GNSS RTK技术在城市地形地籍测绘中的应用分析
2022-02-22 00:38刘飞鹏
中国新技术新产品 2022年22期
刘飞鹏
(江西核工业测绘院集团有限公司,江西 南昌 330199)
0 引言
随着国民经济的快速发展和科技水平的不断提高,城市建设逐渐在各个地区告诉发展。而在城市建设过程中,测绘工作越来越重要,是城市进一步发展不可或缺的技术保障。作为城市测绘工作的主体内容,地形地籍测绘能够最大程度地为城市规划、土地管理提供必要的数据信息,对城市经济发展大有裨益。但地形地籍测绘工作极其复杂,并且要求较高的精度,因此需要更优的技术基础。
基于卫星定位的实时动态载波相位差分技术(Global Navigation Satellite System Real-time kinematic,GNSS RTK)能够获得更精确的定位,在城市地形地籍测绘中有广阔的应用前景[1]。因此,该研究将对GNSS RTK技术进行系统分析,并将排序QR分解算法(Sorted QR decomposition, SEQR)应用于RTK技术中取代常规的最小二乘模糊度降相关平差法(Leastsquare Ambiguity Decorrelation Adjustment,LAMBDA),以期更好地应用于城市地形地籍测绘。
1 GNSS RTK技术在城市地形地籍测绘中的应用
1.1 GNSS RTK测绘技术
GNSS RTK通过差分技术减弱或消除基准站与流动站之间的共有误差,在一定程度上提高了测量结果的精度,并且实现了实时监测。GNSS RTK测量系统由无线电数据通信系统和GNSS接收机连接而成,通过空间距离后方交会,利用两台以上接收机获得待测点位置。GNSS RTK先通过GNSS卫星获得一定的信息数据,并以数据链形式传至接收机中,然后由RTK载波相位求解标准坐标位置精度并返回,最后得到精准的测量值。GNSS RTK技术链接过程如图1所示。

图1 GNSS RTK技术链接过程
GNSS RTK中RTK实现高精度定位的关键是整周模糊度解算。一般而言,通过平差估计能够在短时间内得到一个模糊度解,但此模糊度解在多数情况下为浮点解,即并非整数。而整周模糊度所要求的真实解是整数,所以为得到更高精度的解算,必须对浮点解做必要的处理。模糊度解算方程如公式(1)所示。

式中:L为观测方程中的余数项;X为一系列坐标组成的实数未知参数;Y为整数未知参数,由双差模糊度形成;A为实参数系数矩阵;B则为整参数系数矩阵;ε为误差值。
