基于智能网联汽车静态电流控制方法浅析
2022-02-14 07:36单新平覃华强彭承荣王国栋唐香蕉
汽车电器 2022年1期
单新平, 覃华强, 彭承荣, 王国栋, 唐香蕉
(上汽通用五菱汽车股份有限公司, 广西柳州 545007)
因市场对乘用车安全性、 舒适性和可靠性的要求提高,整车电气化和智能化配置不断丰富, 市场所需汽车提供的控制功能越来越多, 系统控制和通信的成本都非常大。 一辆车里可能同时存在6~8个操作系统, 一辆智能网联汽车中通常包含了70~100个子控制单元 (ECU), 其总量相当于空客A380里面所有控制单元的数量, 挂KL30的电控单元数量基本超20个, 可见汽车的复杂度已经可以跟航空设施相比较。 而这些ECU的开发通常由供应商按主机厂规范完成,且各子系统之间完全分离, 很难做到有效的资源共享和互操作, 往往由于各模块间标定、 兼容和调试验证不充分,导致整车出现静态电流超标概率增加。
1 系统简介及原理
现代乘用车一般由4~5个CAN通信网段组成, 车身控制域 (B-Can)、 信息娱乐域 (I-Can)、 动力底盘域 (PCan)、 智能驾驶域 (D-Can), 如图1所示。

图1 各控制域下模块分布情况
依据各功能模块需求差异, 一般挂常电涉及的静态电流模块有如下几种分类方式, 见表1。
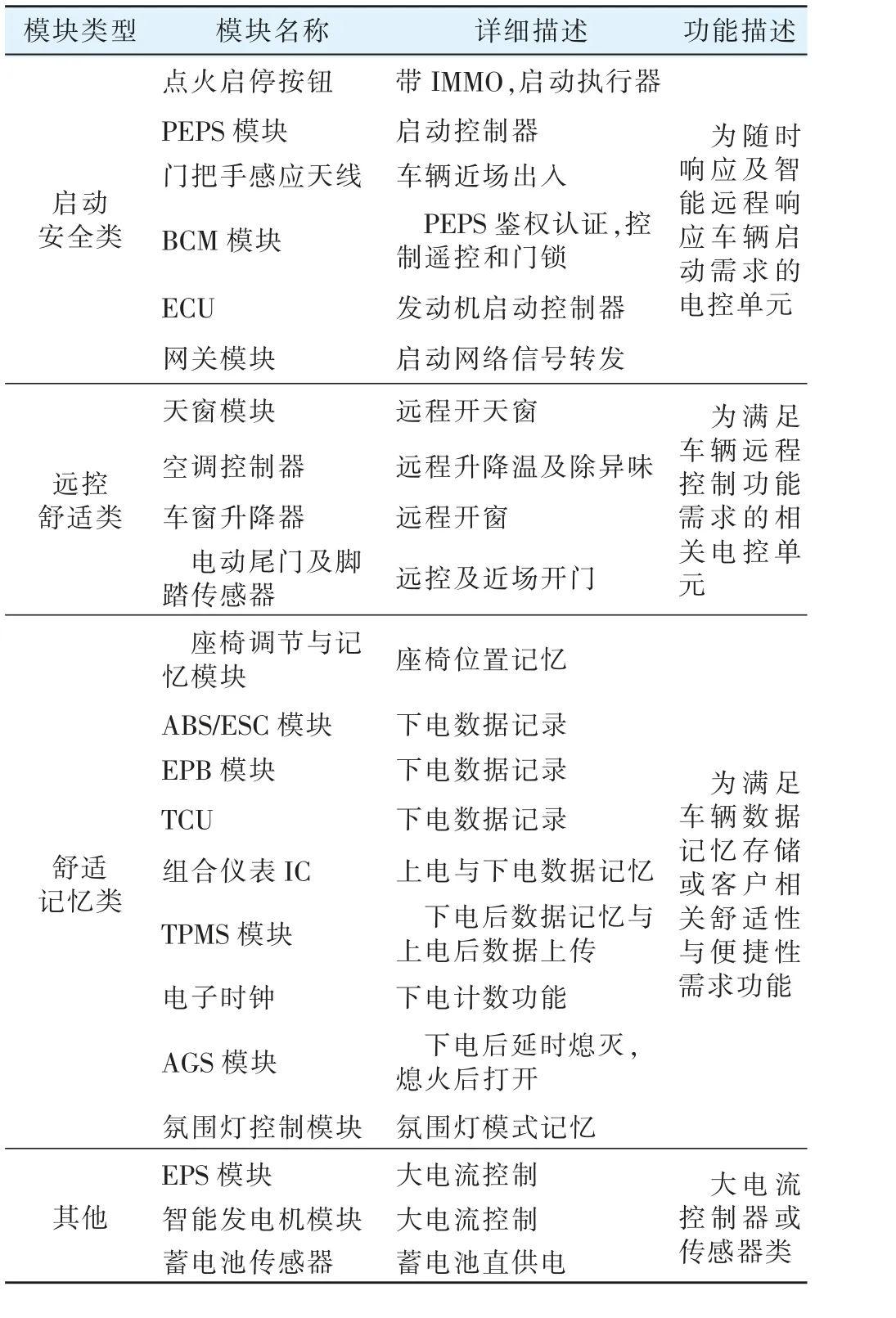
表1 各控制域下模块分布类型
整车钥匙下电一段时间后 (根据模块功能开发需求, 一般控制在10min以内), 整车网络报文停发后, 整车处于KL30电源模式下, 用电器在无网络或者物理硬件响应请求前提下, 进入浅度休眠模式, ECU 功耗降至低水平, 仅维持除唤醒源检测、 芯片记忆等相关回路, 其余电器功能全部停止工作, 一般整车静态电流降至20mA以下。
由于模块静态电流消耗和蓄电池自身电荷自放电两方面电量消耗, 当蓄电池所剩余电量不足以提供足够的启动电流CCA时, 发动机将不能顺利启动。
2 网联汽车静态电流控制方法
2.1 电源系统架构设计优化静态电流
在发动机工作状态, 整车用电主要由发电机供应, 同时为蓄电池补充电能, 静态电流电源管理系统主要需要考虑在发动机熄火后的电源管理, 挂常电执行器一般分配为正常KL30电源管理模式; 整车网络通信活动静止后, 用电器开始进入休眠倒计时 (一般架构功能设计阶段定义为10min以内), 仅为满足部分可供使用功能模块分配为休眠等待电源管理模式, 如延时开天窗和车窗, 发动机水温到预警值后电子扇延时开启等; 通过车机APP所实现远程唤醒、 网络唤醒、 钥匙唤醒或车上感应器物理唤醒的模块分配为浅休眠电源管理模式; 当监测到车辆超过7天未起动前提下, 整车电源将分配为深度休眠电源管理模式, 此时整车将不再响应网络或APP端、 云端所传输的远程控制功能(也包括远程启动功能), 为降低整车静态电流功耗, 只响应物理钥匙启动请求。
