
智能车轨迹跟踪控制方法研究
2022-02-15 06:48田圣哲贺艺斌窦胜月
汽车实用技术 2022年1期
田圣哲,贺艺斌,窦胜月
智能车轨迹跟踪控制方法研究
田圣哲,贺艺斌,窦胜月
(长安大学汽车学院,陕西 西安 710064)
随着信息化的发展,智能驾驶技术应用前景广阔。轨迹跟踪控制作为智能驾驶技术中的一环,受到越来越多的关注。文章介绍了智能汽车的运动学以及动力学模型,详细阐述了目前常用的几种跟踪控制方法的理论推导,分析了其各自的适用场景及优缺点。从而可知,无论哪一种控制方法都有其弊端,建模方法以及行驶速度的不同,都会影响控制效果。因此,需要结合实际情况进行改进,使智能汽车的控制更有适用性。
智能驾驶;跟踪控制;纯跟踪;模型预测
引言
智能驾驶研究的重点之一就是轨迹跟踪控制,国内外学者对此进行了深入的研究。本文介绍的轨迹跟踪控制方法有纯跟踪控制法、前轮反馈控制、MPC(模型预测控制)还有LQR(线性二次调节器)控制法。前面两者都是建立在汽车运动几何模型的一种控制,而后面两者可以在汽车动力学模型的基础上进行控制。不同的控制方法有不同的适用场景,例如纯跟踪和前轮反馈控制算法比较适用于中低速场景,有较好的跟踪效果。因此,掌握不同控制算法的特点,具有重要的意义[1]。
1 汽车运动学模型
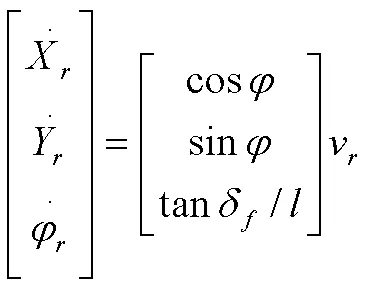
汽车运动学模型如下图所示,在大地坐标系下,(X,Y)和(X,Y)分别为车辆前后轴轴心坐标,为车体的航向角,δ为前轮转角,v和v代表前后轴中心速度。车辆的运动学模型为:
图1 汽车运动学模型
2 汽车动力学模型
汽车动力学模型就是从力学的角度来分析作用于目标自身的力和运动之间的关系,在描述动力学的过程中,我们尽可能简化,以减少控制算法的计算量。在此经简化后汽车具有三个方向的运动,分别为沿轴的纵向运动,沿轴的横向运动和绕轴横摆运动,即汽车三自由度动力学模型。可以建立下图所示的汽车单轨模型:
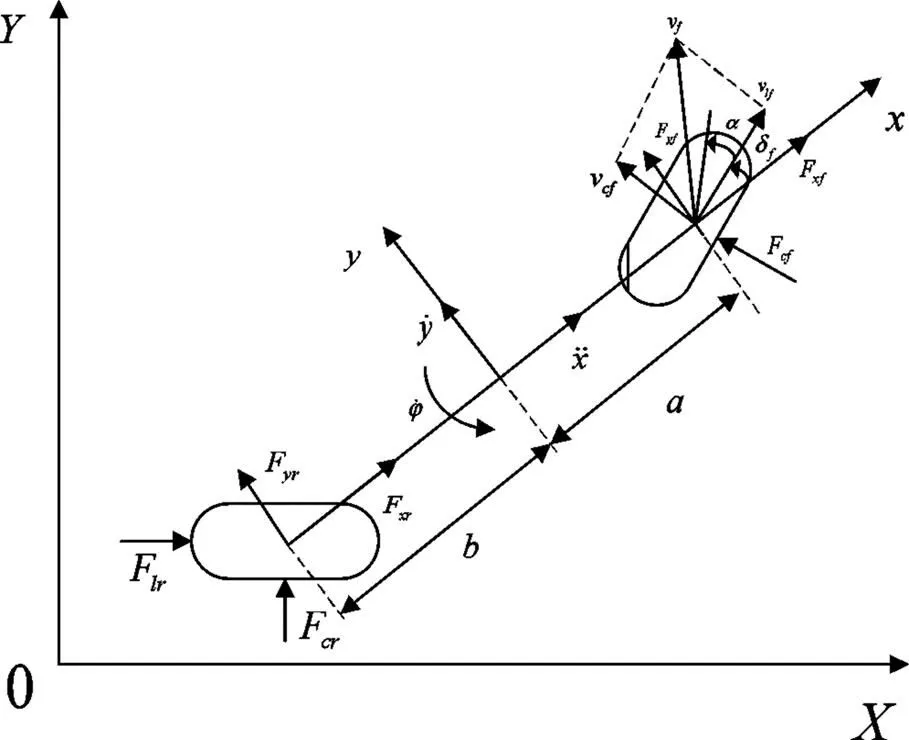
图2 汽车单轨动力学模型
根据牛顿第二定律,分别得到沿轴,轴和绕轴的受力平衡方程。
3 纯跟踪算法
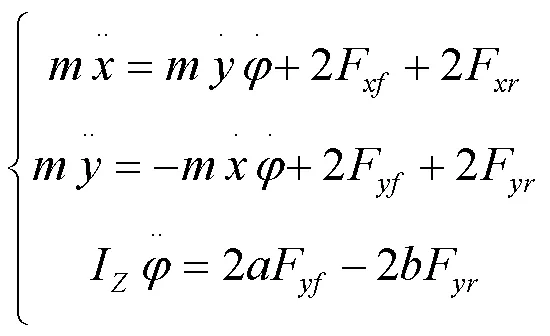
纯跟踪控制是根据车辆的几何模型来建立的,只有在低速下才能满足车辆的实时响应,不适合在高速工况来进行跟踪控制。该算法以车后轴为切点,在参考路径上匹配一个预瞄点,如下图点,假设车辆后轮中心点沿着一定的转弯半径行驶,然后根据三角几何关系来确定前轮转角的大小。
图3 纯跟踪几何模型