通过最小二乘法或者卡尔曼滤波对模糊度解算的方差进行平差求解,能够求出模糊度的浮点解,获得其协方差信息。同时通过LAMBDA方法可以执行降相关和搜索,得到模糊度整数解。模糊度解算几何模型根据全部卫星观测信息减弱了误差的不利影响,在一定程度上提高了模糊度固定成功率,但伪距低精度等问题的存在也会导致计算量增大,影响算法效率的提升。因此该研究将SEQR算法应用于模糊度降中,该算法是基于排序的降相关算法,能够在高斯降算法执行前通过排序矩阵进行模糊度协方差矩阵的排序。当协方差矩阵为对称正定矩阵时,通过排序矩阵P将其对角线中的元素最小值移至处,如公式(2)所示。

式中:q为行向量;qmin为元素最小值;Q为Q(n-1)维子矩阵。随后通过公式(3)进行矩阵Q的更新计算。

式中:di为条件方差;为协方差矩阵的更新。
在Q维度降维1时,条件方差dn=Q11。通过多维整数高斯变换处理排序的矩阵在|lij|≤0.5(i>j)条件满足后,即获得所需的降相关矩阵。
1.2 GNSS RTK技术的城市地形地籍测绘
GNSS RTK技术在城市测绘的实际工作中通常包括三类不同的运作状态,即准动态、快速静态和动态。一般来说,在快速静态定位实施时,必须以充分分析客观环境为基础,并使GNSS在所有相关的站点中都拥有必需的接收设备,以完成对数据的顺利分析[2]。此时的信息处理设备是静止的,即在面对数据时不会发生剧烈改变。在其测量过程中要获得所需站点的三维坐标,则需要其发挥相应作用,确保所得误差始终维持在合理空间,并最终达成定位。而在动态定位测量模式中,初始化数据的采集是首要关注点。在这种模式下,由于存在某些静止状态的站点,所以需要预先对其处理,并完成相关信息的提取,最后将其输送到流动站的接收机以完成测量。准动态定位与前者相似,区别在于流动站接收机在获得所需信息的相同时间内会对初始信息进行自动识别和处理,使观测在三维坐标中得到充分确认,适用于复杂地形地籍测绘。
在距离基准站15km的辐射范围内,GNSS RTK技术都能实现数据的测量,并且重要地物点也能被迅速定位,所有权属介质点都能完成测定,以在短时间内得到地图和地籍信息。在对城市进行地形地籍测量之前需要做好一系列的准备工作,才能促进测绘的正常开展。而GNSS RTK技术在城市地形地籍测绘中的最大优势则是以卫星定位的方式提高测量准确度,进而确保所得结果的安全性与可靠性[3]。在GNSS RTK技术工作原理的基础上设置三维坐标体系,选择城市附近的流动站。然后进行测量。为了方便地形地籍测绘数据的接收和发送,需要预先连接流动站接收机,这是必要的一步。GNSS RTK技术进行城市地形地籍测绘的具体步骤如图2所示。
