
基于稀疏矩阵的全聚焦阵列优化算法
2022-02-08 13:39高铁成远桂民
天津工业大学学报 2022年6期
高铁成,王 昊,李 聪,远桂民
(1.天津市光电检测技术与系统重点实验室,天津 300387;2.天津工业大学 电子与信息工程学院,天津 300387)
基于全矩阵数据采集(FMC)的全聚焦成像(TFM)相控阵超声检测技术具有成像分辨率高、对小缺陷灵敏度高的优点[1]。该算法可以在相控阵进行扫查时,依次激励阵列内的每一阵元发射声波,每一次发射后所有阵元进行接收,从而获得检测点的最大信息量,即相控阵可以利用每一发射-接收组合,根据给定的聚焦点,得到最佳的超声检测图像。全聚焦成像技术极大地提高了相控阵扫查图像的分辨率和可靠性。但是,全聚焦技术也存在着非常明显的缺点,它的每一个采集周期都会产生N×N个A扫数据,不仅占用大量的内存而且减缓了扫查速度,很难满足工业领域中快速成像的需求[2]。为了避免产生冗余数据,人们提出了稀疏化阵列的方法,在不明显损失图像质量的前提下,可以根据一定的原则选择部分元素进行有效的检测和成像,减少扫查数据量,从而提高成像效率。
近年来,大量科学家与学者利用基础研究算法对全聚焦稀疏阵列进行设计,研究出一系列的优化方法[3]。Yang等[4]利用最小冗余阵列和遗传算法对超声相控阵二维稀疏阵列进行优化,所得阵列具有更好的一致性和性能;Yamashita等[5]在高分辨率超声测量应用中通过多频率激励方式有效抑制了阵列栅瓣和旁瓣,同时增强了波束偏转性能;Wilson等[6]提出了一种稀疏分布和周期分布相结合的混合波束形成方法,获得了较好的分辨率和旁瓣水平;彭桃[7]采用稀疏阵列的方法在保证一定成像质量的前提下显著提高全聚焦成像效率,并利用遗传算法优化了稀疏阵列的成像性能。
本文运用了2种稀疏算法对阵列进行设计与优化,分别为最小冗余度阵列和遗传算法。基于对以上2种算法的研究,本文建立了一种全聚焦超声成像阵列的优化算法模型:首先,利用最小冗余阵列对相控阵列进行稀疏设计,既保证观测中不出现伪像又做到孔径最大(空间分辨率最高)的阵元分布。然后,利用遗传算法对其扫查图像信噪比进行优化,得到满足条件的最佳阵列。将最终优化后的稀疏阵列与满阵、最小冗余阵、遗传算法优化阵列的声场进行对比,并以此阵列为基础设计相控阵探头,建立全聚焦无损检测扫查环境。通过对连续的20个点缺陷进行扫查测试,验证此方法的可行性和有效性。
1 应用算法概述
1.1 最小冗余阵列
MRLA阵列的设计原则是使具有相同空域相关延迟的阵元传感器对的数量尽可能少[8]。图1为满阵阵列分布及其空间采样频率示意图。

图1 满阵阵列分布及其空间采样频率示意Fig.1 Distribution of full array and its spatial sampling frequency
图1(a)为一个7阵元的线性阵列分布图(黑色表示为此处有阵元),图1(b)为该阵列的空间采样频率图,在横坐标为1处,幅值为6,意思是在该阵列中,阵元间距为1的组合有6组;在横坐标为6处,幅值为1,意思是阵元间距为6的组合有1组。只有增大空间采样频率的长度,使得每种间距(大于等于1)的组合数目都最接近1(不能小于1)时,该阵列才做到冗余度最小[9]。
图2为最小冗余度阵列分布及其空间采样频率示意图。

图2 最小冗余度阵列分布及其空间采样频率示意Fig.2 Distribution of MRLA and its spatial sampling frequency
用归一化的矢量uk来表示一个满阵为M含有N个阵元的最小冗余线性阵列的阵元位置分布。图2(a)中,黑色表示该位置有阵元,白色表示没有阵元。此时,阵列可表示为{1,1,0,0,1,0,1},或以阵列的第一个阵元作为参考点,令u1=0,可表示为{0,1,4,6},即在阵列中0、1、4、6的位置分别有一个阵元,其他位置无阵元。此时,它的阵列孔径长度等于一个7阵元的均匀线性阵列,其空间采样频率如图2(b)所示。
阵列的冗余度R为:在空间采样频率Z中,除去第一个元素外,其余大于1的元素中,超过1的数值之和。在此阵列中,除去4外,其他都是1,所以冗余度最终为0。对于一个最小冗余度阵列,空间采样频率Z中应该没有0值(没有空洞),而且冗余度R应小于等于冗余度的最大允许值B,即:

