基于SSD深度神经网络的航拍图像电力目标检测
2022-02-18 06:44石鑫化晨冰张凯王才建王士勇
数据采集与处理 2022年1期
石鑫,化晨冰,张凯,王才建,王士勇
(1.国网山东省电力公司,济南 250001;2.国网临沂供电公司,临沂 276000;3.山东师范大学信息科学与工程学院,济南 250358;4.山东联合电力产业发展有限公司,济南 250100)
引 言
农村配电网快速准确的设计以满足其负荷、结构以及线路铺设等调整与优化的要求,对进一步完善、架构更加合理的农村电网具有重要意义[1]。农村配电网规划与建设任务通常包括需求分析、实地勘测、配电网设计、配电网建设和配电网维护管理等步骤[2]。目前,配电网设计仍然以人工勘测和设计为主,工作量庞大,工作程序繁杂。配电网设计人员需预先对规划区域进行人工勘测,完成规划区域地物和地貌的人工记录,综合考虑配电网规划区域内的实际情况,采用AutoCAD软件进行手动设计得到配电网设计图纸[3]。当用电需求、设备情况或地面建筑等因素发生变化时,配电网设计图纸需要进行连续的手动修改与设计,大大增加了设计人员的工作负担。虽然有一些辅助勘测工具可用,但也存在高程数据不精确、GPS精确度不高、分辨率较低等缺点,采集得到的坐标误差在2 m以上,无法达到精准设计工作的要求。少量使用无人机辅助航测也仅仅只是作为眼和手脚的延伸,仍然需要专业人员对采集的航拍图像中的地物进行人工识别。
相比于常见目标,电力目标主要有以下3个特性。(1)电力目标成像背景复杂多样,且与背景相似度较高。例如,电力杆塔一般位于道路两侧,而电力杆塔的颜色与混凝土路面较为相似,使得380 V电力杆塔的检测较为困难。(2)不同电压等级的电力目标相似度较高。例如380 V电力杆塔与1 kV电力杆塔在形状、高度、横担及绝缘子方面都较为相似。另外,380 V电力杆塔与通信杆塔也具有较高的相似度。(3)同一电压等级可能采用不同种类的杆塔。受限于配电网技术条件,不同时期同一电压等级所采用的电力杆塔在外观与形状上具有较大差异。以上特性使得传统方法无法对航拍图像中的电力目标进行有效解译。
