基于BP神经网络的相控阵雷达多目标跟踪时间资源优化分配方法
2022-02-18 06:44陶庆张劲东陶庭宝邱旦峰
数据采集与处理 2022年1期
陶庆,张劲东,陶庭宝,邱旦峰
(南京航空航天大学电子信息工程学院,南京 211106)
引 言
相控阵雷达因其特有的电子转向阵列天线,具有灵活的波束调转能力,并可以根据任务要求快速调整波束指向和停留时间,此功能使得相控阵雷达能够快速自适应的定位目标并调整停留时间[1]。对于不同应用背景的多目标跟踪任务,如何合理地分配波束在目标上的驻留时间,使得相控阵雷达对目标的跟踪性能维持在最佳状态,成为了充分发挥相控阵雷达优势的关键。
到目前为止,在目标跟踪中已经有一些雷达资源最优分配方面的优秀研究。对于限定系统性能条件下最小化雷达资源使用量的研究,文献[2]采用单波束分时对多个目标进行照射并跟踪,通过调整波束宽度同时照射方位角接近的目标,大幅提高照射每个目标的驻留时间,在提高跟踪精度的同时有效地节约了雷达用于跟踪的时间资源;文献[3]提出了先解决波束的分配问题再考虑波束驻留时间的两步分解算法。这样可以在获得较高的资源利用率的同时,还能保证各目标的跟踪性能。对于有限的资源条件下最优化资源使用量的研究,文献[4⁃6]采用基于信息论的多目标跟踪资源分配方法,通过计算每个目标的信息增量,在一定的时间资源下使得跟踪精度达到最高。上述研究具有一个共同缺点,即无法自适应地根据所跟踪目标与环境的特性做出最优策略调整。实际上,在雷达观测下的目标并不是同等对待的,需要对威胁度高的目标分配更多的资源进行精密跟踪,而对于威胁度低的目标只需要粗跟踪来维持航迹即可。针对该问题,文献[7⁃8]采用协方差控制的雷达资源管理方法,对不同目标采用不同的跟踪误差协方差水平,保证系统资源不被浪费,但是其对于机动目标性能较差。
随着机器学习不断地发展完善,相关的理论和研究成果不断涌现。目前还没有运用机器学习做雷达资源管理的相关研究,而与机器学习相结合的目标跟踪研究已初见成效。文献[9]使用神经网络对船舶路径跟踪误差进行逼近,通过路径跟踪误差历史数据来预测之后的路径跟踪误差,使得船舶路径跟踪误差估计的效率更高。文献[10]针对卡尔曼滤波中新息残差的理论值与实际值不一致导致跟踪精度下降问题,利用支持向量机回归算法预测目标下一个方位并不断减小误差,实现目标的快速跟踪。
本文基于上述研究工作,将相控阵雷达多目标跟踪环境中的所有目标按照一定的威胁度分为有威胁和无威胁两类,针对不同类别的目标选择不同的资源分配方式。对于能对我方产生威胁的目标,例如不断向我方逼近的目标,该类目标要以高跟踪精度为目的对其进行资源分配;而为对我方没有威胁的目标,例如己方目标或不断远离我方的目标,只需满足一定的跟踪精度来维持航迹,以节省跟踪时间为目的对其进行资源分配。在此基础上,以目标位置估计的贝叶斯克拉美罗下界(Bayesian Cramer⁃Rao lower bound,BCRLB)作为分配准则,建立了多目标跟踪资源分配模型,并采用遗传算法对其求解。针对模型的非线性性质导致求解过程消耗大量时间的问题,进一步提出采用反向传播(Back propagation,BP)神经网络算法来代替求解过程,将前面复杂的求解过程转换成了网络模型拟合问题。仿真结果证明了本文方法在保证了所有目标的跟踪维持在最佳状态的同时,极大地缩短了计算所消耗的时间。
1 系统模型
1.1 信噪比模型
假设雷达的发射功率为Pt,根据雷达方程,可得到接收的回波功率为

