
倾斜悬浮面高速磁浮列车被动导向特性研究
2022-02-11 13:29高黎明
微特电机 2022年1期
高黎明
(中铁第四勘察设计院集团有限公司 电气化设计研究院,武汉 430063)
0 引 言
1934年德国Hermann Kemper申请了磁浮铁道专利,由于其打破了传统轮轨接触运行瓶颈,吸引了世界多个国家对其进行研究[1-2]。在经历了20世纪60年代的加速期、70~80年代的成熟期和90年代的试验期后,德国高速磁浮列车最终于2003年在上海首次实现了商业化运营,运营速度为430 km/h[3-4]。但由于其悬浮系统与导向系统分别独立设置,需要两套独立的控制系统,结构复杂,且驱动电机高速时驱动力弱,速度很难进一步提高。为此,本文提出了一种集悬浮导向驱动于一体的倾斜悬浮面高速磁浮方案。相比于传统常导高速磁浮,该方案结构更为简化,且可增大电机励磁磁极宽度,从而进一步增大驱动力,以适用于更高速度工况。
有限元数值计算是常导吸力电磁悬浮电磁力的直接准确的计算方法,但有限元数值计算不能给出各变量参数之间的内在关系[5-7]。常用的解析计算方法是通过建立磁路模型,求得气隙均匀磁密后,利用磁场虚位移法,得到电磁力,但该方法忽略了线圈漏磁及磁极边缘效应的影响[8-10]。文献[11-12]利用四角几何及保角变换方法对考虑了磁极边缘效应影响的电磁力进行了求解,求得的电磁力包含垂向悬浮力与侧向导向力。