图中l表示车辆后轴位置到预瞄点的距离,表示车身姿态和目标路点的夹角,在△中,根据正弦定理有:
在阿克曼转向关系△中,
联立上式有:
此外,定义e为车辆当前状态和预瞄点在横向上的误差:
e=lsin(6)
联立(3)和(4),考虑小角度假设:
所以可看出纯跟踪控制器是一个横向转角控制器,受参数l响较大,通常l被认为是车速的关系,定义为关于速度的一次多项式。
4 前轮反馈控制
前轮反馈控制(Front wheel feedback)也称Stanley控制,其核心思想是利用前轮中心的路径跟踪偏差量对方向盘转向控制量进行计算[2]。Stanley算法是一种非线性控制算法,依据前轮中心控制点到参考轨迹目标点P2的侧向位移误差e和航向角误差e来进行设计的。该算法可以实现横向跟踪误差指数收敛于0。
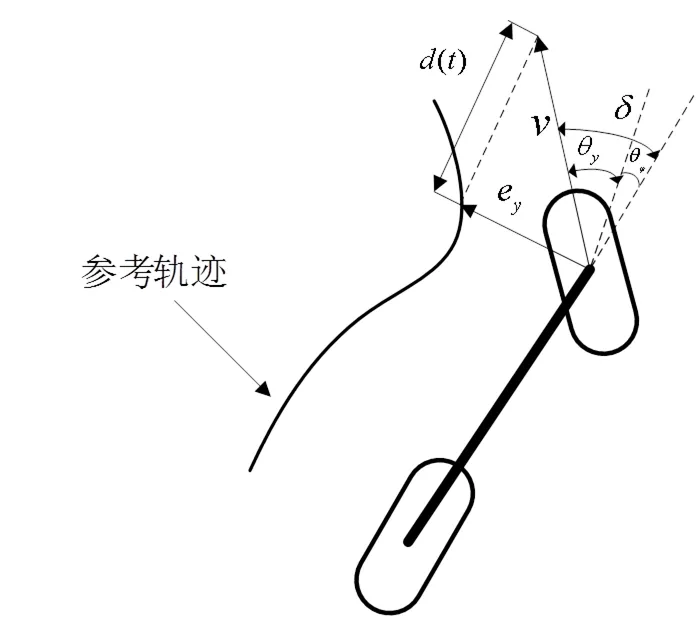
图4 stanley算法几何模型
如上图4所示,可以根据车辆的位姿与给定的参考轨迹的相对几何关系来获得车辆方向盘转角的控制变量。
不考虑横向跟踪误差情况下,前轮偏角应当与给定路径的切线方向一致。即有δ=θ,其中θ是车辆航向与最近路径线之间的夹角。
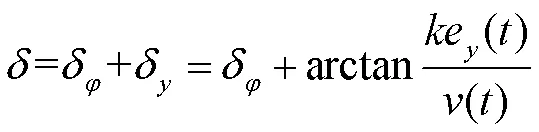
不考虑航向跟踪误差情况下,横向跟踪误差越大,前轮转向角越大。假设车辆预期轨迹在前轮处与给定路径上最近点相切线相交,由图中几何关系可得到如下非线性比例函数:

式中为车速,为增益系数,所以前轮转角为:
有文献表明,和纯跟踪算法相比较,stanley算法更适用于相对较高车速的工况,但道路曲线不光滑时容易出现车辆响应超调过大的问题。该算法不适用用于倒车的场景,自动泊车等不适用。
5 模型预测控制
模型预测控制(Model Predictive Control)是一种比较先进的过程控制方法。其处理多目标约束条件问题较强,成为智能驾驶领域研究问题的热点[3]。模型预测控制的实现依赖于过程的动态线性模型,既可以对当前时态进行优化,又考虑未来时刻,反复优化,考虑整个时域内的优化求解。
模型预测控制的实现主要有三个步骤,分别是预测模型、滚动优化和反馈矫正[4]。
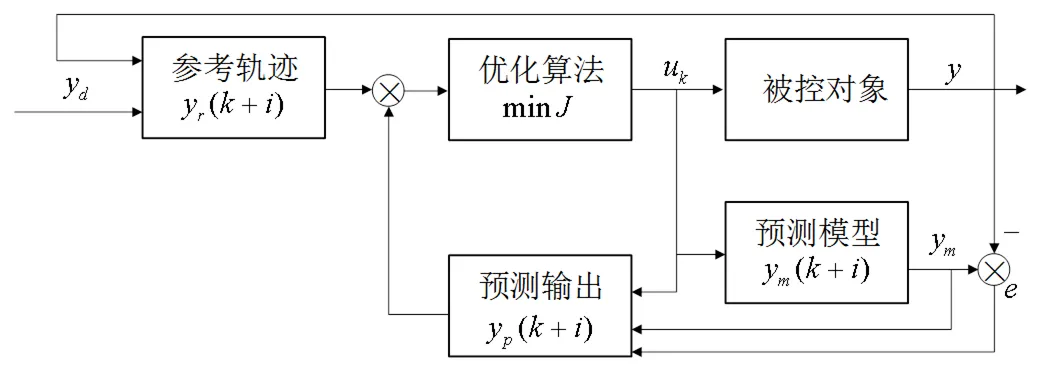
图5 模型预测控制算法原理示意图
(1)预测模型:预测模型作为模型预测控制的基础,可以用来描述系统的动态行为。预测模型的形式没有较高的要求,通常状态方程、传递函数都可以作为预测模型,对于无人驾驶汽车,预测模型一般是车辆动力学模型或者运动学模型。