式中,Gt,Gr为雷达发射与接收天线增益,λ为雷达所用波长,σ为目标的雷达散射截面积(Radad cross sec⁃tion,RCS),R为目标与雷达间距离。设在第i个目标在第k个采样间隔中波位驻留在目标上的时间为T ik,发射信号的脉冲重复周期为Tpri,则相参积累的脉冲数为由此得到脉冲回波信噪比为

式中,k0为玻尔兹曼常数,B为发射信号的带宽,FN为雷达接收机噪声系数,T0为标准室温。可以看出,除了驻留时间,其他参数都是已知的确定值,回波信噪比是以驻留时间为唯一变量的函数。
1.2 运动模型
为了证明本文方法同样适用于机动目标的跟踪,所以将匀速直线运动CV,圆周运动CT,匀加速运动CA,作为目标的运动方式。它们具有相同的状态转移方程[11]

式中:Xk为目标在第k个采样间隔T时的状态向量,F为状态转移矩阵,Wk-1为过程噪声,其是均值为零,协方差为Qk-1的高斯白噪声。不同的运动模型下的状态向量、状态转移矩阵和过程噪声是不同的,以下给出它们的表达式。
(1)CV模型

(2)CT模型

(3)CA模型

式中:I2为二阶单位矩阵,“⊗”表示笛卡尔积,式(4~6)中出现的参数与其表示的意义如表1所示。
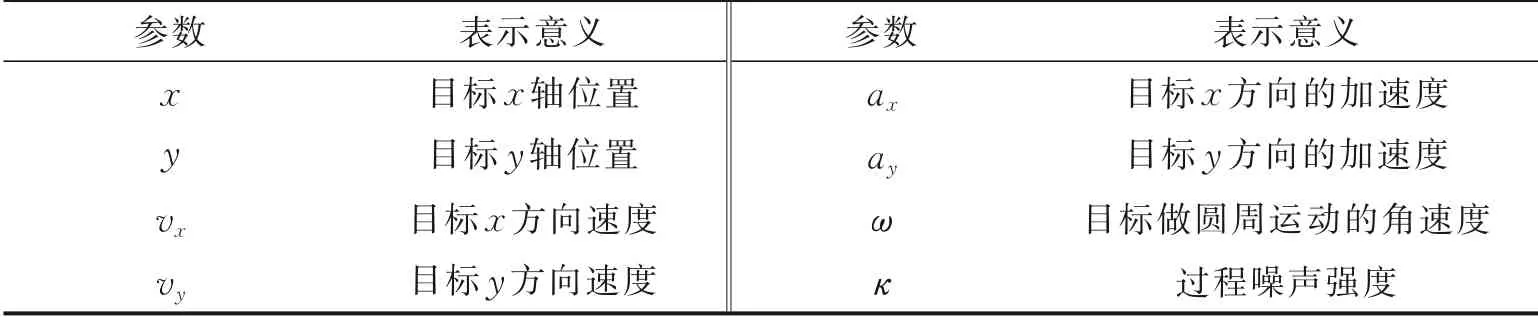
表1 式(4~6)状态方程中包含的参数及表示意义Table 1 Parameters and representations included in Eqs.(4—6)
1.3 量测模型
在本文中,测量目标的距离和方位角,假设雷达在第k个采样间隔照射第i个目标,则目标i的量测方程可以表示为

式中

式中:和为目标i相对于雷达的距离和方位角,(x0,y0)为雷达所在位置。式(7)中∝CN(0,)表示量测噪声,其为零均值高斯分布且具有协方差

式中:和分别为目标距离和方位角估计均方差的克拉美罗界[12]

式中:c为光速,β和λ分别为回波信号的带宽和波长,γ为天线孔径,由式(10)可以看出量测噪声的协方差与有关。
1.4 贝叶斯费舍尔信息矩阵
BCRLB包含了目标运动状态和驻留时间等一系列变量,同时为这些变量参数估计的均方误差(Mean square error,MSE)提供了一个下限,所以本文将它作为评估目标跟踪精度的标准。假设目标估计的状态为,它是量测方程的函数,则目标状态估计的MSE可表示为

式中J()为目标状态的贝叶斯信息矩阵(Bayesian information matrix,BIM),它可以表示为[13]