本文利用无人机航拍的方式获得配电网规划区域的高空间分辨率航拍图像,再对航拍图像中影响配电网设计的典型电力目标进行识别,将识别后的电力目标与其对配电网设计的影响因素相结合,为配电网设计自动筛选出可行区域,以方便后续的杆塔路径规划,为配电网设计的自动化与智能化奠定基础。无人机航拍图像中典型地物的分类与识别能够根据高分辨率无人机航拍图像中的地形地貌信息及已有电力设备信息,综合配电网区域的负荷及功能需求,对智能配电网设计方案的可靠性、安全性及合理性有较大的影响。根据配电网建设进度、成本及架构等约束,利用人工智能方法自动地从无人机航拍图像中规划得到配电网设计方案,从而降低人力成本。
1 基于深度神经网络的目标检测方法
近几年,随着以深度学习为代表的人工智能理论的发展,深度神经网络被不断应用于无人机航拍图像的目标检测任务中[4]。目前,应用较为广泛、检测精度较高的深度神经网络模型主要有:(1)基于区域的卷积神经网络(Region⁃based convolutional neural network,R⁃CNN)系列[5];(2)YOLO(You only look once)系列[6];(3)SSD(Single shot multibox detector)系列[7]。
Girshick等[5]在2013年提出了R⁃CNN模型。该模型首次将候选区域模型与深度神经网络进行结合,为基于深度神经网络的目标检测方法提供了良好的框架。但是,由于该模型必须采用固定尺寸的图像作为输入,对不同尺寸候选区域的调整会破坏潜在目标的特征属性,从而影响检测与识别精度。随后,Girshick等于2015年进一步提出了快速的基于区域的卷积神经网络(Fast R⁃CNN)[8]。该模型利用了空间金字塔网络(Spatial pyramid pooling networks,SPP⁃Net)模型中的金字塔池化思想[9],用最大池化层将特征图变成尺寸固定的特征图,再对其进行分类,确定目标的类别与位置。该模型还采用支撑向量机(Support vector machine,SVM)[10]对目标进行分类,进一步提高了目标检测与识别的精度,也降低了对硬件内存的需求。为了进一步提高目标检测与识别的实时性,Ren等[11]对上述模型进行改进,提出了更快速的基于区域的卷积神经网络模型(Faster R⁃CNN)。该模型在原有网络模型的基础上采用区域建议网络(Region proposal network,RPN)替代选择搜索策略,从而降低了网络模型的计算复杂度,提高了运算速度。