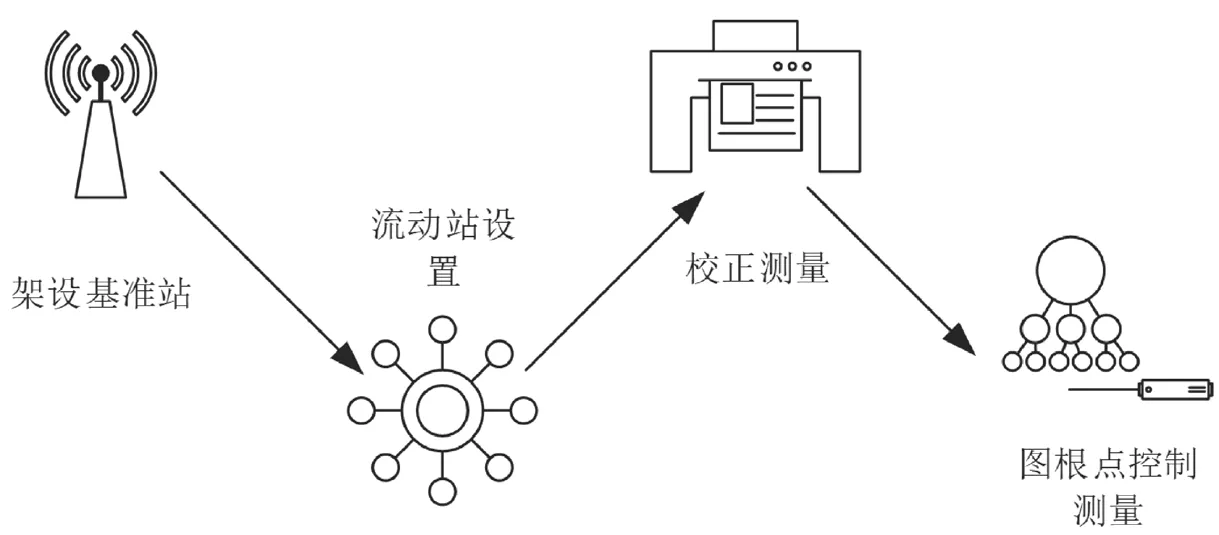
图2 GNSS RTK技术进行城市地形地籍测绘的具体流程
在基准站架设完备的基础上,流动站中的相关设备需要与无线电GNSS接收机端实现连接,并输入流动站次数、测量时间等必要的数据信息。完成已知流动站位置设置后,通过三维数学坐标体系的运算过程得到基准站位置。因为进行基准站点设置时,站点并不是绝对固定不变的,所以需要根据确定的测量点对有效坐标位置进行及时校正,如此才能确保测量结果有较高的准确率。进行图根点位置的安置时,必须在第一步就将图根点之间的距离控制在100m以内,并确保各个图根点在点位变更时也随之改变。这样做的目的是方便安设测量仪,同时保证定向地籍测量顺利进行。在一般情况下,地形测量需要布设控制点,以此绘制成地形图。即以等高线为出发点,从高到低逐级安置相应的控制点,再由此获得目标对象位置,并在绘图标准下进行绘制。而应用GNSS RTK技术可以省略控制点安置环节,减少此类不必要工序对测量过程的干扰。GNSS RTK技术通过基准控制点的布置能够实现地物点、地形点和界址点坐标的快速测定,然后在相关软件帮助下进行测绘矢量图的绘制。
2 GNSS RTK技术在城市区域测绘中的应用分析
GNSS整周模糊度固定LAMBDA算法的求解是GNSS高精度定位中的关键性问题。当整周模糊度被正确且快速固定时,其可以令GNSS的定位精度达到厘米甚至毫米级别。并且该算法首次提出了解相关的概念,通过Z变幻对描述模糊度之间的相关关系的模糊度协方差做出降相关处理,以此提高整周模糊度的搜索速度。当前,LLL算法是Z变幻算法中较为新颖的一种模糊度降相关处理方法。该次研究将排序QR分解算法SEQR应用于RTK技术中取代常规的最小二乘模糊度降相关平差法LAMBDA。先对SEQR算法在模糊度降中的应用效果进行分析,并与LAMBDA和LLL算法进行比较。评价指标一共有四种,分别为条件数、搜索耗时、总耗时和规约时间。规约时间为降相关完成所需的计算机CPU时间,搜索耗时为搜索模糊度整数解所需时间,总时间则是二者之和,条件数表示降相关矩阵对角化程度。试验在MATLAB R2017b上进行,三种方法的累积分布函数结果如图3所示。
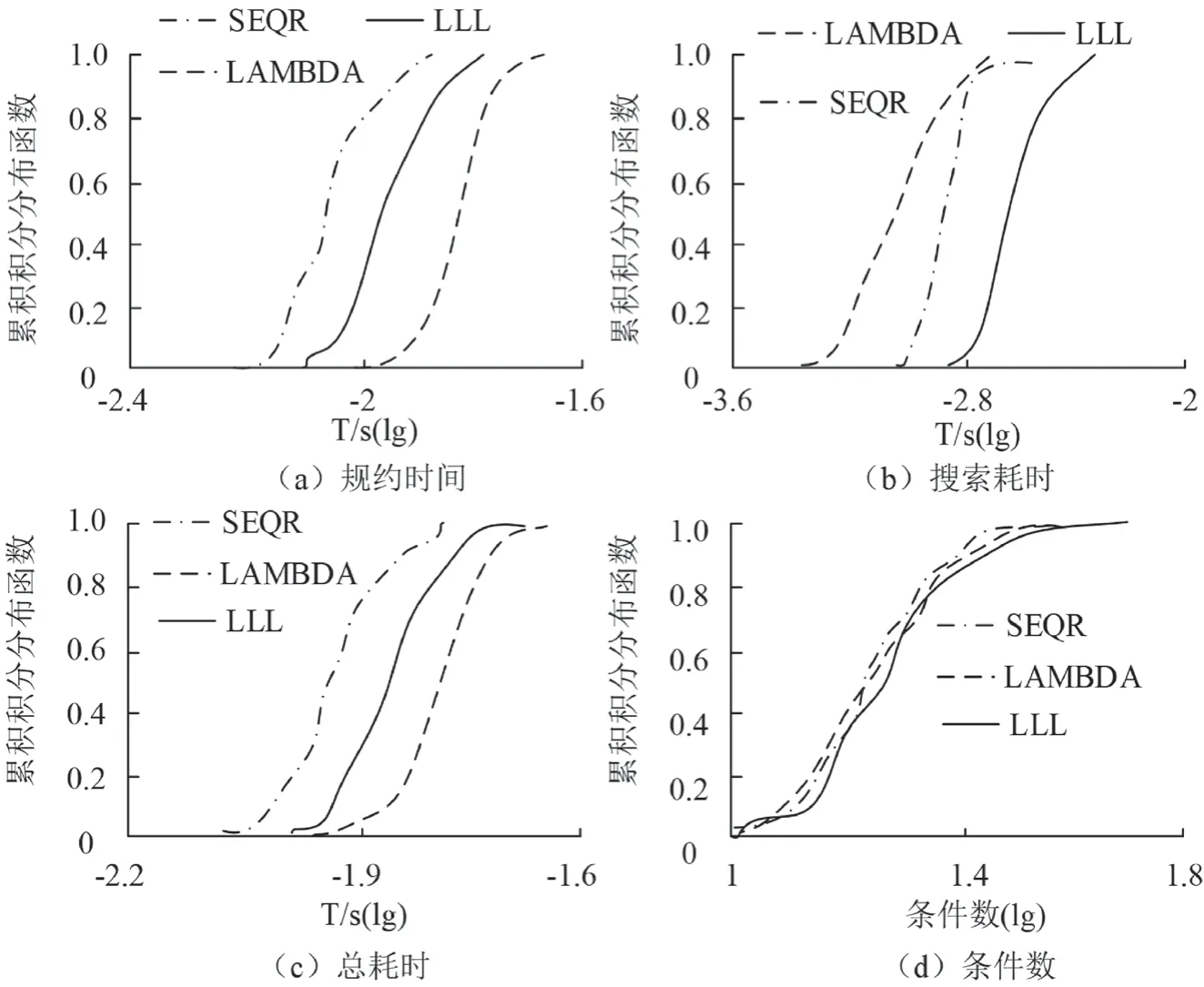
图3 SEQR、LANBDA和LLL算法的的平均解算结果