式中JS()为目标先验Fisher信息矩阵(Fisher information matrix,FIM),它取决于目标的状态,可表示为

JD()表示数据的FIM,其表达式为

将式(13,14)代入式(12),可得

根据式(9,10)可知是关于的函数,因此J()也是关于的函数。
1.5 互信息(Mutual information,MI)准则
除了BCRLB,雷达回波和路径增益矩阵之间的MI亦可作为目标跟踪性能的量化指标。若发射信号S已知,即发射脉冲波形s已知,接收信号Y与路径增益矩阵H间的MI可计算为

式中:h(*)为随机变量的微分熵。要计算I(Y;H|S),需要计算h(Y|S)和h(W)。已知发射信号S条件下的接收信号Y的概率密度函数为

式中:yτ为雷达回波信号,sτ为l×1的向量,表示发射脉冲采样,l为采样长度,其中

式中表示随机变量hτ的方差,由式(17,18)可得条件微分熵h(Y|S)计算如下

进而有

式中为环境噪声强度,将式(19,20)代入式(16)中可得到

式中:MI表示互信息量I(Y;H|S)。
2 基于威胁度的多目标时间资源分配优化算法
2.1 基于BCRLB的分配准则
BCRLB不仅为离散时间系统的无偏估计提供了MSE的下界,而且还常用于判断估计的有效性,因此可以将它作为衡量目标跟踪有效性以及时间分配的指标,本文以目标距离估计的BCRLB作为时间分配的标准,计算得到

式中表示目标距离估计的BCRLB,目标状态估计的BCRLB矩阵表达式为

从式(15~17)中可以看出也是关于时间变量的方程。
2.2 多目标跟踪驻留时间最优分配算法
对于多目标的跟踪,以同一个标准来对所有的目标进行资源分配是不合理的。如不断远离雷达的目标,这类目标对我方没有威胁,对其进行长时间照射获取高精度的跟踪没有意义,浪费雷达的资源。为了有效地控制环境和所跟踪的目标,将需要跟踪的目标以威胁度V为标准划分为两类,其中V可由目标的速度与距离共同决定。目标与雷达距离越近,相对雷达径向速度越大,其威胁度越大,反之威胁度就越小。因此定义临界距离[Rmin,Rmax]与临界径向速度[v̂min,v̂max]。目标威胁度可通过V=VR·Vv̂得到。其中VR,Vv̂表达式为

V≤r这一类的目标视为无威胁目标,对其进行维持跟踪;V>r这一类的目标视为有威胁目标,对其进行精跟踪。该算法的目的是使所有目标的跟踪维持在最佳状态,此问题的模型可以表示为
式中Ttrack为采样间隔中用于跟踪的总时间,N为所跟踪目标的总数,m为无威胁目标的个数,n为有威胁目标的个数,γ设定为区分目标是否具有威胁的临界值,η为所设定的跟踪误差阈值。针对上述模型中为两个目标函数求解问题,本文提出了一种基于威胁度的多目标跟踪驻留时间最优分配算法。通过该算法可以求出每个目标的驻留时间。这样可以在每个跟踪周期开始之前获得下一个跟踪周期中各个目标所需的驻留时间。根据所分配的时间采用扩展卡尔曼滤波(Extended Kalman filter,EKF)来估计各个目标的状态。该两步优化算法具体步骤如下。
(1)根据所有目标在第k个采样周期的状态,求出每个目标威胁度,以Vk=γ为界限将所有目标分为两类。不同类别的目标采用不同的标准来进行资源分配。
(3)令B()=η,计算出,如果>0.005Ttrack,令=,反之则=0.005Ttrack;
(6)利用遗传算法求解出,保存,i=1,2,…,N,与各个目标状态相对应。
3 基于BP神经网络的多目标跟踪驻留时间拟合
BP神经网络是一种性能优异的机器学习算法,它不仅在分类问题中有较好的应用,而且对于连续值的回归预测也有着良好的稳定性。因为可以通过各个目标的状态计算得到对应的驻留时间,因此可以把每一个采样间隔中的所有目标状态作为特征,对应的驻留时间作为输出,得到w组训练数据的形式为