YOLO是Redmon等于2016年提出的目标检测模型[6]。该模型采用回归方法解决目标检测问题,其通过对图像进行一次检测直接得到目标的类别与边界框,避免了基于区域的卷积深度神经网络系列模型的两步操作,简化了目标检测流程,提高了目标检测效率。YOLO模型实现了45帧/s的检测速率,能够满足一定的实时性要求。随后,针对YOLO模型目标定位精度低的问题,Redmon等于2017年又提 出 了YOLOv2和YOLO9000模型[12]。YOLOv2模型引 入 了 批量归一化层(Batch normalization,BN),结合了Faster R⁃CNN中聚类的思想,使得该模型能够较好地对高分辨率进行图像建模。YO⁃LO9000则对目标分类与检测模型进行联合训练。Redmon等借鉴了残差网络结构模型,提出了YO⁃LOv3模型[13],使得网络层数加深、特征提取能力增强,有效提升了该模型对小目标的检测效果。近两年,Bochkovskiy等[14]又提出了YOLOv4,该模型将其在COCO数据集上的平均精度和帧率精度分别提高了10%和12%,取得了较大突破;随后提出的YOLOv5能够实现较快的推理[15]。
同时,SSD模型在目标检测与识别领域也受到了较高的关注[7]。SSD模型不采用候选区域选取与特征重采样操作,而是直接采用单个深度神经网络实现特征提取。该模型在低层特征图中对小目标进行检测与识别,而在高层特征图中对大目标进行检测与识别。Fu等[16]于2017年提出了DSSD模型,将残差网与SSD相结合,结合反卷积层实现小目标的有效检测。2017年,Jisoo等[17]则提出了RSSD(Rainbow SSD)模型。但是,该模型在一定程度上增加了计算复杂度,使得检测速度变慢。Li等于2017年提出了FSSD模型[18],充分融合了不同层级的特征图,有效地提升了目标检测精度。Yi等[19]于2019年将注意力模块引入SSD模型中,提出了ASSD模型,该模型能够通过注意力机制有效地消除无用信息的影响,从而提高目标检测精度。