基于以上研究,本文对考虑了列车平移及旋转影响下的倾斜悬浮面高速磁浮电磁力解析表达式进行了推导,建立了相应的3D有限元模型,验证了解析表达式的准确性;最后分析了系统被动导向特性及极面宽度、倾斜角对系统导向性能的影响。
1 倾斜悬浮面高速磁浮
本文研究的倾斜悬浮面高速磁浮方案示意图如图1所示。图1中,两侧电磁铁与钢轨长定子线圈及铁心相互作用,实现列车悬浮导向驱动功能。相比于传统常导高速磁浮,该方案集悬浮导向驱动于一体,结构更为简化。

图1 倾斜悬浮面高速磁浮示意图
本文主要研究倾斜悬浮面高速磁浮列车被动导向特性。为简化运算,忽略轨道长定子线圈齿槽对电磁力的影响,得到单磁铁倾斜悬浮面高速磁浮示意图如图2所示。图2中,Wm、Lm分别为电磁铁极面宽度与长度,坐标原点位于车体质心处。
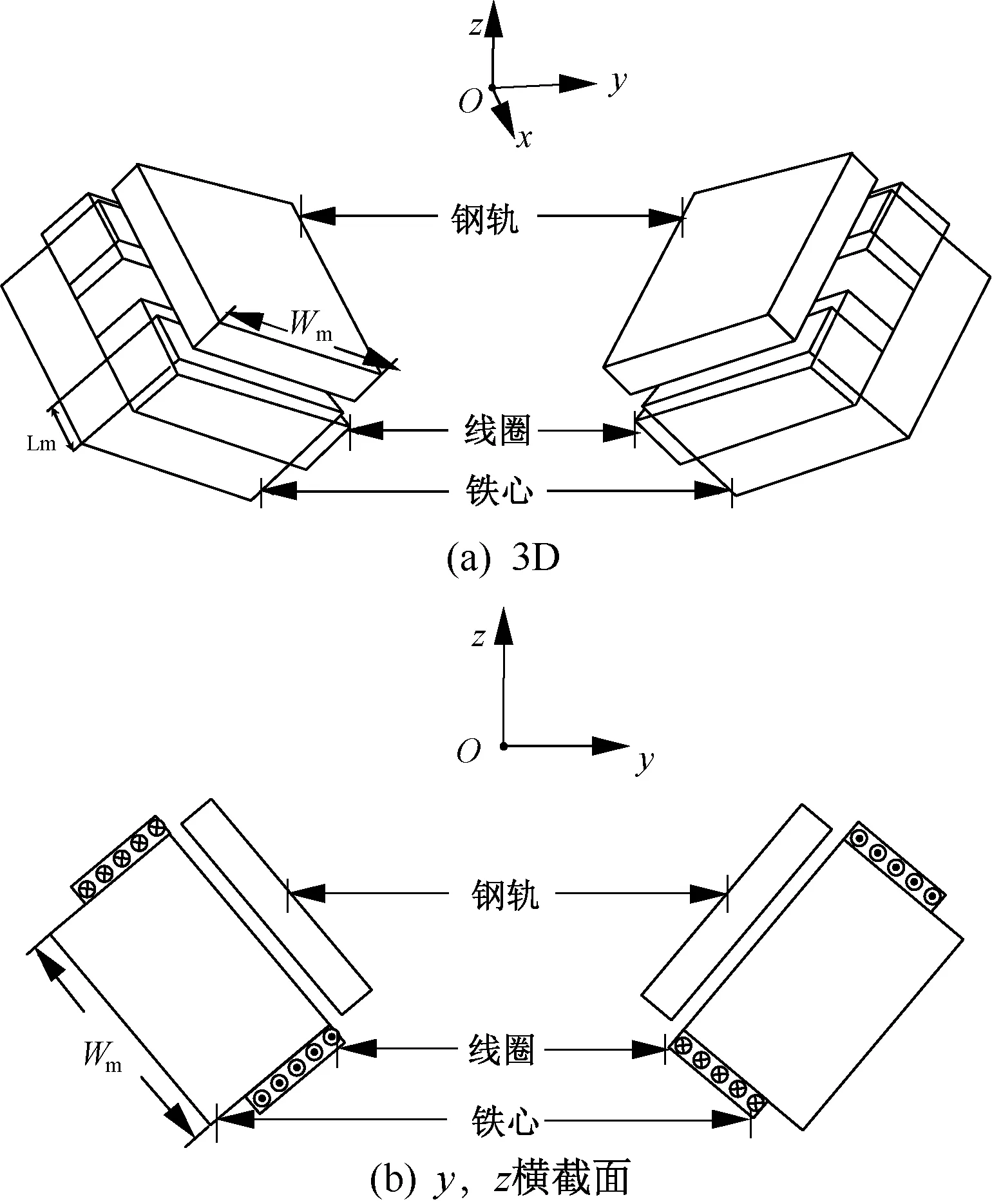
图2 单磁铁倾斜悬浮面高速磁浮示意图
2 电磁力计算
2.1 偏移量计算
当车体以坐标(Δy, Δz, Δθ)发生平移及旋转时,车载电磁铁与轨面间将产生相应的偏移量与气隙。
图3为车体发生Δθ旋转示意图。设右侧电磁铁极面中心点P到右侧轨面的垂点A坐标为(x,l, -h),设该轨所在直线斜率为k(k=tanα,α为轨面倾斜角),则直线方程:
z=k(y-l)-h
(1)

图3 车体发生Δθ旋转
可得该直线方向向量:
(2)
利用坐标旋转变换公式:
(3)
可求得电磁铁中心坐标P(x,m, -n)旋转Δθ角度到Q点后的坐标,进而求得PQ:
PQ=(m(cosθ-1)+nsinθ,msinθ+n(1-cosθ))
(4)
式中:
(5)
式中:δ0为额定气隙,α为轨面及电磁铁倾斜角。则车体发生Δθ旋转后的右侧电磁铁与钢轨之间的偏移量:

[m(cosθ-1)+nsinθ+kmsinθ+kn(1-cosθ)]
(6)
同理可求得车体发生Δθ旋转后左侧电磁铁与钢轨之间的偏移量:
[m(1-cosθ)+nsinθ+kmsinθ-kn(1-cosθ)]
(7)
当车体发生(Δy, Δz)平移时,可求得左右偏移量分别如下:
βr2=Δycosα+Δzsinα
(8)
βl2=-Δycosα+Δzsinα
(9)
因此,当车体以坐标(Δy, Δz, Δθ)平移及旋转时,车载左右两侧电磁铁与钢轨间产生的偏移量:
βr=βr1+βr2
(10)
βl=βl1+βl2
(11)
2.2 气隙计算
当车体发生旋转时,由于旋转角度一般不大,为简化计算,在旋转过程中,假设电磁铁极面与钢轨轨面间保持平行,取电磁铁极面中心点到轨面的距离为气隙值。在图3旋转基础上,车体发生平移,则可得车体以坐标(Δy, Δz, Δθ)平移及旋转后,右侧电磁铁极面中心点Q′坐标为(mcosθ+nsinθ+Δy,msinθ-ncosθ+Δz)。
利用点Q′到直线l的距离公式,可求得当车体以坐标(Δy, Δz, Δθ)平移及旋转时,右侧电磁铁与轨面气隙:
(12)
同理,求得左侧电磁铁与轨面气隙:
(13)
2.3 电磁力计算
根据文献[11-13],考虑磁极边缘效应的影响,可得到倾斜悬浮面高速磁浮列车平移或旋转时的单侧电磁吸力及回复力分别如下:
(14)