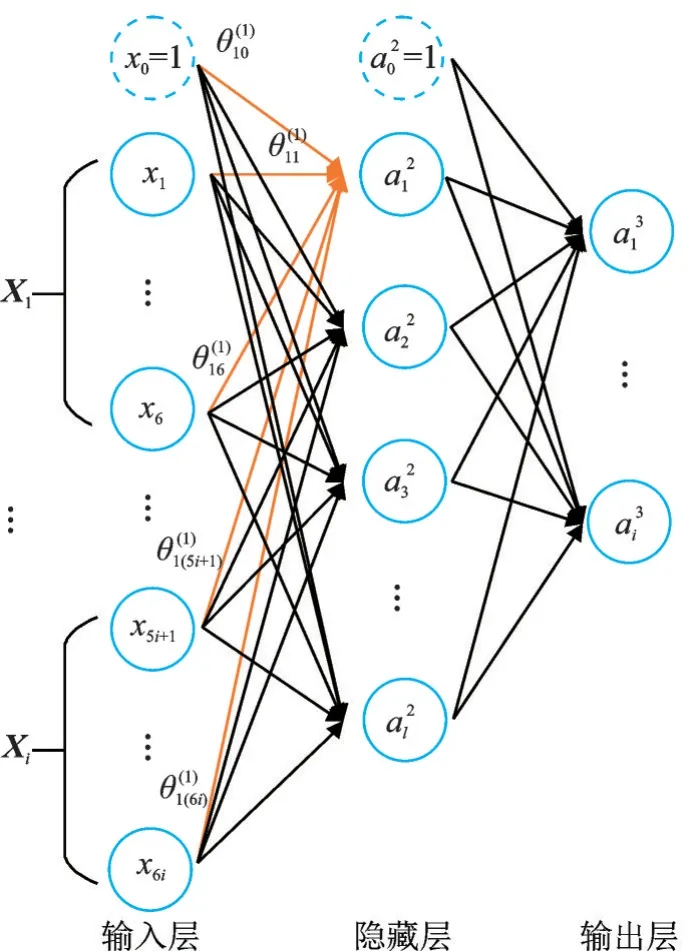
图1 BP神经网络结构Fig.1 BP neural network structure

式中g(z)为激活函数。根据前向传播所计算的输出值hθ(x),将其与对应样本的输出值作对比计算代价函数,使用梯度下降法并结合反向传播算法调整所有层的参数,以最小化代价函数,直到调整后的参数满足训练目标精度或者达到训练次数。其整体的代价函数为