图3 中lg为坐标轴取对数。由图3(a)可知,SEQR算法的降相关时间比LLL算法的解算结果要小。从图3(b)可以看出,LLL算法在搜索时间上比SEQR算法及LAMBDA算法效果差,SEQR算法的规约时间最短,与LLL算法相比,时间节约了将近1/2,平均规约时间为0.0091s左右。由图3(c)可以发现,SEQR算法虽然在搜索耗时方面并不占优,但总耗时仍然最短,为0.0119s左右。并且由图3(d)可知,SEQR算法的条件数更小,矩阵对角化程度较优,说明该算法性能更好。综上所述,SEQR算法在总体性能上的表现效果最好,其总体解算效率相对较高。在部分情况下,LLL算法的降相关效率较高,但总体解算效率仍低于SEQR算法。LAMBDA算法在三种算法中总体效率最低。
再将该算法应用于GNSS RTK技术中进行实例验证。该研究选择国内某二级城市的特定区域作为研究对象加以验证。所选区域大概13km²,区域内的人口总数为2万人左右。此次测绘区域中,城市居民用地所占面积大约为总测绘面积的2/3。该区域内环境相对复杂,整个视野情况相对较差。对房屋密集处或者信号不好的区域,借助全站仪加以配合,以实现地形的测绘。在地籍调查和测量中,针对街道宽度较大的区域,以载波相位作为观测基础,按照差分测量实现准确观测。在测量区域内,研究确定了8个界址点为界址点,并且这些界址点是均匀分布的,可为遥感图像的精确校正提供基础保障,由此能够得到正射影图像。
通过实地考察,该研究进一步发现,与一般城市的建筑相比,该区域的居民区建筑都比较低矮。所以研究在所测区域的中心位置,在6层楼顶安放基准站,设定其与现存的基准站相差1km~2km。根据国家高程基准对已经生成的三维坐标实施参数转换,并且在解算完成后严格检查所有垂直、水平残差,使其均不会超过所规定的最大限制范围,以保证已经实现的参数转换不会出现较大偏差。为了使待测点同样不会产生过大的误差,采集了各个时间段的观测数据,并且通过取平均值的方式控制高程与平面的误差。将GNSS RTK所得数据与原有地形地籍点做比较,通过随机抽查得到部分地物间距,结果如图4所示。
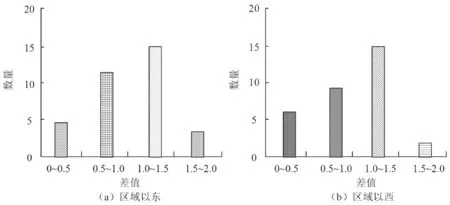
图4 实测地物间实距与图距之间的差值统计
