
一种异步电机弱磁控制方法仿真分析*
2022-02-10 08:37王发良
南方农机 2022年2期
王发良
(景德镇学院机械电子工程学院,江西 景德镇 333000)
异步电机因结构简单、成本低而被广泛应用于各种工业控制场合[1]。然而,在一些工业场合中,要求异步电机高速运行,而传统的控制方法在异步电机额定转速以上提速困难[2]。因此,为了使异步电机能够高速运行,需要对异步电机的弱磁控制方法进行研究,笔者提出了一种结合速度环和电压环励磁电流给定的异步电机弱磁控制方法,并在MATLAB/Simulink环境中搭建仿真模型,进行仿真验证。
1 异步电机转子磁链定向下的数学模型
在同步旋转坐标系下的异步电机电压方程为[3]:

稳态情况下,可将电机模型进行简化:

由式(3)、(4)可知,当电机的转速很高时,反电动势项很大,此时可以不考虑定子电阻上压降的影响,则式(3)、(4)可写为:

电磁转矩为:

式中:p/2表示电机的极对数。
2 异步电机弱磁控制方法
逆变器最大输出电压受直流母线电压值、电机耐用等级等因素影响[4]。此外,为确保电机安全运行,还需对电机绕组承受的电流进行约束。式(8)为电压、电流约束条件[5]:

将式(5)、(6)代入式(8)中,可得:
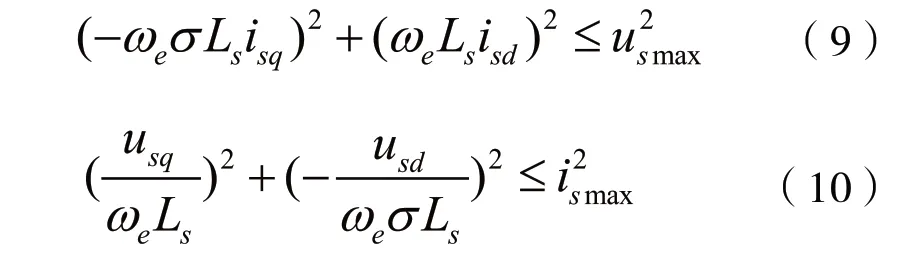
从式(9)、(10)可以看出,电机电流应该同时满足这两个式子,即电流轨迹被限制在式(9)和式(10)电流解的交集内,且这个集合随转速的增大而减小;同理,电压轨迹被限制在式(9)和式(10)电压解的交集内,此集合随转速的增大而增大。
由式(9)可知,受逆变器输出最大电压的限制,电机转速不可能无限上升,为了尽可能地扩大转速极限输出范围,只能通过降低励磁电流来实现。因此,励磁电流的控制是实现弱磁升速的关键[6]。
目前,常见的弱磁控制方法包括以下几种:
1)传统弱磁控制方法。传统的弱磁控制方法采用的是根据速度区间划分,分段给定励磁电流:当速度处于额定转速以下,给定的励磁电流为常值;当速度运行至额定转速以上时,给定励磁电流的值与实际转速成反比[7]。此方法控制简单、易于理解,但未考虑电压约束,因此弱磁控制效果不理想。
2)输出转矩最大化的弱磁控制方法。此方法通过励磁电流和最大转矩电流分别进行控制,能够实现输出转矩最大[8],但由于励磁电流和最大转矩电流是分开控制的,增加了控制器的数量,使得需要调节的参数数量增加,实现起来相对比较困难。输出转矩最大化的弱磁控制方法原理框图如图1所示。
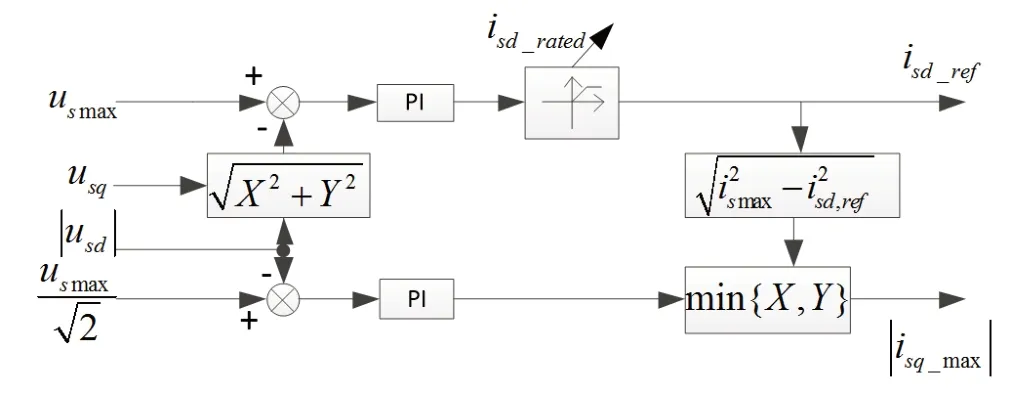
图1 输出转矩最大化的弱磁控制方法原理框图
3)基于电压闭环的弱磁控制方法。电压闭环的弱磁控制方法的思想,即将电机实际运行在某个速度所需的电压值和逆变器能提供的最大电压值作差[9],并将二者的差值输入到PI控制器中。当二者的差值大于零,表明逆变器提供的最大电压值无法满足电机弱磁升速的要求,此时应减小励磁电流,以达到升速的目的;若二者的差值小于零,表明逆变器提供的最大电压值足以满足弱磁升速的要求,可以增大励磁电流[10]。基于电压闭环的弱磁控制方法原理框图如图2所示。
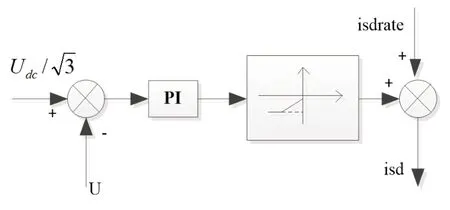
图2 基于电压闭环的弱磁控制方法原理框图
4)考虑零矢量作用时间的弱磁控制方法。传统的SVPWM中,逆变器的六个开关器件的开关组合构成了六个基本电压矢量和两个零电压矢量,逆变器的最大输出电压为六个基本电压矢量构成的六边形的内切圆半径,任意的逆变器的输出电压可由两个基本电压矢量和零矢量组合而成,且两个基本电压矢量的作用时间与零矢量作用时间之和应该小于等于逆变器的开关周期。当零矢量作用时间小于逆变器开关周期与两个基本电压矢量作用时间之差时,也即此时逆变器输出的电压无法满足电机升速的要求,需要进行弱磁控制[11-13]。
励磁电流也是分段给定的:在恒转矩区域,励磁电流给定值一般选取为电机额定电流的0.5~0.8倍[14],当运行在弱磁区域时,将逆变器的开关周期与两个基本电压矢量作用时间之和作差。当二者之差大于零,即零矢量作用时间大于零,减小励磁电流;当二者之差小于零,即零矢量作用时间小于零,增大励磁电流[15]。此方法能够提高母线电压的利用率,但是励磁电流需要根据经验选取,因此无法实现最优控制[16]。基于零电压矢量作用的弱磁原理框图如图3所示。

图3 基于零电压矢量作用的弱磁原理框图
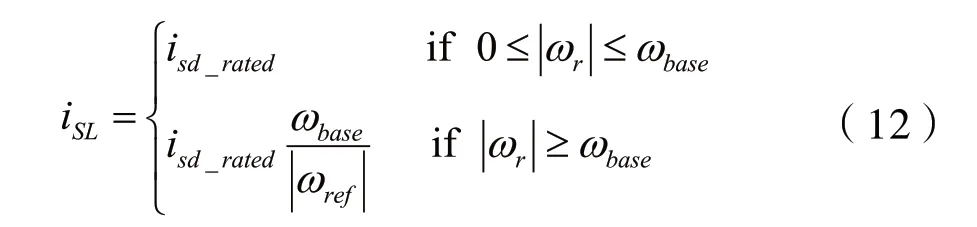
通过对以上弱磁控制方法的对比分析,本文的励磁电流给定方式如式(11)所示,结合传统弱磁控制方法和电压闭环的弱磁控制,励磁电流由与速度相关的励磁电流iSL和电压环励磁电流iVL共同给定:

速度函数励磁电流iSL为:
电压环励磁电流iVL给定方式如图4所示。

图4 电压环励磁电流结构框图
3 仿真结果及分析
在MATLAB2018b中搭建基于矢量控制的异步电机弱磁控制仿真模型,仿真结果如下:
当给定转速为400 rad/s,速度响应波形如图5所示。由速度响应波形可知,采用本方法能够很好地跟踪弱磁区域的速度,并且响应速度快,且几乎无超调,稳定误差也较小。
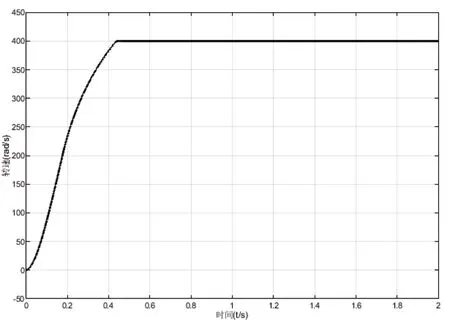
图5 转速波形
磁链电流波形如图6所示,由图6可知,在0.18 s时,逆变器输出的电压无法使电机继续升速,因此,励磁电流自动减小以达到继续升速的目的。在0.44 s时,速度达到给定值,故励磁电流不再减小,并最终稳定在一个常值不变。
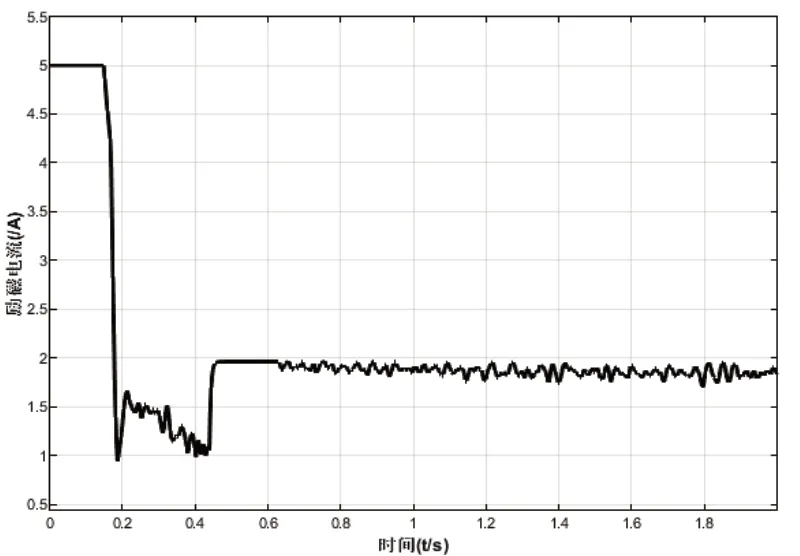
图6 励磁电流波形
4 结论
与传统的弱磁方法相比,本文提出的弱磁控制方法参数敏感性小,并且能够充分利用直流母线电压,扩大转矩输出范围及转速输出范围。仿真和实验研究表明:本方法工程实现简单、通用性较强,各运行区间电流过渡平稳,对提高异步电机转矩输出能力有显著改善作用。
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2022年3期)2022-06-17
大电机技术(2022年2期)2022-06-05
防爆电机(2022年2期)2022-04-26
防爆电机(2022年1期)2022-02-16
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
汽车维修技师(2019年7期)2020-01-16
汽车维修技师(2018年11期)2018-05-11
电子制作(2018年1期)2018-04-04