通过上述过程即可得出神经网络通过训练数据学习出的模型,具体流程如图2所示。
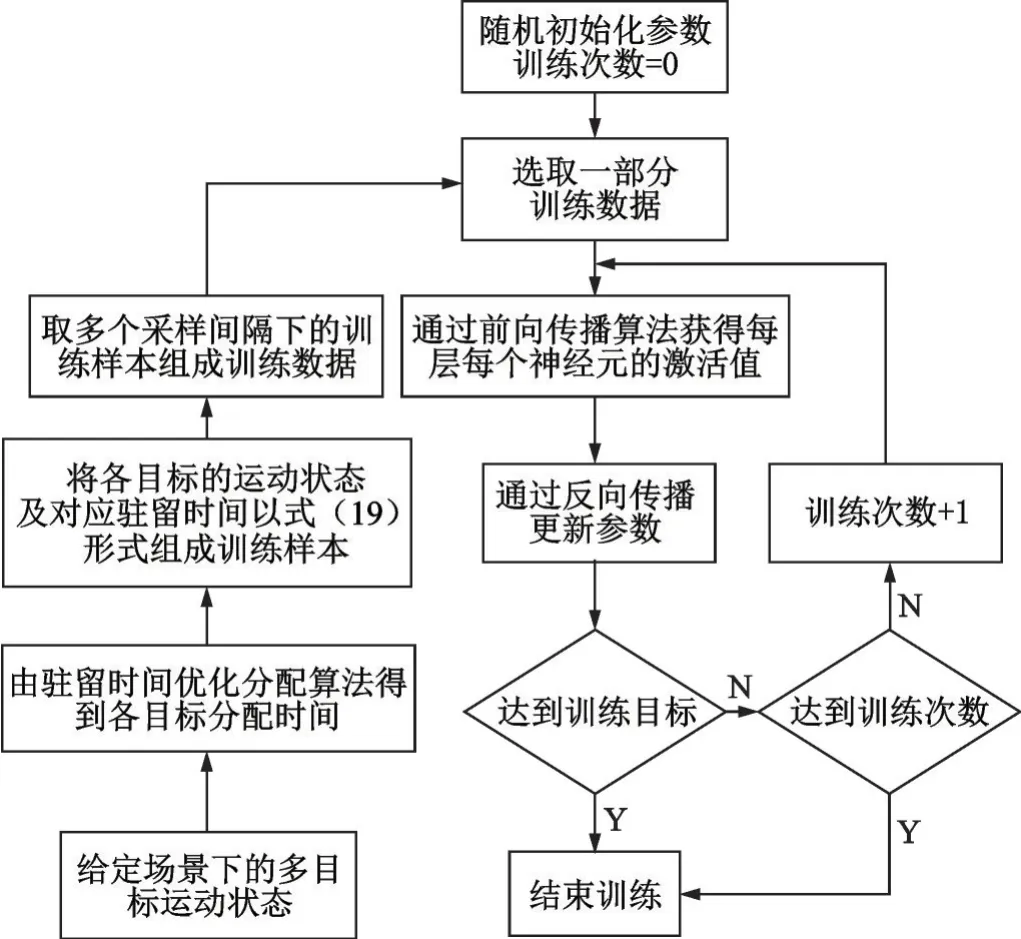
图2 BP神经网络拟合流程图Fig.2 BP neural network fitting flowchart
4 计算机仿真实验
为了验证所提算法的有效性,本节设计了两个对比试验:(1)雷达在相同背景下经过时间资源优化分配与平均分配,对比分析两种分配模式下的雷达跟踪性能与驻留时间分配结果;(2)分别通过时间资源优化分配算法与BP神经网络算法,比较两种方法所得到的时间分配结果以及计算所耗时间。
4.1 仿真参数
在实验场景中,假设相控阵雷达位于坐标原点,且分时对各目标进行跟踪,本次仿真设置所跟踪的目标数为N=3,每个目标的运动方式都不一样,他们的初始状态如表2所示。其中做圆周运动目标的角速度为ω=0.005 rad/s,跟踪帧的总时间资源和采样间隔设置为Ttrack=1.2 s和T=2 s,雷达的发射功率为Pt=3×103W,跟踪误差阈值为η=150 m,脉冲重复周期设为Tpri=10-3s,传输信号的带宽及波长为β=2 MHz,λ=0.003 m。天线的孔径为γ=1 m,光速为c=3×108m/s。本次试验选取30帧数据,目标跟踪的均方根误差(Root mean square error,RMSE)可计算为