从图4(a)可知,在所测区域的以东的地方,其坐标误差在0cm~0.5cm以内的标志点为5个左右,绝大部分的标志点误差都集中在0.5cm~1.5cm,并且超过1.5cm误差的标志点较少,数量有3个左右。从图4(b)可知,在所测区域的以西的地方,其坐标误差在0cm~0.5cm以内的标志点为6个左右。而绝大部分的标志点误差都集中在1.0cm~1.5cm,超过1.5cm的坐标误差数量仅2个左右。说明应用SEQR算法的GNSS RTK技术所得结果能够满足标准测量要求,且具有较高的测量精度。最后将其与全站仪测量法进行比较,以测量所消耗时间即效率作为比较内容,所得结果如图5所示。
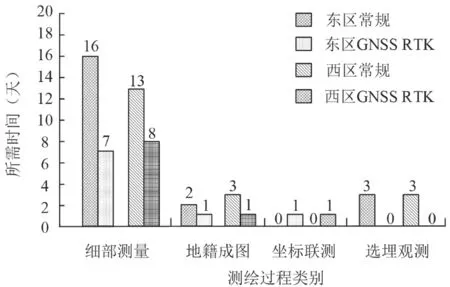
图5 不同方法测量效率对比结果
由图5可知,全站仪测量方法在所选区域以东的西部测量天数为16天,而GNSS RTK仅需要7天,同时全站仪测量的地籍成图时间为2天,而GNSS RTK为1天。虽然GNSS RTK测量多了1天的坐标联测,但常规方法却需要3天的选埋和观测,因此GNSS RTK总共节约了12天,效率提升了43%。同样在西区,GNSS RTK测量方法所需时间总共为10天,与东区耗时基本一致,而与全站仪测量的19天相比,节约时间为9天,效率提升了47%,具有更高的测量效率。综上所述,GNSS RTK技术具有更高的精度和运行效率。
3 结论
城市地形地籍测绘是城市实现合理规划的重要基础。在GNSS RTK技术的逐步发展下,城市测绘工作的技术基础和理论基础的进一步优化得到了显著增强。该研究首先剖析了GNSS RTK技术链接过程,将SEQR算法应用于RTK技术中。然后取LAMBDA算法,将其应用于城市地形地籍测绘工作中,分析了具体实现过程。最后通过设计城市测绘实例对该项技术的实际表现加以分析评价。结果显示,SEQR算法的规约时间最短,平均规约时间为0.0091s左右,算法性能更好。将该算法应用于GNSS RTK技术中所测坐标误差值绝大部分在1.5cm以下,测量精度较高。在测量效率的比较中,该项技术所需时间最低为9天,效率最高提升了47%,为其进一步应用于城市规划提供了参考方向。但该研究在分析处理实测数据时,很大程度上依靠数学软件进行,难以输入并运用于地籍软件,因此有待深化探究优化坐标转换模块的方法,以实现二者的兼容。
猜你喜欢
中国港湾建设(2023年12期)2023-12-27
科学导报(2023年84期)2023-12-17
浙江国土资源(2019年10期)2019-10-31
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
黑龙江工程学院学报(2015年2期)2015-04-19