界点,即首次自主巡逻第1圈的起始节点.S2节点为机器人自主巡逻执行左手运动法则的首次发现阻碍物的巡逻第2圈的起始点.S3节点为机器人自主巡逻第3圈的节点.图8中,预警机器人的自主巡逻功能能够实现仓储空间环境的复杂地形自主巡逻.左手运行法则和右手运行法则实现了机器人不同起始节点的全方位仓储环境的巡逻.
当室内环境A与B都发生危险品泄露时,预警机器人都能够快速实现泄露节点的巡逻.测试证明,机器人自主巡逻算法是及时有效的.
4.2 智能预警功能测试
仓储环境安全预警系统功能测试中,机器人自主采集的20组数据进行人工判定,并将预警机器人采集数据的融合信息输出值x(0≤x≤1)作为警告标准.其中规定:x=0代表绝对安全;x=1代表绝对危险.数据越接近于1代表越危险,越接近于0代表越安全.预警系统安全范围为(0,0.3),黄色预警范围设置为(0.3,0.7),红色预警范围设置为(0.7,1.0).系统安全预警的20组测试数据如表2所列.

图8 预警机器人自主巡逻第1、2和3圈路线图
5 结论
基于自主巡逻、多传感环境信息采集监测预警和远程实时监控的智能机器人系统搭载了环境监测传感器,通过采集的数据参数来评估仓储环境的危险性.预警机器人周期性实现仓储环境的数据采集,并将各类数据参数通过BP神经网络融合处理,然后将融合数据通过网络上传到后台服务器,当触发参数报警阈值时,系统自动远程报警.该系统大大提高了物流仓储的智能化管理水平、危险检测处理和实时预警警报的能力.

表2 20组测试数据
猜你喜欢
军事文摘(2022年20期)2023-01-10
英语文摘(2021年11期)2021-12-31
今日农业(2019年12期)2019-08-13
学生天地(2018年19期)2018-09-07
现代园艺(2017年22期)2018-01-19
火控雷达技术(2016年3期)2016-02-06
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
小说月刊(2014年11期)2014-04-18