表2 目标的初始状态参数Table 2 Initial state parameters of the target

式中NMC为蒙特卡洛模拟次数,本次仿真取为目标的实际位置为在第h次蒙特卡洛模拟中获得的目标估计位置。目标的真实轨迹与预测轨迹如图3所示。
取多组不同的目标初始状态,得到多个不同的运动轨迹,每条轨迹以30个采样间隔为一段滑窗来取3段数据,从而得到以各个目标的状态为输入,对应目标优化后的驻留时间为输出的数据集,数据量为2万,将得到的数据代入BP神经网络中训练,得到相应的网络模型。考虑到所选数据量有限,为了避免过拟合,网络层数为3,隐藏层神经元个数定为10,训练次数设为300次,训练目标精度为1e-6。
4.2 仿真结果及分析
为了证明本文提出时间资源分配方法的有效性,将平均分配时间资源方案用作比较试验,即波束在每一个目标上驻留时间Ti=TtrackN。
由图3可知每个目标的运动轨迹,再根据其运动状态计算出各个目标的威胁度,可知目标1对我方没有威胁,目标2,3对我方有威胁。图4所示为各个目标在优化方案下的BCRLB和与其对应的RMSE,随着迭代次数的增加,RMSE逐渐下降,并且慢慢趋近于BCRLB。可见以BCRLB作为跟踪性能的指标具有一定的合理性。
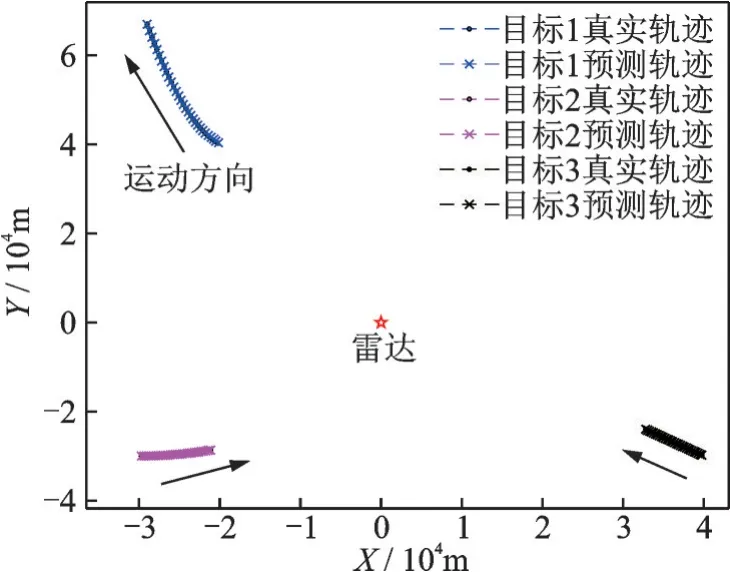
图3 目标的真实轨迹与预测轨迹Fig.3 Real trajectory and predicted trajectory of tar⁃get
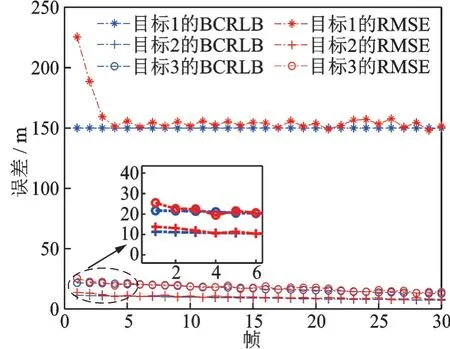
图4 优化方案下各目标的BCRLB和RMSEFig.4 BCRLB and RMSE of the each target under optimization scheme
为了说明本文所提算法相较于平均分配方案的优势,图5给出了两种方案下各个目标的BCRLB。结合图6可知,对于平均分配方案,由于目标1与雷达距离不断增大,且目标的BCRLB与目标和雷达间的距离呈正比,所以对应的BCRLB也随之增大,目标2和目标3的BCRLB也随着目标向雷达靠近呈下降趋势。