(15)
式中:μ0为真空磁导率;N为线圈匝数;I为线圈电流;β为车载电磁铁与钢轨间产生的偏移量;δ为车轨间的气隙。
将式(10)~式(13)代入式(14)、式(15),即可求得车体以坐标(Δy, Δz, Δθ)平移及旋转时左右两侧的电磁吸力与回复力Fr⊥、FrP、Fl⊥、FlP。
将所求的左右两侧电磁吸力及回复力在y、z方向进行分解,可得车体左右两侧垂向悬浮力与水平导向力分别如下:
Fyr=Fr⊥sin(α+θ)+FrPcos(α+θ)
(16)
Fzr=Fr⊥cos(α+θ)-FrPsin(α+θ)
(17)
Fyl=Fl⊥sin(α-θ)+FlPcos(α-θ)
(18)
Fzl=Fl⊥cos(α-θ)-FlPsin(α-θ)
(19)
分析水平偏移时,假设左右电磁铁垂向悬浮力之和等于车体重力,且系统转矩为0,则可求得左右线圈电流安匝数:
(20)
(21)
式中:m为车体质量;g为重力加速度,且:

(22)

(23)
(24)
(25)
进而可以求得左右电磁铁垂向悬浮力及水平导向力:
Fzr=A(NIr)2
(26)
Fzl=B(NIl)2
(27)
Fyr=C(NIr)2
(28)
Fyl=D(NIl)2
(29)
同理,当分析旋转运动时,假设左右电磁铁垂向悬浮力之和等于车体重量,且水平导向力合力为0,则可求得左右线圈电流安匝数及系统电磁力。
3 有限元数值计算