2 基于SSD的航拍图像电力目标检测
鉴于SSD模型具有较高的目标检测精度,本文采用SSD模型对无人机航拍图像中的典型电力目标进行检测。SSD采用VGG16模型作为主干网络,对其进行了一定的完善与修改。SSD中的主干网络结构去除了VGG16模型中的Dorpout层与FC8层,将FC6与FC7作为卷积层,增加了4个卷积层作为补充,具体网络结构如图1所示,其中Conv为卷积操作。SSD模型输入固定尺寸的图像,将不同层级的特征图进行综合,对预先默认的边界框计算其类别及置信度,最终通过非极大值抑制获得目标检测结果。
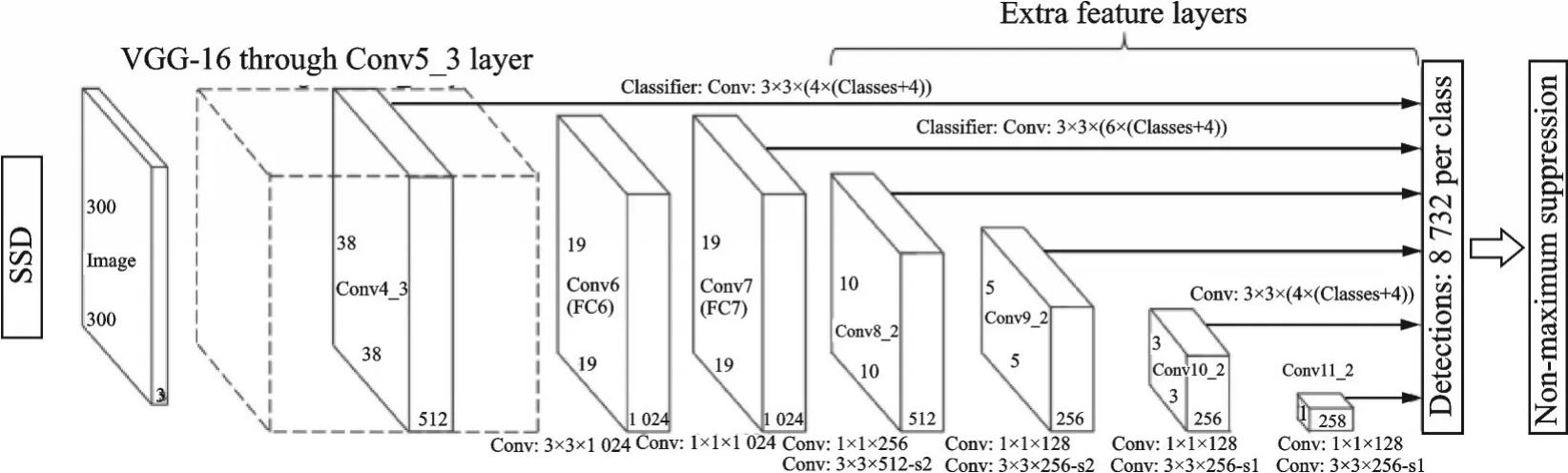
图1 SSD模型网络结构Fig.1 Network structure of SSD
VGG网络由牛津大学的视觉几何研究实验室与谷歌的DeepMind共同提出。VGG网络结构简洁,使用同样尺寸的滤波器与池化操作。随着VGG网络的不断加深,其特征学习能力不断提高,而且已经在大量图像处理应用中取得了成功。SSD网络模型中采用的VGG网络结构如图2所示。与AlexNet相比,VGG网络具有较强的泛化能力与较好的性能[20]。

图2 VGG16网络结构图Fig.2 Network structure of VGG16
为实现电力目标的有效检测,该网络模型采用的目标函数为

式中:N为目标框数目;c为目标类别索引;x为指示函数,表示默认边界框与真实边界框是否匹配;l和g分别表示预测边界框与真实边界框;定位损失Lloc采用光滑的L1函数计算l和g之间的损失;置信度损失Lconf通过softmax计算;α为权重参数。定位损失Lloc和置信度损失Lconf的具体定义为

为了便于快速定位目标,预先设定默认边界框实现目标的特征学习。每个特征图的默认边界框尺度为

式中smin和smax分别设为0.2和0.9。通过结合特征图中不同尺度的特征,能够实现目标特征的高效提取,进而实现目标检测。
3 电力目标数据集构建
3.1 航拍数据采集