对于优化分配方案,目标1对我方不存在威胁,雷达对其进行维持跟踪来描述航迹。相较于其他目标,目标1所分配的驻留时间很少,因此目标1的BCRLB远大于平均方案。但随着目标的远离,为了维持跟踪,所以分配给目标1的驻留时间不断增加。而目标2,3向雷达靠近,具有威胁性,雷达分配给它们更多的驻留时间来进行精跟踪,所以优化方案下目标2和目标3的BCRLB要小于平均方案,且分配到的驻留时间大于平均方案。
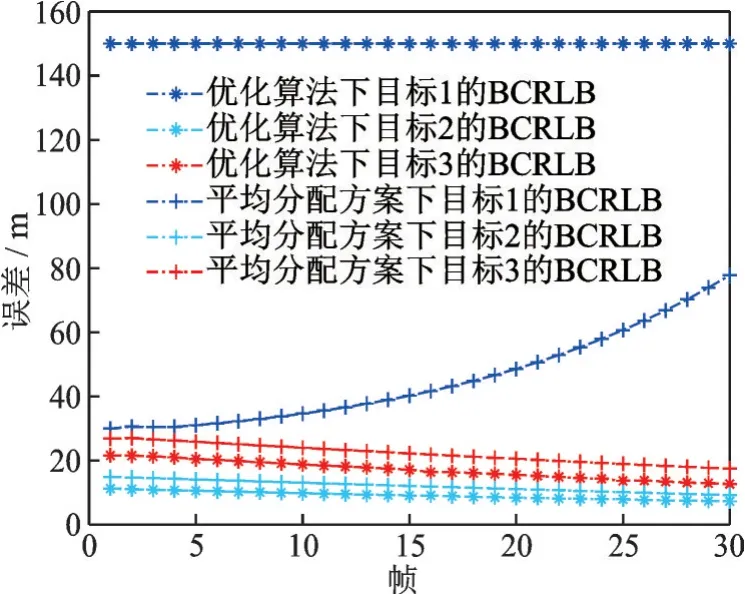
图5 优化方案和平均分配方案各个目标BCRLBFig.5 BCRLB for each objective of the optimization plan and the average allocation plan
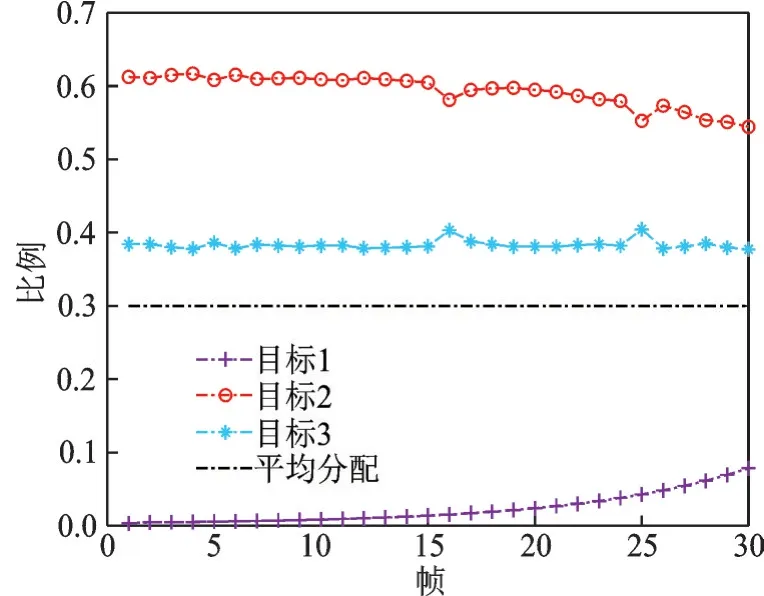
图6 基于BCRLB的时间分配优化结果Fig.6 Time allocation optimization results based on BCRLB
图7所示为本文所提优化模型以MI为目标跟踪性能指标下得到的时间资源分配结果。对比图6可知,随着目标1的不断远离,虽然两种性能指标下目标1分配的时间趋势相似,但是以MI为指标时增长的趋势要大于以BCRLB为性能指标。且目标2分配的时间下降趋势也相对明显许多,但是目标3却无明显变化。这是因为目标3做匀速直线运动,其与雷达间距离变化为线性关系,而目标1和目标2距离变化为非线性的。由此可知,以BCRLB为跟踪性能指标相较于MI具有更好的稳定性,更适用于对机动目标进行跟踪。
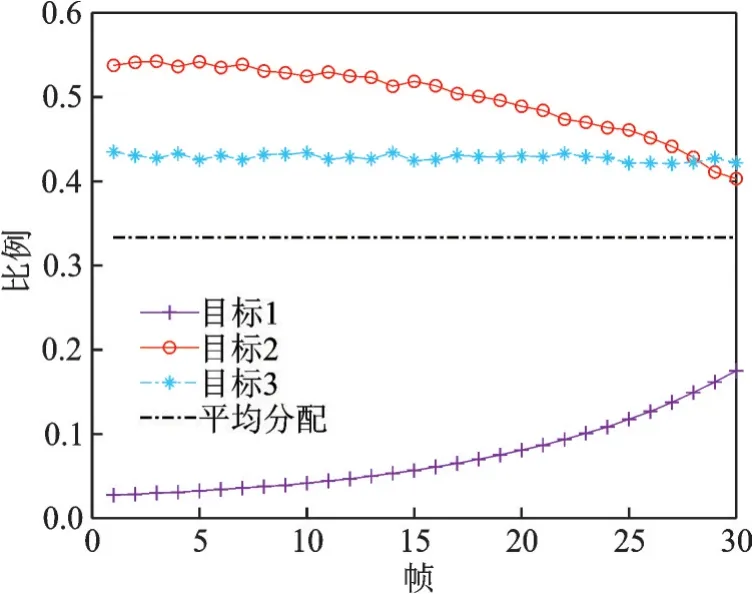
图7 基于MI的时间分配优化结果Fig.7 Time allocation optimization results based on MI
取5组数据集以外的目标状态分别代入本文优化算法以及神经网络模型中,所得的驻留时间分配结果如图8所示。图8可以看出由本文优化算法所计算得到的驻留时间分配结果和BP神经网络做回归预测所拟合得到的结果非常相近,几组数据通过神经网络拟合得到的驻留时间误差精度均在5%之内。因此使用BP神经网络来代替驻留时间分配计算合理且可行。