图4为本文利用ANSYS Maxwell有限元软件搭建的倾斜面高速磁浮3D有限元数值计算模型[14],其中模型参数如表1所示。3D模型建立条件:线圈材料采用铜,钢轨及铁心材料为铁,手动划分网格,设置自然边界条件。图5为气隙磁密矢量图。由图5可见,磁场存在边缘效应,故相比于根据磁路模型所得到的电磁力,本文推导的电磁力解析计算结果更为准确。
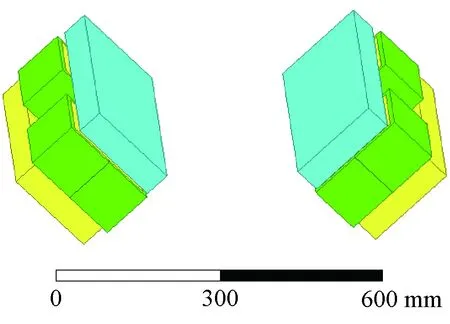
图4 3D有限元模型

表1 倾斜悬浮面高速磁浮参数
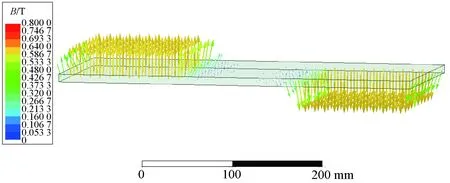
图5 气隙磁密矢量图
当车体左右平移或旋转时,左右两侧电磁铁水平导向力有限元计算与解析计算结果对比分别如图6、图7所示,旋转运行时,左右水平导向力近似重合。由图6、图7可见,电磁力解析计算结果与有限元数值计算结果吻合较好,验证了本文所推导的电磁力解析表达式的准确性。从图8、图9电磁力的解析解与有限元数值计算结果相对误差可以看出,当车体在-2 mm~2 mm范围内的水平移动时,水平导向力及垂向悬浮力最大相对误差分别为4.93%及4.95%;而车体在-0.5°~0.5°范围内旋转时,水平导向力及垂向悬浮力最大相对误差分别为4.09%及4.23%,表明了本文的解析解精确性较高,满足工程计算要求。
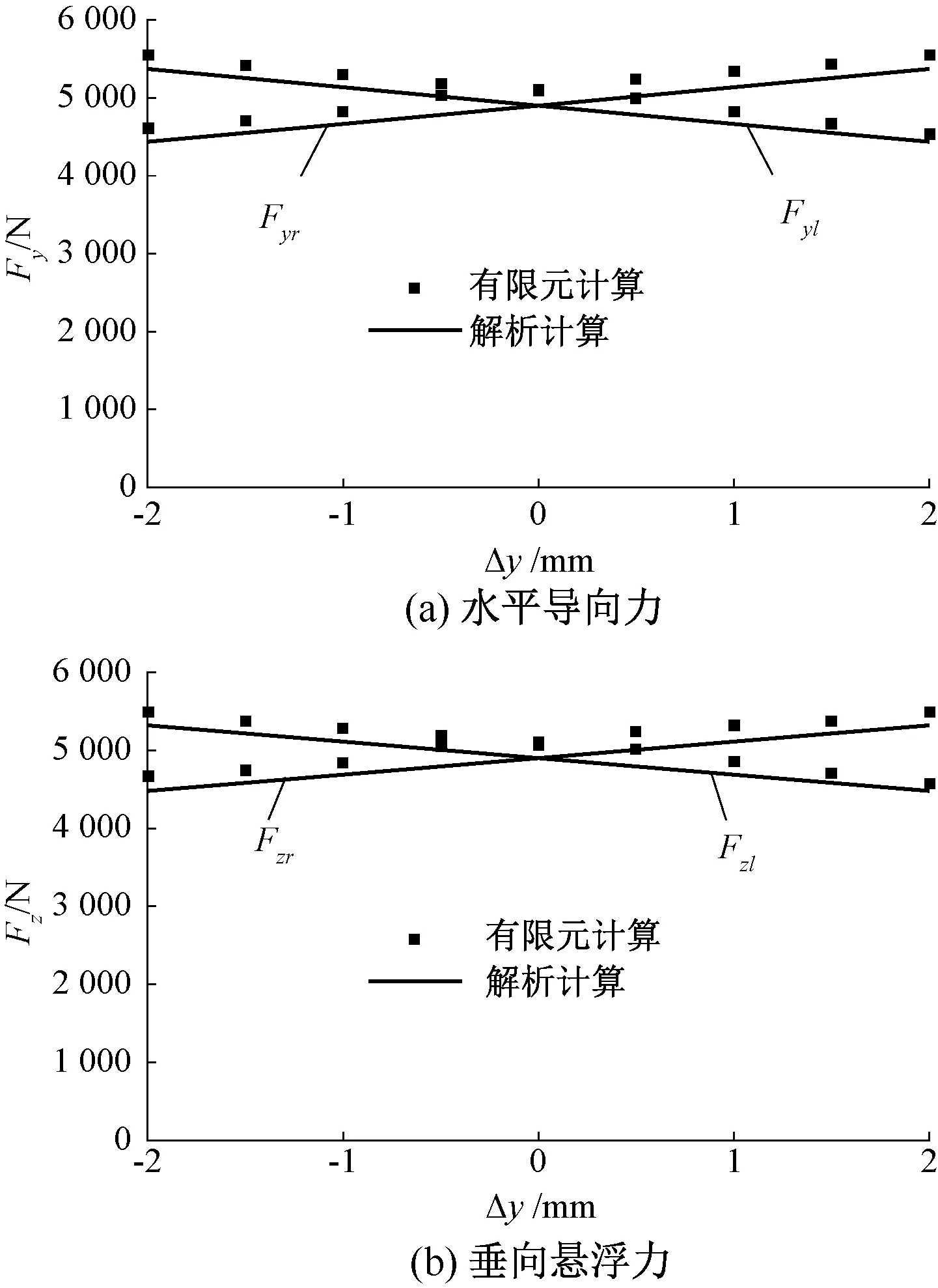
图6 水平偏移时,电磁力解析解与有限元对比

图7 旋转运行时,电磁力解析解与有限元对比
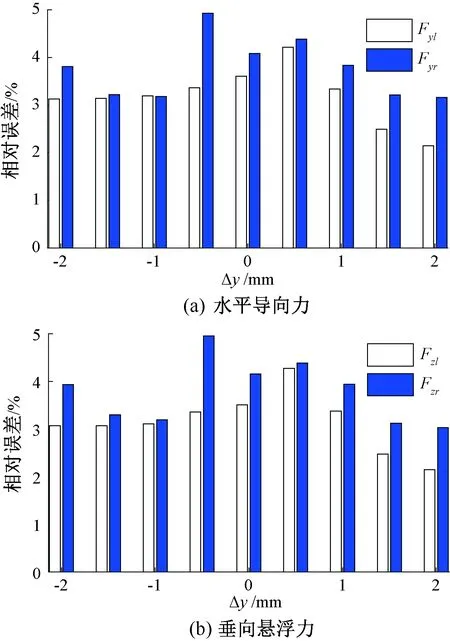
