深度学习技术在海底管道巡检中的研究与应用
2022-02-22 00:38宋哲旭徐志毅李学成陈开润李小斌
中国新技术新产品 2022年22期
宋哲旭 徐志毅 曾 晋 李学成 陈开润 李小斌
(1.中海石油(中国)有限公司深圳分公司,广东 深圳 518000;2.中海辉固地学服务(深圳)有限公司,广东 深圳 518000;3.重庆米弘科技有限公司,重庆 400000)
0 引言
由于冲刷腐蚀、拖网锚害等原因,海底管道频繁发生事故,因此准确掌握海底管道状态可以及时预防和排除安全隐患。随着海底管道铺设距离和运行时间的延长,海底管线巡检技术亟需迭代升级。
邢海燕等人提出了一种IPSO-GRU神经网络对海底管道缺陷进行定量识别,获得96%的识别精度[1]。罗东浩基于深度学习方法检测管道的泄漏点,达到了较好的实时性和准确性[2]。马建民等人设计了一种基于光视觉技术的自主巡检系统,识别准确率达96%,但该系统仍缺乏深海试验[3]。东京大学研制了一款名为Twin-Burger2的水下机器人,对水下管道进行跟踪,但在海底环境无法进行实时性应用[4]。KHAN A等人提出了一种图像恢复和增强算法,能够处理水域较浑浊的情况[5]。SCHØYEN等人提出了一种基于多波束回声测深仪数据的自动化管道探测方法,为海底管道智能巡检提供了新思路[6]。
该文基于ROV采集的海底管道图像提出了一种深度学习检测技术,建立了一套巡检系统辅助识别海管事件,以解决人工巡检存在的漏检、误检等问题,提高巡检作业效率。
1 深度学习检测技术
深度学习检测技术避免了传统机器学习的大量手工设计特征工作,并且能取得更优的检测结果。海底管道巡检需要识别的事件包括海管节点(fieldjoint)、阳极(anode)、杂物(debris:金属、塑料、木材和渔网等)、支撑(sleeper)、悬空(freespan)、抛石(gravel)以及沙包(sandbag)。
1.1 数据集预处理