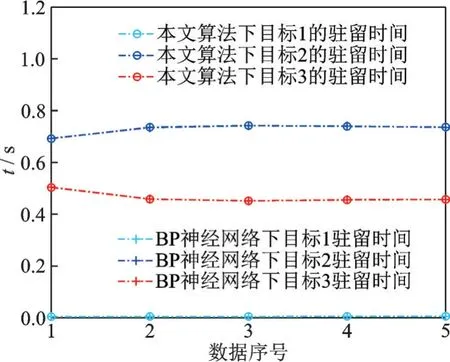
图8 两种方法所得各个目标驻留时间Fig.8 Dwell time of each target obtained by the two methods
统计本文优化算法和BP神经网络算法计算所消耗的时间,结果如表3所示。可知,本文提出的BP神经网络做回归预测所消耗的时间远远少于本文所提出的优化算法消耗的时间,节省的时间以千倍计;并且网络模型训练所用时间相较于本文优化算法已然节省了10倍左右,这样就使得在对多种不同场景下的多目标进行驻留时间分配时,更能体现出BP神经网络在计算过程中的高效性。
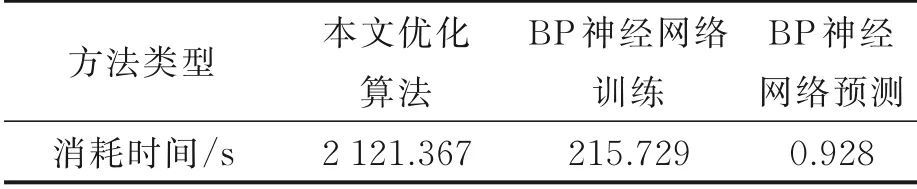
表3 两种算法运行时耗Table 3 Running time of the two algorithms
5 结束语
本文提出了基于BP神经网络算法的相控阵雷达多目标跟踪时间资源分配方案。首先根据目标运动状态,以目标威胁度为标准对目标类型进行划分。其次推导具有时间变量的目标距离估计BCRLB,将其作为分配准则,根据目标的威胁度来选择合适的跟踪方式。最后利用BP神经网络算法代替优化过程,快速拟合出各个目标分配的驻留时间。仿真结果表明,本文所提方案可以根据目标是否具有威胁动态地分配时间资源,同时极大地缩短了计算过程所消耗的时间,证明了该方案的有效性。
猜你喜欢
红领巾·探索(2020年5期)2020-05-19
铁道通信信号(2020年9期)2020-02-06
电子制作(2019年15期)2019-08-27
数学大王·趣味逻辑(2019年5期)2019-06-13
小学科学(学生版)(2019年5期)2019-05-21
小学生学习指导(低年级)(2018年12期)2018-12-29
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
文理导航·科普童话(2015年6期)2015-07-29
数学大世界·小学低年级辅导版(2010年12期)2010-11-27