图8 水平偏移时,电磁力解析解与有限元相对误差
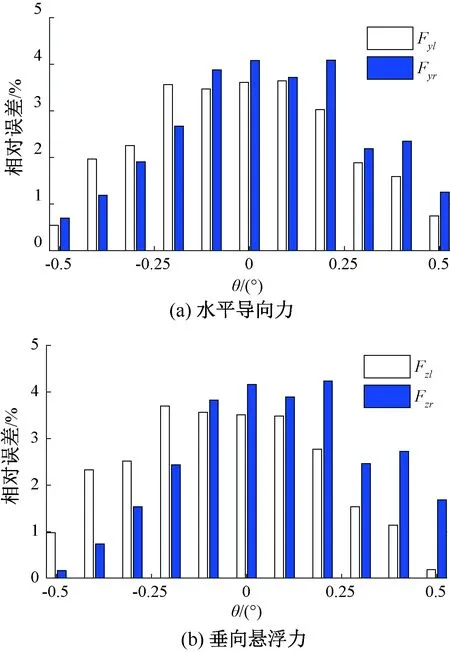
图9 旋转运行时,电磁力解析解与有限元相对误差
图10为车体所受水平导向力ΔFy(ΔFy=Fyl-Fyr)随水平位移的变化曲线。从图10中可以看出,当车体向左侧水平移动时,左侧水平导向力大于右侧水平导向力;而车体向右侧水平移动时,右侧水平导向力大于左侧水平导向力。图11为系统转矩随旋转角度的变化曲线。由图10、图11可见,当车体发生顺时针或逆时针旋转时,系统都能产生一个反方向的转矩。说明随着车体水平移动或旋转时,该系统会产生一个反向水平回复力或转矩,使得车体恢复到水平额定状态。证明本文的倾斜悬浮面高速磁浮方案,在车体水平及转动运动时能够实现被动导向,表明了本文方案的可行性。
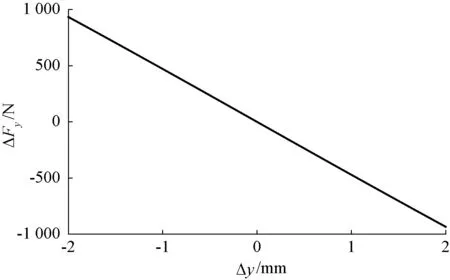
图10 水平导向力随水平位移的变化曲线
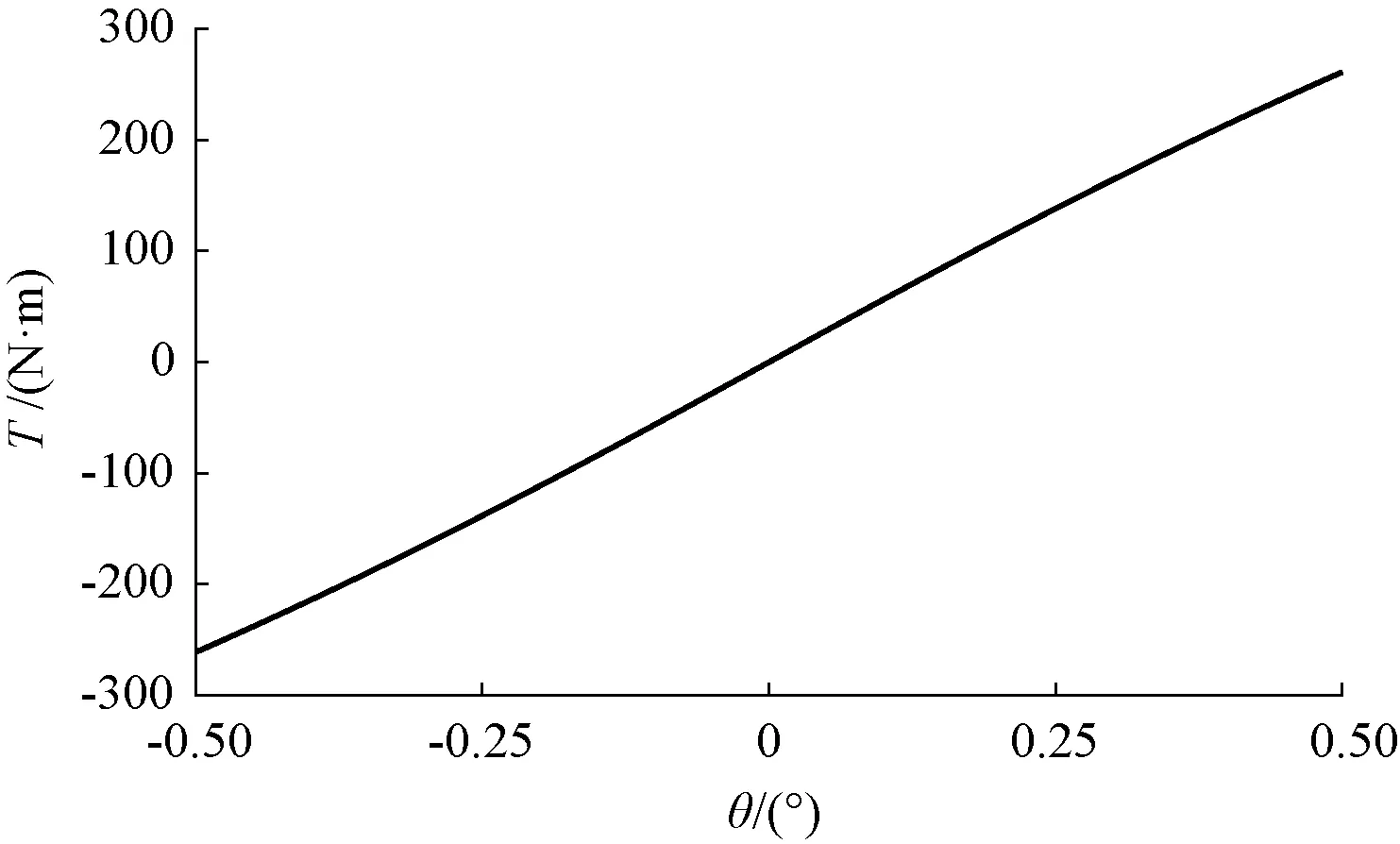
图11 系统转矩随旋转角度的变化曲线
4 系统参数对导向性能的影响
倾斜悬浮面高速磁浮方案相比于传统德国高速磁浮方案,最大区别在于将悬浮导向驱动集于一体,降低了系统复杂性的同时,电磁铁极面宽度可以得到增加,进而可增大驱动力。影响系统导向性能最为关键的因素是极面宽度及轨面倾斜角。
4.1 电磁铁极面宽度