本文采用SSD模型对无人机航拍图像中的典型电力目标进行检测与识别。主要研究区域为山东省临沂市的幸福岭村(0.2 km2)、北于村(0.6 km2)、新桥镇(1.1 km2)及李官镇(1.5 km2)。研究区域如图3所示,面积为3.4 km2,覆盖了临沂市部分典型地形地貌。本文采用无人机对研究区域进行重叠的拍摄。无人机采用的拍摄相机型号为FC6310,飞行高度约为214 m,空间分辨率约为4 cm。航拍图像大小为3 648像素×5 472像素。
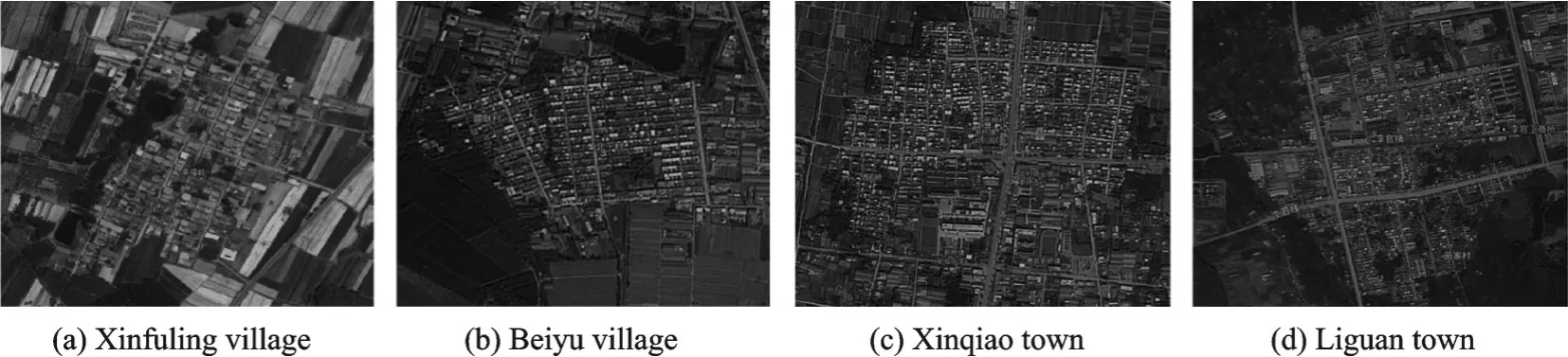
图3 本文研究区域Fig.3 Research areas in this paper
3.2 数据标注与处理
无人机在上述研究区域共拍摄航拍图像2 780幅。由于SSD网络模型无法实现较大图像的目标检测,因此本文首先将上述图像裁剪为608像素×608像素。每幅图像能够被不重叠地分成54幅尺寸为608像素×608像素的图像。将所有航拍图像进行裁剪,最终得到150 120幅图像。本文采用人工标记的方式对典型电力目标检测的位置与类别进行标注(部分标注数据可在百度云盘下载,网址:https://pan.baidu.com/s/1⁃kSk49XLuglqBik86V01zg,提取码为k7rb)。该数据集中标注的典型电力目标及影响电力线路设计的目标包括11类,共32 118个目标。不同电力目标数量差异较大,为典型的不平衡数据,最终标记结果如表1所示。表1还给出了不同电力目标在输电线路中的设计规范。不同的电力目标设计标准不同,对配电网设计的影响也不同。因此,在进行配电网智能化设计中,需将各类电力目标及影响配电网设计的目标进行全面识别,从而提升配电网设计的稳定性与合理性。
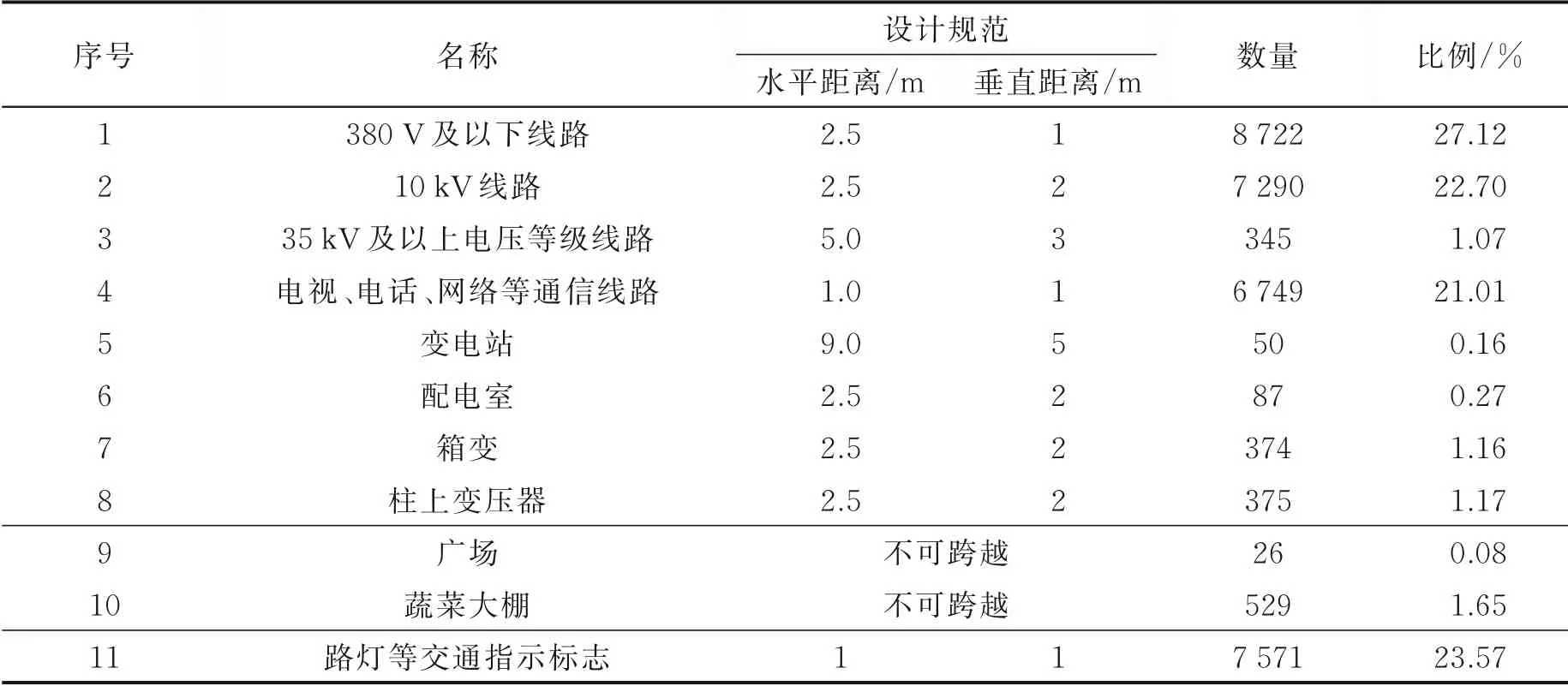
表1 典型电力目标标注情况Table 1 Annotation information about classical power targets
4 实验结果与分析
4.1 网络模型设置
本文采用SSD模型对上述电力目标进行检测。首先将80%的标记数据作为训练数据,剩余20%标记数据作为测试数据。训练与测试在PyTorch环境中进行;服务器配置为NVIDIA 2080Ti GPU,显卡内存为12 GB;参数epoch为200 000,batch⁃size为32,学习率为0.000 01。训练完成时,最终的回归损失与类别损失分别为0.624和1.645。本文还采用Faster⁃RCNN模型及YOLO模型作为对比方法,基于相同的训练与测试数据对典型电力目标数据集进行全面的检测与对比。