阵元间相关函数只与阵元间的位置差di,j=uj-ui(其中0≤i≤j≤M-1)有关,即阵元间的位置差di,j是大于等于0的自然数,此时所有阵元位置差的集合为

基于上述假设,最小冗余阵列的设计问题可以通过下面的约束优化问题来描述:

式中:R表示阵列的最小冗余度;L代表孔径数。当L较小时,可以通过穷举法进行计算,随着L的变大,会极大地增加计算,可以通过编程方法减少计算量。
图3所示为计算稀疏阵列及冗余度的程序流程图。

图3 最小冗余度阵列计算流程Fig.3 Calculation flow of MRLA
根据图3流程可求得部分最小冗余度阵列,如表1所示。

表1 部分最小冗余阵列(MRLA)Tab.1 Partial MRLA
1.2 遗传算法
在稀疏相控阵列的问题求解中,可以将满足一定要求的不同阵列看作自然界中的一个种群[10],其中的每一个特定阵列看作一个个体,在迭代前我们需要明确一些要素[11]。
(1)个体适应度评价:个体适应度一般采用比例选择的方式计算迭代过程中保留下来的个体数目,因此,为了合理确定每个个体的保留几率,一般需要保证个体的适应度值为非负数[12]。
一般地,通过以下2种情况来确定个体适应度函数,能够保证函数取值不为负数[13]。
首先,如果最优解问题为最小化的情况时,可以通过以下方式来转换:

Cmin为一个较小的调整参数,通常可根据优化问题人为设置或设置为迭代过程中目标函数出现的最小的值[14]。
其次,如果最优解问题为最大化的情况时,可以通过以下方式来转换:

式中:Cmax为一个较小的调整参数,通常可根据优化问题人为设置或设置为迭代过程中目标函数出现的最小的值[15]。
算法的适应度函数需要计算每个阵列的峰值旁瓣水平[16]。将阵元当作各向同性的点源,则具有N个阵元的稀疏阵列的波束E(u)可以表示为:

式中:dn和In分别表示阵元的坐标和激励振幅;u=cos(θ);θ为波束的偏转角度。本文中所设计的每个阵元幅度均相等,即In=1,同时d1=0,dN=L,因此公式(8)可以简化为:

算法优化的目标为最小化稀疏阵列的峰值旁瓣水平[17],因此,根据阵列峰值旁瓣的含义,遗传算法的适应度函数可以定义为:
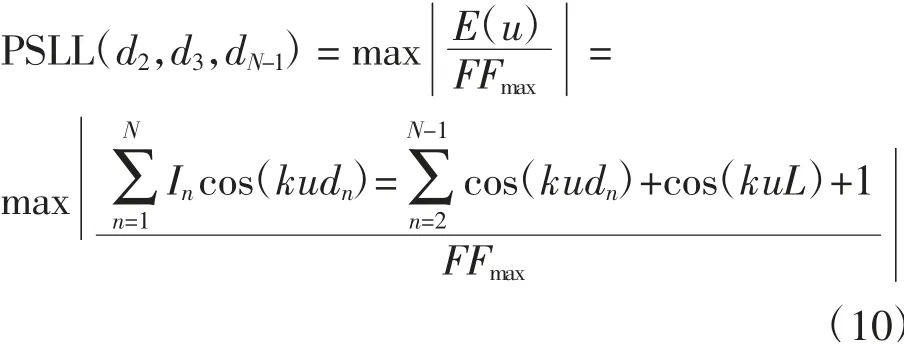
式中:FFmax为波束主瓣的峰值。为了得到具有最小峰值旁瓣水平的稀疏阵列,定义目标函数为:

(2)基本遗传算法的优化参数。通常,需要根据具体的优化问题预先设置种群规模、迭代步数、交叉概率和变异概率这4个优化参数[18]:M为种群规模,表示参与种群进化的个体数量,取值范围20~100;T为迭代步数,表示算法迭代的最大次数,取值范围100~500;Pc为交叉概率,取值范围0.4~0.99;Pm为变异概率,取值范围0.000 1~0.100 0。
4个参数之间相互制约,共同影响着遗传算法的搜索性能[19]和运算结果,因此在实际优化问题中,需要结合最优解问题[20]的特点和具体要求,通过不断尝试,综合考虑各项参数的设置。遗传算法运算示意图如图4所示。