当车体处于-2 mm、0、2 mm水平位移时,右侧线圈电流安匝数(左侧电流与右侧电流规律相同)及车体所受水平导向力ΔFy(ΔFy=Fyl-Fyr)随电磁铁极面宽度的变化曲线分别如图12及图13所示。从图12、图13中可以看出,水平导向力及线圈电流安匝数都随着极面宽度的增大而减小。因此,在一定导向能力要求的情况下,可适当增大电磁铁极面宽度以降低线圈电流。
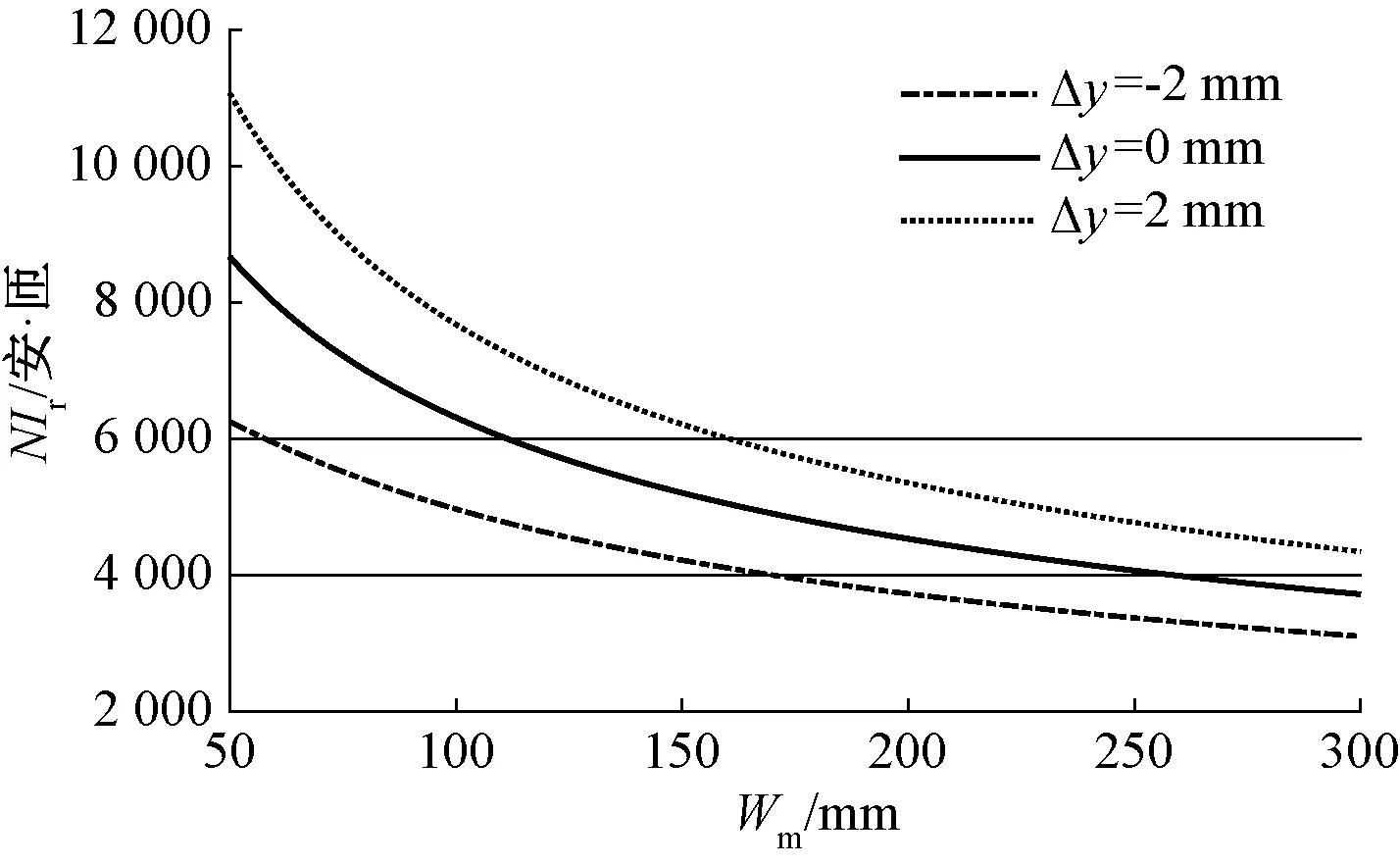
图12 线圈电流安匝数都随极面宽度的变化曲线
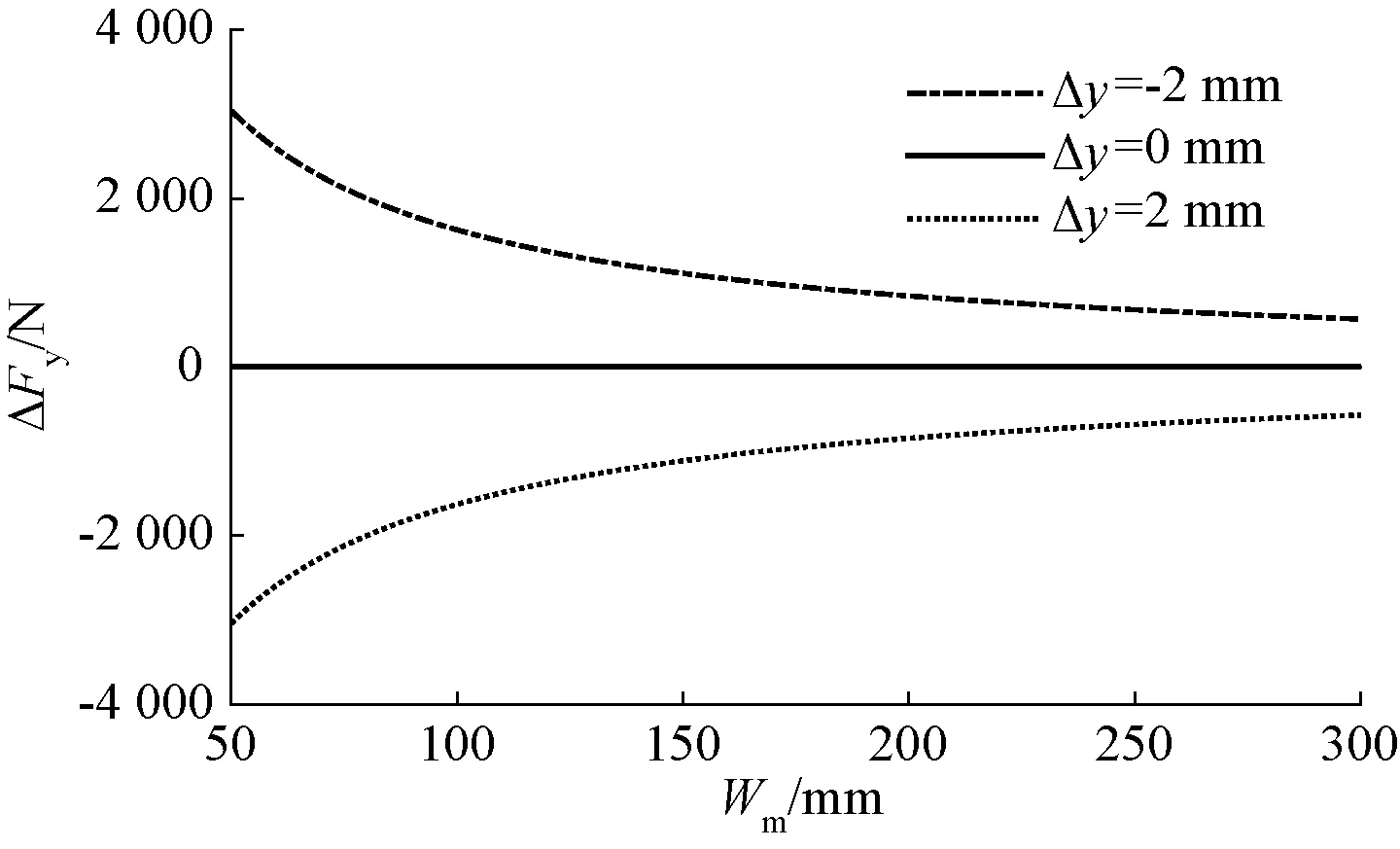
图13 水平导向力随极面宽度的变化曲线
4.2 轨道倾斜角
线圈电流安匝数及水平导向力随轨道倾斜角α的变化关系曲线分别如图14和图15所示。
图14 线圈电流安匝数随轨道倾斜角α的变化曲线
图15 水平导向力随轨道倾斜角α的变化曲线
由图14、图15可见,线圈电流安匝数和水平导向力都随着倾斜角的增加而增大。这是因为倾斜角增大时,垂向悬浮力在减小,需要更大的电流来抵消倾斜角增大对悬浮力的影响,保证系统垂向悬浮力等于车体重力。当车体处于2 mm位置,轨道倾斜角分别取35°、40°、45°时,水平导向力及线圈电流安匝数自身变化量之比分别为4.34倍及1.58倍。即,随着倾斜角的增大,水平导向力增大幅度比线圈电流安匝数增大幅度更大,且当倾斜角为45°时,水平导向力及线圈电流安匝数分别为934 N及5 654.5安·匝。因此,倾斜角的选取应综合考虑线圈载流能力及导向能力要求。
5 结 语