4.2 实验结果分析
通过上述训练,本文在20%的标记数据上进行了测试,测试结果如表2所示。结果表明:本文采用的深度神经网络模型在变电站、配电室、箱变及柱上变压器等特征较为明显的目标上检测效果较好。而目标类型1与目标类型4表观相似度较高,使得该网络模型检测准确率较低。另外,由于不平衡数据的影响,本文采用的目标检测模型在广场、蔬菜大棚等目标上表现较差,其主要原因在于这2类目标在所构建数据集中数量较少,从而影响其检测精度。Faster⁃RCNN的目标检测模型在大部分目标上的检测准确率低于SSD目标检测模型,但是在变电站目标上的准确率较高。YOLO模型的目标检测准确率整体低于SSD模型,但是在变电站及柱上变压器目标上的检测准确率优于本文采用的SSD模型。相比于Faster⁃RCNN和YOLO目标检测模型,本文采用的模型的平均准确率更高。表2还比较了不同检测模型在该数据上的召回率指标,结果表明,SSD模型在该数据集上的整体表现优于其他模型。
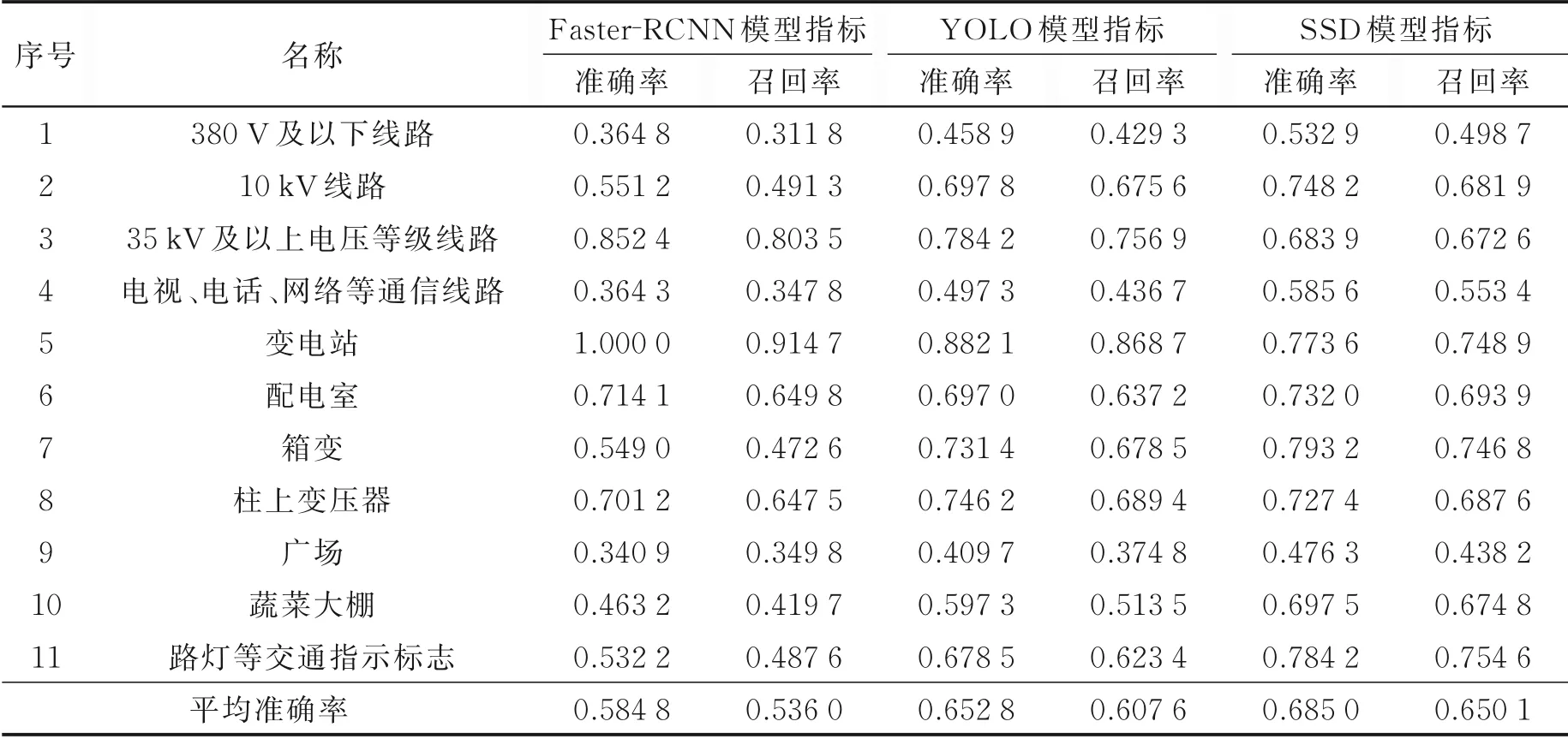
表2 电力目标检测数值指标Table 2 Numerical values of power target detection
图4列举了SSD、YOLO和Faster⁃RCNN模型的部分电力目标检测结果。从图4结果可看出:SSD方法与Faster⁃RCNN方法采用的目标检测模型均能够较为完整地检测出目标,且检测出的目标置信度较高。另外,图4中部分目标相距较近,对目标检测有一定影响。例如,图4中的交通标志目标与电力线路目标距离较近,使得检测获取的边界框有一定的重叠。对比结果表明:3种方法均能得到较为精确的边界框,但Faster⁃RCNN模型在相距较近的目标上存在漏检现象;YOLO模型对于路灯等交通标志检测效果较差;而本文检测模型能够较好地检测出相距较近的目标。

图4 3种不同方法的部分目标检测结果Fig.4 Partial results of different three methods