图4 遗传算法运算过程示意图Fig.4 Operation process of genetic algorithm
2 算法综合
2.1 单算法波束图仿真
最小冗余度阵列实质上是在阵元数目一定的情况下,既保证获取信息量的冗余值最小又做到孔径最大(空间分辨率最高)的阵元分布。根据上述流程求得满阵数7稀疏阵元数4的最小冗余度阵列为{1,1,0,0,1,0,1},其声场波束图与满阵进行对比如图5所示。
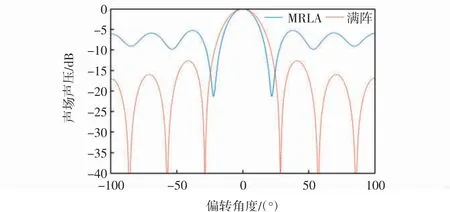
图5 最小冗余度阵列波束图Fig.5 MRLA beam pattern
由图5可知,稀疏后的阵列因为阵元间距增大,主瓣宽度随之变窄,提高了横向分辨率。但是稀疏阵列减少了阵元数目,旁瓣增大,有可能出现图像模糊、伪像等现象。
为了验证遗传算法对稀疏阵列求解的优化性能,必须从可能的大量阵列中选择最好或者较好的结果。图6为3组不同稀疏阵列的优化仿真结果。
从图6中可以看出,采用论文中介绍的遗传优化方法及相关参数,在对7选4、27选6以及32选20这3种稀疏阵列的优化中,均能够较快地获得最优的阵列分布,通过对优化阵列进行波束图仿真,优化后的阵列波束具有良好的旁瓣特性。

图6 遗传算法优化阵列仿真结果Fig.6 Simulation results of optimization of array by GA
2.2 算法综合仿真
基于上述2种稀疏阵列算法,若单独使用最小冗余阵列,得到的稀疏阵列则可以获取冗余度信息最小情况下的最大信息量,但是只是在对阵列进行分析的层面,这会导致稀疏后的阵列超声旁瓣过大,图像模糊,甚至容易出现伪像;若单独使用遗传算法稀疏阵列,则可以得到要求下的最优阵列,具有良好的旁瓣特性,但是没有考虑空间采样频率,得到的图像容易出现遗漏信息。本文将2种算法进行综合使用,利用最小冗余度阵列对阵列进行稀疏设计,利用遗传算法对其扫查图像信噪比进行优化,这样得到的图像既可获得最小冗余下的最大信息量又具有良好的旁瓣特性,同时阵列稀疏化,可以极大地提高全聚焦扫查速率,如图7所示。

图7 阵列优化对比Fig.7 Comparison chart of array optimization
以37阵元满阵基础上设计16有效阵元地稀疏阵列问题为例,参考表1中第6行阵列(11010010000 00100000010000001000100011),首先利用最小冗余度阵列确定16个阵元中的10个,此时稀疏阵列优化问题变成在27个位置中放置其余地6个阵元。在27选6的优化设计中,利用遗传算法进行求解,程序求得阵列为1101011001010100101010001001000100011。图7(a)所示,MRLA标识图线为最小冗余度阵列声压波束图,此时最高旁瓣为-5.856 8 dB。图7(b)为遗传算法优化后的阵列,此时最高旁瓣为-10.759 6 dB,明显优于最小冗余阵列。
2.3 算法对比
粒子群算法(PSO)同样是一种仿生全局优化算法,主要模拟鸟类觅食、人类社会行为而提出,该算法实现简单,在解决非线性问题中有着较好的表现。将37选16优化前的阵列利用粒子算法进行稀疏的阵列声压图如图8所示。

图8 PSO优化阵列波束图Fig.8 Beam pattern of PSO optimized array
由图8可知,稀疏阵列的最高旁瓣-10.429 2 dB,优化效果略差于GA算法。而且PSO算法有着收敛过快、易收敛于局部极值的特性,本文所得到的稀疏阵列最后需要用于全聚焦扫查,算法应该具有可靠性,PSO算法未经改进的情况下不适宜用于多阵列的稀疏情况。本文所设计的稀疏优化算法可以完全避免出现只优化为局部极值的情况。
3 扫查试验测试
为了验证稀疏阵列算法对于改善全聚焦成像效率的有效性,本文建立了一个全聚焦相控阵超声检测环境,除探头内阵列稀疏化方式不同外,其余参数皆设置为固定值,如表2所示。