2.2 减少KL30节点数量和延时工作时间
传统各功能域下, 控制单元为分布矩阵式节点分布,运用先进星型网络架构减少网络直挂节点数量, 如将BCM作为车身域主控域DCU, 空调控制器等控制单元作为从属网络节点由接在BCM后控制电动窗电源取电, 这些控制器在整车下电后工作的主要原因是为了让顾客有更好的用户使用体验, 但均不需要维持很久的上电时间。 我们可以通过域内主控制器来控制继电器通断, 满足从属控制器的上电需求, 依托先进的电子电器架构体系, 如果各网络节点因为软件BUG所导致的亏电几率相等, 可指数级降低整车静态电流亏电风险。 如图2所示。

图2 分布矩阵式电子架构变革为 “星型” 网络
可延时工作部件的工作时间, 可适当锁定以减少静态电流消耗: 如下电后娱乐系统延时工作时间由越来的3min更改为1.5min。
2.3 降低车外网络与信号对整车异常休眠唤醒的影响
网联汽车通过手机收发相关车控指令, 通过移动通信网络, 网联通信云联动车机, 故而网联车机可能因车外网络与信号影响出现整车异常休眠唤醒情况, 进而导致静态电流超标甚至整车亏电, 可通过设置相关网络及信号监测与管理策略来弱化或消除这一类事件的影响。
蓝牙天线模块Ble为在整车休眠后具有一定功能的器件, 主要实现蓝牙钥匙解锁及启动车辆。 整车休眠后要一直处于polling状态, 蓝牙信号如果一直维持将消耗较多电流, 可通过控制策略进行分时策略及钝化控制polling周期来降低功耗, 当off下电后ble反复连接时, ble保持连接时间越来越短的控制策略8min->5min->2min, 累计连接时长改为15min, 超过15min后手机APP关闭后台自动扫描ble功能, 需要用户打开APP至前台后方可再次激活, 这样既可以降低模块静态电流功耗, 又可以保证功能的可用性, 避免客户抱怨; 网联车机可能在网络异常情况下出现静态电流超标, 根本原因为运营商网络状态的变化, 车机Modem基带芯片会发送事件至车机系统, 交互频繁下rild (数据传输模块) 处于持锁状态, 导致车机MPU休眠失败, 通过更改软件优化车机休眠时屏蔽Modem的事件通知。
2.4 通过域控制器设置“运输模式”降低车辆长时间运输电流消耗
对于车辆未售出前及中转过程需长途运输的车辆, 一般要求车辆下线超1个月仍可正常起动, 为了满足这一市场需求, 既往所采取的常规手段有加大蓄电池容量, 将非行驶状态非关联接常电控制模块设置在同一个开关或继电器下, 在运输过程中断开以减少静态电流消耗。 网联架构开发中可通过车身域主控制器开发电源管理模式为 “运输模式”, 可利用车辆自身相关按键和开关的组合操作方式进入, 在 “运输模式” 下主控域控制器MCU将禁用车辆上非启动且静态电流大的相关驱动 (主要为信息娱乐域与智能驾驶域内零部件), 同时通过CAN网络上传相关报文禁用相关网络, 使蓝牙通信模块bLe和网联车机模块及相关功能失效。