本文进一步分析了SSD模型在不同训练数据量下的准确率。该实验分别采用70%,80%和90%的训练数据对SSD模型进行训练。表3记录了不同训练数据量下的目标检测准确率,结果表明:训练数据增加目标检测平均准确率会增加,但是对于柱上变压器和广场等部分目标的检测准确率却有所下降。一方面是由于数据过拟合可能导致训练模型在柱上变压器和广场等目标上的检测准确率下降;另一方面,柱上变压器空间尺寸较小,而广场目标空间尺寸较大,较大的空间尺寸差异导致训练模型无法同时有效兼顾较小尺寸与较大尺寸目标,从而使其检测准确率下降。随着训练数据量减少,SSD模型的平均目标检测准确率低于80%训练数据得到的模型准确率,但在第1类和第2类目标上表现较好。而70%与90%训练数据得到的训练模型在柱上变压器、广场目标类别上表现较差。在电力线路设计任务中,柱上变压器、广场等目标对线路规划影响较大。相比于柱上变压器、广场目标上的准确率差异,70%、80%和90%训练数据得到的模型在前4类目标检测准确率上差异较小。因此,考虑到SSD模型的整体性能,本文最终采用80%的标注数据进行模型训练。另外,表4记录了SSD模型在不同比例测试数据上的检测结果。从表4可以看出,在不同比例测试数据上的目标检测准确率差异较小。
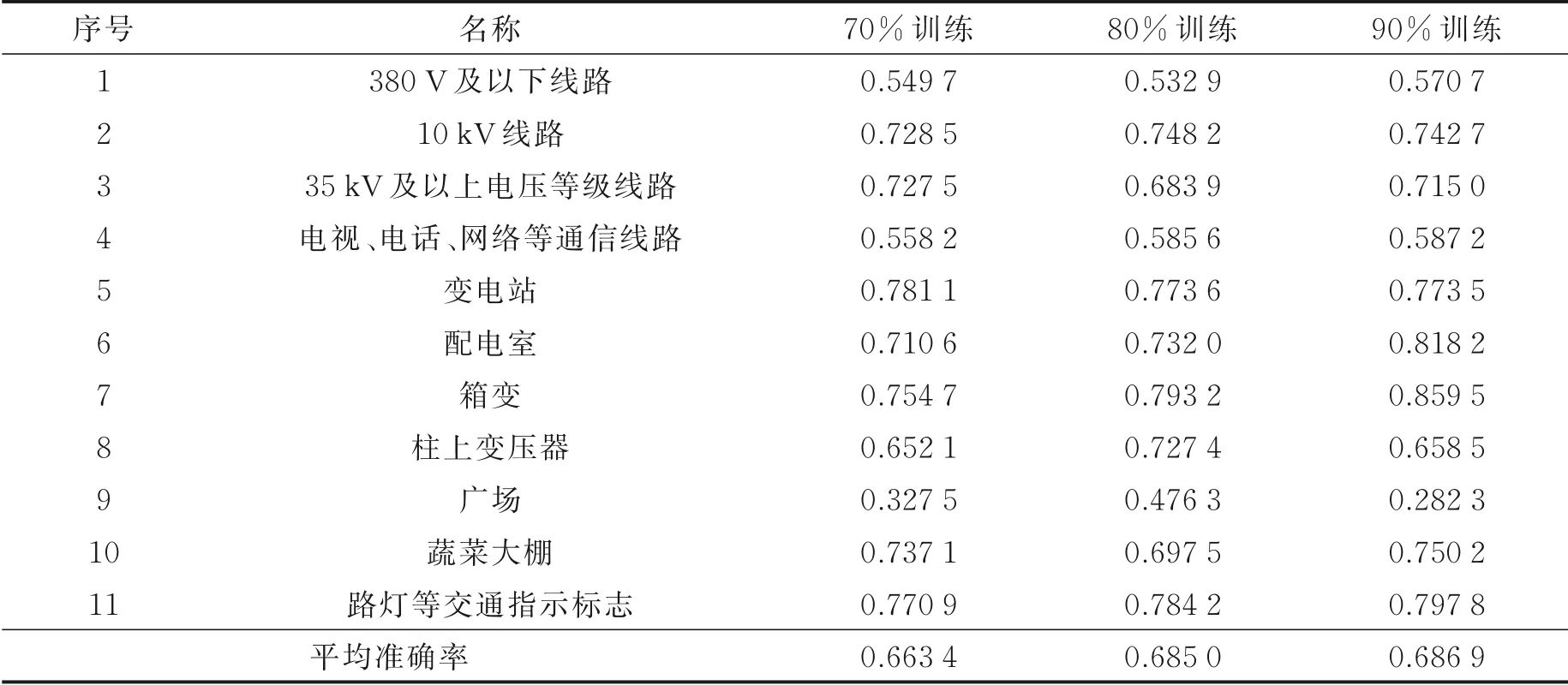
表3 不同训练数据量下的目标检测准确率Table 3 Target detection accuracy with different training data
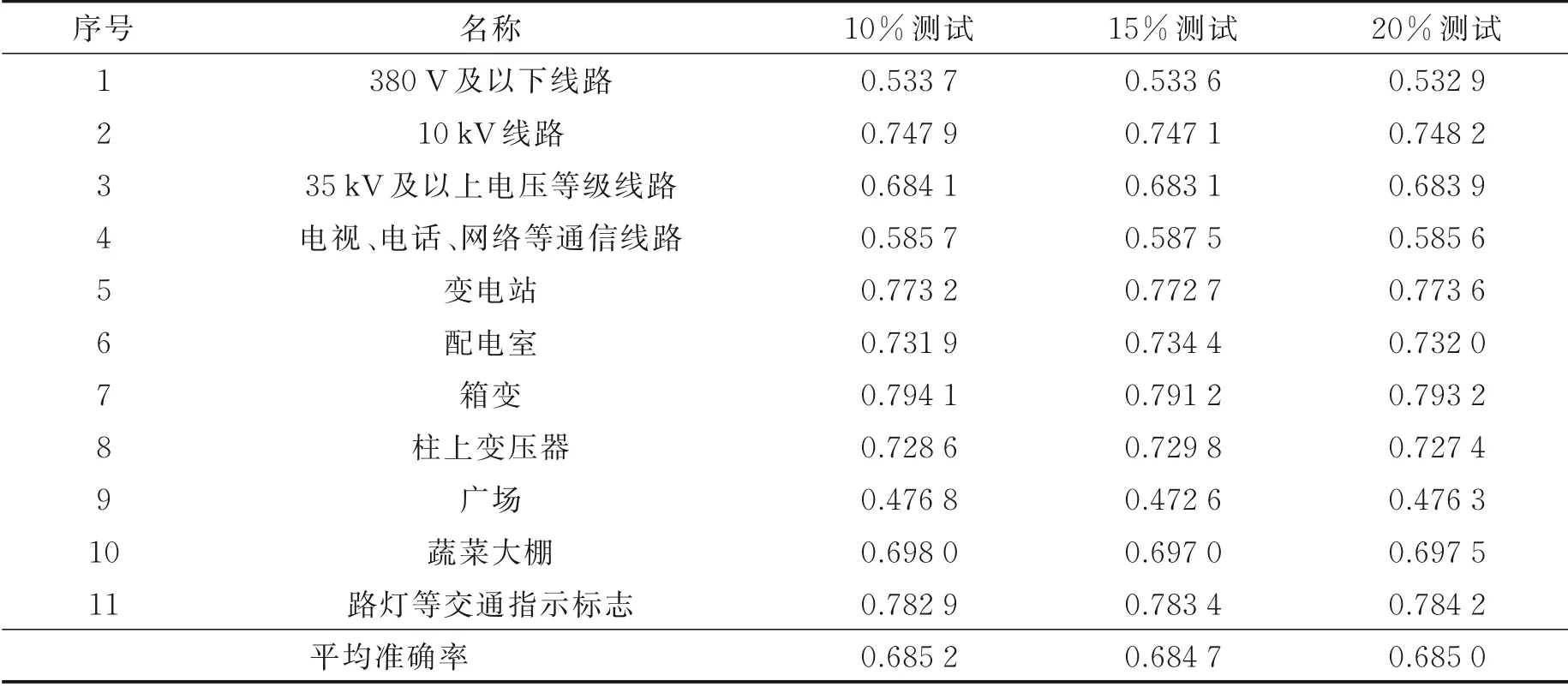
表4 不同比例测试数据量下SSD模型的检测准确率Table 4 Target detection accuracy of SSD with different test data
4.3 结合设计规范的可行区域划分