表2 超声探头参数表Tab.2 Ultrasonic probe parameters
取3组阵列进行对比测试:A为16有效阵元最小冗余阵列(满阵37阵元);B为遗传算法优化后的稀疏阵列;C为37阵元满阵阵列。扫查目标为连续的20个点缺陷,测试结果如图9所示。

图9 点缺陷扫查图Fig.9 Scanning chart of point defects
从图9中看出,满阵阵列C图像清晰,缺陷位置、状态明显可辨,其余部分的噪声情况也有很好的水平,最小冗余阵列A尽管仍可以较清晰地分辨出缺陷的个数和位置,但是图像中存在明显的伪影,形态模糊,而通过遗传算法优化后的稀疏阵列B扫查的图像有较为明显的优化,检测图像的信噪比有明显的提高,符合上述分析,最小冗余阵列可以捕获到最小冗余信息下的最大信息量,但是旁瓣增高,有可能出现图像模糊、伪影等现象,而优化后的图像有良好的旁瓣特性,虽然没有满阵阵列的图像清晰,但是在不产生噪声伪影的情况下可以极大地提高扫查效率。
4 阵列优化分析
对一个全聚焦阵列最为直观的评价参数即为其扫查效率,不同稀疏度的阵列对扫查效率有着决定性的影响,阵列稀疏化越大,相比于满阵的扫查越快,但是图像质量也会明显降低。保持除阵列稀疏率之外的其他参数不变,不考虑图像中缺陷点的成像质量,按照上述扫查过程记录各个阵列的时间,以满阵为基准的百分比统计结果如图10所示。

图10 扫查效率Fig.10 Scanning efficiency
由图10可知,由于阵列中阵元数目的减少使得计算数据量大幅度降低,很大程度上提高了扫查效率,全聚焦实时扫查得以实现,稀疏率为0.27的阵列较满阵成像效率提高了58.3%,说明了在全聚焦成像中采用阵列稀疏化方法的有效性。
针对阵列评价本文引入一个参数API,它是表征阵列波束点扩散函数的空间大小的一个无量纲值。API的大小定义为:点扩散函数中幅度高于最高赋值的-6 dB的区域面积A-6dB,并以波长的平方进行归一化。API数值越小,表明检测分辨率越高。表3列出了阵列API值。

表3 阵列API值Tab.3 API value of array
由表3可见,随着对阵列进行稀疏化处理,阵列API值也会相应地小幅度增大。API的小幅度增大在一定范围内不会对扫查成像造成影响。但是,当稀疏率低于0.27时,API会急剧增大,扫查分辨率会有极大程度的降低。
5 结论
本文将阵列稀疏化方法应用于全聚焦成像技术中,研究了全聚焦超声相控阵列的优化问题。传统的FMC技术需要采集所有的A扫信号,因此它的图像中包含了阵列所能检测的最大信息量,会极大程度地减缓扫查速度。本文提出了一种稀疏矩阵全聚焦超声成像算法模型,利用最小冗余阵列对相控阵列进行稀疏设计,利用遗传算法对其扫查图像信噪比进行优化。通过对比波束图和采用稀疏阵列对单点缺陷进行扫查成像,证明37稀疏16阵列利用此算法稀疏后最高旁瓣有4.902 8 dB的优化;对于多阵列的稀疏优化,GA算法比PSO算法更具有可靠性;稀疏率为0.27的阵列相比于满阵其成像效率有58.3%的提高,且API值为0.539 7,不会对缺陷成像造成较大影响。
猜你喜欢
运输经理世界(2022年1期)2022-09-20
舰船科学技术(2022年11期)2022-07-15
光学精密工程(2022年4期)2022-03-11
设备管理与维修(2021年17期)2021-11-02
建材发展导向(2020年23期)2020-12-31
海军航空大学学报(2020年2期)2020-07-27
中国特种设备安全(2019年1期)2019-03-13
四川水泥(2019年3期)2019-02-19
电子技术与软件工程(2017年12期)2017-07-05
科教导刊(2017年9期)2017-06-09