本文提出了一种集悬浮导向驱动于一体的倾斜悬浮面高速磁浮方案,相比于传统高速磁浮方案,控制系统更为简化,且可增大极面宽度以增大驱动力,可适用于更高速度工况。首先推导了该结构的电磁力解析解,建立了相应的有限元数值计算3D模型,验证了解析表达式的正确性,并分析得到该方案的被动导向特性。最后,分析了电磁铁极面宽度及轨道倾斜角对水平导向力及线圈电流的影响。
分析结果表明,本文的倾斜悬浮面高速磁浮方案在发生水平及旋转时可实现被动导向。增大电磁体极面宽度,可降低线圈载流,但会降低水平导向能力。随着轨道倾斜角的增大,线圈电流会相应增大以满足系统垂向悬浮力等于车体重力,同时水平导向能力会增加。在实际应用中,应结合水平导向能力、线圈载流能力及电机驱动力要求综合考虑电磁铁极面宽度及轨道倾斜角。本文研究了倾斜悬浮面高速磁浮方案的电磁力计算及系统静态被动导向特性,为下一步系统动态稳定性研究打下了坚实的基础。
猜你喜欢
重庆理工大学学报(自然科学)(2022年9期)2022-10-26
大电机技术(2022年3期)2022-08-06
防爆电机(2021年5期)2021-11-04
南方农机(2021年11期)2021-06-18
汽车与驾驶维修(维修版)(2019年4期)2019-09-10
物理通报(2019年7期)2019-06-29
科学家(2017年17期)2017-10-09
都市家教·上半月(2017年8期)2017-08-29
哈尔滨理工大学学报(2015年3期)2015-09-21
中学理科·综合版(2008年9期)2008-10-15