2.5 重新审视模块物理唤醒源存在必要性以减少电流消耗
电控模块从实现自身功能角度出发, 一般都希望尽可能多采集车上相关传感器信息用于功能逻辑判断和开发,但同时由于传感器采集信号的增加, 也增加了模块物理唤醒源异常唤醒的几率, 所以需要在兼顾静态电流设计的基础上重新评估物理唤醒源存在的必要性, 同时在满足可用性前提下尽可能实现功能逻辑优化, 图3是BCM门开休眠策略优化过程, BCM原休眠策略为门开即保持唤醒状态, 后经评审优化休眠策略为, 有门打开BCM唤醒和保持CAN网络3min, 3min后如门信号无变化则BCM休眠, 如果此时再打开侧门, 则进行3min重计时。

图3 BCM物理唤醒策略变更之门信号
2.6 依托网络与大数据分析等新技术应用智能管控静态电流
依托于现有大数据品质分析平台, 可以整理出实车出现亏电的经验阈值并结合实验室冷启动相关数据, 我们采用网联车机以车辆下电时刻作为标志时刻进行计时, 相应时段后既可以规避蓄电池自身因为前舱内温度等造成的虚电压提高蓄电池SOC的检测精确度, 又可在整车休眠后排除发电机充电电压的影响, 通过定时唤醒检测12V蓄电池SOC, 依托所检测出来的蓄电池SOC, 通过信息或短信下发预警客户关注蓄电池低电压风险; 对于新能源EV车型, 则相对传统车型可以开发更多新的补电功能, 可以通过高压动力电池通过启动DC/DC模块在车辆即使是停车状态进行自动补电, 故而新能源EV车型结合自动补电措施, 整车驻车天数可以相应减少。
2.7 创新电源管理系统架构
部分豪华车型, 现以采用全新双电池方案, 将启动电池单独布置专门用于车辆起动, 电池功能主要侧重于冷启动高瞬时电流需求对充电效率要求不高, 对极限使用温度要求高一般以铅酸蓄电池为主, 另一辅助电池主要用于车辆行驶及停放时的体验功能供电, 辅助电池主要侧重于电池容量和充电效率, 对极限使用温度要求低, 随着蓄电池技术的发展, 近年来钛酸蓄电池, 锂电池都有在现有车型项目进行尝试, 只是双电池方案成本成倍增加, 对价格敏感车型无法得到全面普及。
3 结束语
未来汽车电动化和智能化程度将越来越高, 给客户带来使用便捷性和科技感的同时, 车上所搭载的传感器和控制模块数量越来越多。 由于各子系统操作系统种类和数量的增加, 系统集成复杂度越来越高, 而各模块供应商开发相对独立, 亏电问题的出现将越来越频繁, 亏电问题的解决也将越来越严峻, 因而需要作为系统集成方的各主机厂以总览全局的高度系统性解决和控制静态电流问题。