为明确典型电力目标在配电网智能化设计任务中的作用及意义,图5展示了真实场景中电力目标对配电网设计的影响,结合设计规范,给出了最终的配电网可行区域。图5(a)为原始图像;图5(b)中红色框标出的目标为380 V及以下线路,橙色框标出的目标为10 kV线路;图5(c)中绿色为建筑物,蓝色为农田,黄色为树木。通过将电力目标检测结果与设计规范相结合,确定电力目标周围区域为不可行区域,结合地物分类结果,确定房屋、农田及树木等地物为不可行区域,最终得到可行区域,即为图5(c)中的未标注区域。图5表明电力目标检测能够为电力设计领域提供技术支持,降低配电网设计的人工成本,提高配电网设计的效率。

图5 电力目标对可行区域的影响Fig.5 Influences of power target on the feasible regions
5 结束语
研究了基于SSD深度神经网络模型的航拍图像典型电力目标的检测与识别。采用无人机对山东省临沂市部分地区进行航拍,完成了典型电力目标的手工标注。采用SSD模型对航拍区域的典型电力目标进行检测与识别,11类典型电力目标的平均识别准确率为68.5%。实验结果表明,SSD模型能够对部分电力目标进行有效的检测与识别,达到了实用的要求。在临沂供电公司各县公司的现场应用表明,配电网线路规划人员需要一周完成的手工设计任务,使用本文方法3天就能够完成线路规划与设计,缩短了设计周期,避免了当前由人工勘测或无人机航测后的人工识图所导致的勘测信息遗漏风险,为勘测质量和精准性的进一步提高提供了有效的技术保障。然而,本文构建的电力目标数据集为典型的不平衡数据集,受实际情况限制,变压器、配电室等电力目标数量有限,后续工作将通过数据的补充解决该数据集中存在的不平衡性,从而进一步提升目标检测性能。同时,由于380 V及以下线路和电视、电话、网络等通信线路相似度较高,检测效果较差。本文将继续对相似度较高的电力目标进行研究,提出更加有效的识别算法,解决上述问题。
猜你喜欢
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
健康体检与管理(2021年10期)2021-01-03
时代邮刊·下半月(2020年9期)2020-09-23
电子制作(2019年16期)2019-09-27
活力(2019年22期)2019-03-16
金桥(2018年6期)2018-09-22
电子制作(2018年8期)2018-06-26
小学生优秀作文(低年级)(2018年6期)2018-05-19