(2)滚动优化:模型预测控制的滚动优化也叫在线优化,对系统的目标函数进行反复求解,这也是模型预测控制独有的特点。
(3)反馈校正:反馈校正也称误差校正。模型失配与环境不符等因素可能引起失控,需要计算出系统输出值和模型预估值来得到误差,从而通过反馈校正来进行修正,进行新的优化。
智能车的模型预测控制通常需要先进行运动学建模或者动力学建模,再加入自身的一些约束进行控制,从而提高目标车辆行驶的稳定性。车辆建模得到的是一个非线性模型,如果进行线性控制,还需要进行线性化,再进行离散化处理。
一般离散化的模型:

可以得到一个新的状态空间表达式:
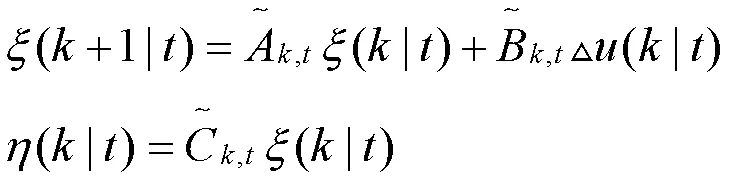
各矩阵的定义如下:
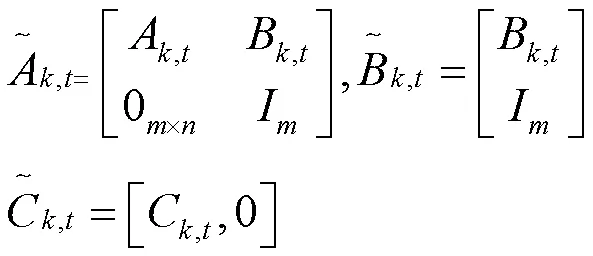
进一步简化,做如下假设:
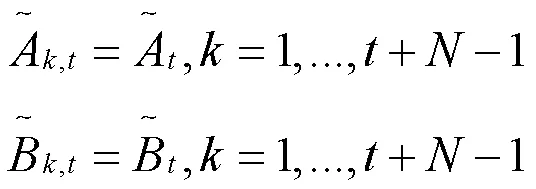
设定系统的预测时域为N,控制时域为N,预测时域内的状态量和系统输出量可用以下式子计算:
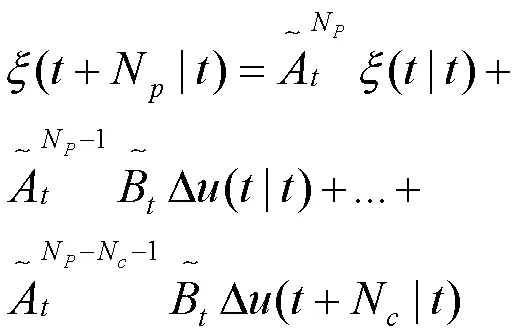
最终,系统输出矩阵为:

由上式可看出预测时域内的状态量和输出量都可以根据系统当前时刻的状态量和控制时域内的控制量来计算得到。
在实际中,需要设定合适的优化目标并进行求解,得到控制时域内控制序列。模型预测控制中再把优化目标函数经过处理转化为二次规划问题进行求解。在控制系统中,加入满足系统状态的量以及控制量的约束条件,这样就形成了一个完整的表达式。在反馈机制中,可以得到一系列控制增量,系统执行此控制量到下一时刻。新的时刻,系统根据状态信息不断更新来预测下一段时域输出。
模型预测控制模型建立相对方便,可以处理多变量,有约束的复杂问题,鲁棒性好。
模型预测控制现在被广泛的应用到轨迹规划中,考虑了车辆动力学和运动学特性,提高了跟踪控制的执行力。但是在实车测试中,车辆的约束维度较多时,会使得计算量偏大,尤其速度增加时,求解量增加,实时性较差。
6 LQR控制
LQR(线性二次调节器)控制是现代控制理论中最成熟的一种状态空间设计法。LQR控制算法可得到状态线性最优控制规律,使控制系统达到最优[5]。
线性二次型问题,都是对线性系统确定一个最优反馈控制率*()=-()使得下式性能指标最小:

其中为状态权重矩阵,为半正定矩阵,为控制量权重系数,为正定矩阵。在使用中,需要调节矩阵和矩阵来使控制效果最优。
为了求出,假设存在常量矩阵,在系统稳定条件下有:
= (+BPB)-1BPA(19)
矩阵同时满足黎卡提方程:
=+APA-APB(+BPB)-1BPA (20)
求解黎卡提方程得到矩阵,经过一系列的迭代求出符合要求的最优解。
在二自由度动力学模型中,LQR算法一般需要调节的参数更多,不仅要获得车辆自身的模型参数,还需要调节目标函数的,矩阵。在汽车不同的车速下,、的不同会对算法的效果有重要的影响,所以为了获得较优的跟踪性能,、的选取十分重要。但LQR控制的优点也比较突出,通过加上前馈转角,可以有效解决曲线行驶时的稳态跟踪误差,尤其在中等速度行驶时,跟踪效果更好。
7 结论
各种算法在使用场景上都有其局限性。纯跟踪算法是一种基于车辆运动学模型的控制方法,基于对前轮转角进行控制来消除横向误差,主要适用于低速工况。与纯跟踪算法相比较,Stanley算法考虑了横摆角误差,跟踪效果相对较佳。模型预测控制是现在应用最流行的控制算法,是自动驾驶轨迹跟踪领域的研究重点。MPC和LQR控制方法中系统建模、内部权重矩阵、仿真工况等的不同对最终结果都有影响。各种方法都有优缺点,在实际过程中,综合使用可能更有效果。
[1] 陈慧岩,陈舒平,龚建伟.智能汽车横向控制方法研究综述[J].兵工学报,2017,38(06):1203-1214.
[2] 熊璐,杨兴,卓桂荣,等.无人驾驶车辆的运动控制发展现状综述[J].机械工程学报,2020,56(10):127-143.
[3] 龚建伟,姜岩,徐威.无人驾驶车辆模型预测控制[M].北京:北京理工大学出版社,2014:35-50.
[4] 吴欣欣.基于模型预测控制的智能车辆轨迹跟踪控制方法研究[D].合肥:合肥工业大学,2020.
[5] 高琳琳,唐风敏,郭蓬,等.自动驾驶横向运动控制的改进LQR方法研究[J].机械科学与技术,2021,40(03):435-441.
Research on Tracking Control Method of Intelligent Vehicle
TIAN Shengzhe, HE Yibin, DOU Shengyue
( College of Automobile, Chang’an University, Shaanxi Xi’an 710064 )
With the development of informatization, the application prospect of intelligent driving techn- ology is broad. As a part of intelligent driving technology, trajectory tracking control has
more and more attention. This article introduces the kinematics and dynamics models of smart cars, elaborates the theoretical derivation of several commonly used tracking control methods, and analyzes their respec- tive applicable scenarios and advantages and disadvantages. It can be seen that no matter which control method has its drawbacks, the difference in modeling method and driving speed will affect the control effect. Therefore, it is necessary to make improvements in combination with the actual situation to make the control of smart cars more applicable.
Intelligent driving; Tracking control; Pure pursuit; Model prediction
A
1671-7988(2022)01-36-04
U495
A
1671-7988(2022)01-36-04
CLC NO.: U495
田圣哲,硕士研究生,就读于长安大学汽车学院,研究方向:自动驾驶轨迹规划及控制。
10.16638/j.cnki.1671-7988.2022.001.009
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
内燃机与配件(2022年2期)2022-01-17
福建中学数学(2021年1期)2021-02-28
小资CHIC!ELEGANCE(2021年44期)2021-01-11
小学生学习指导·爆笑校园(2019年6期)2019-09-10
新高考·高一物理(2016年11期)2017-07-07
课堂内外(小学版)(2017年3期)2017-04-15
新高考·高一物理(2016年1期)2016-03-05
红蜻蜓(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10