该文数据来源于ROV巡检某海管采集的左、中、右3路视频。中路图像存在对比度低以及细节模糊等问题,采用多操作联合增强技术可获得稳定的清晰图像。该文方案采用优化对比度增强[7]、限制对比度自适应直方图均衡化(CLAHE)[8]以及色阶调整等操作实现图像增强。图像增强效果如图1所示。
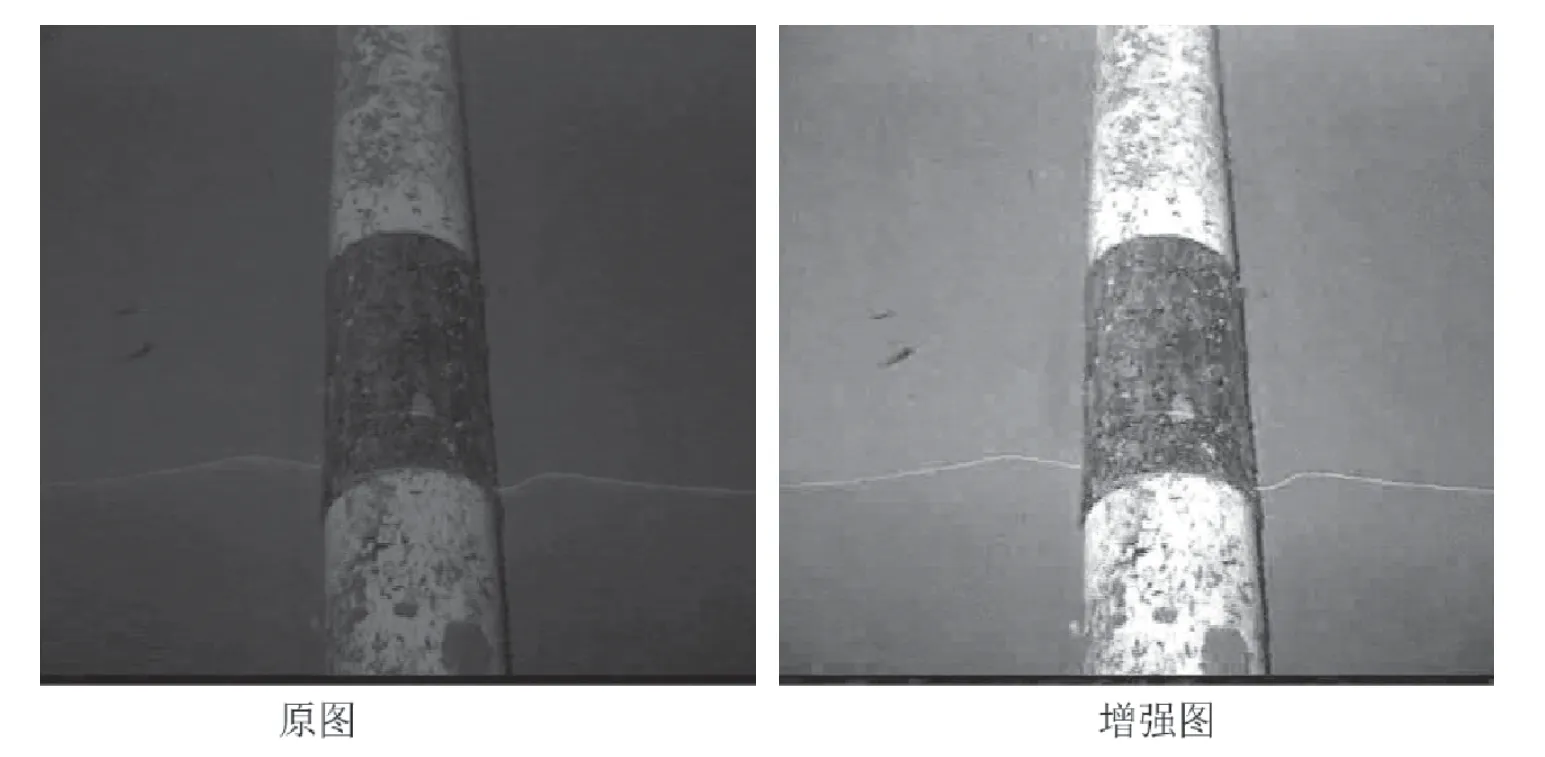
图1 图像增强
1.2 基于YOLOv5的事件检测模型设计
由于事件的多样性和海底图像质量低下等问题,该文平衡检测速度与检测效果,选取了Anchor based中的一阶段法YOLOv5(you only look once)端到端的训练目标检测模型,以识别事件的具体类别和位置。
1.2.1 数据集构建
该文选取8 936张分辨率为720×576的图像进行检测模型的训练,其中训练集和验证集的比例为17∶3,测试集来源于ROV巡检的实时图像。试验的每个评估指标通过5折交叉验证并最终取平均结果。所有试验均在Amax NVIDIA Titan V一张12G GPU的服务器上进行。
1.2.2 YOLOv5网络搭建
该文基于YOLOv5搭建了深度学习检测模型,模型结构如图2所示。
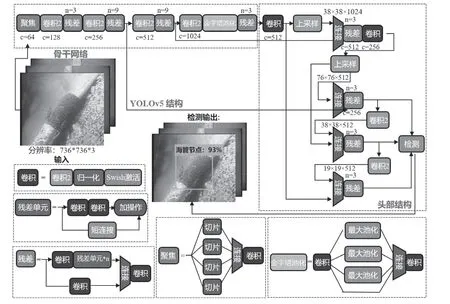
图2 YOLOv5模型结构
骨干网络用于海管图像的特征提取,其中聚焦是指进行下采样操作,以减少计算量;残差单元用于学习更丰富的特征;金字塔池化可实现局部特征和全局特征的特征图级别的融合。YOLOv5先将输入图片缩放到统一尺寸,然后送入骨干网络,最后处理网络预测结果,得到检测的目标。其中,YOLOv5采用了马赛克(Mosaic)数据增强,在一定程度上解决了数据量缺乏的问题,还采用非极大值抑制算法解决了一个目标被多次检测的问题,能在检测的同时实现分类。训练YOLOv5检测模型的损失函数由3个部分组成:置信度损失Lobj、类损失Lclass和位置损失Lbox。
Lobj和Lclass考虑了正、负样本不均衡的影响,如公式(1)所示。在Lobj中,y′i为预测输出的置信度,yi为真实概率0或1。在Lclass中,y′i为模型的预测输出类别,yi为样本的真实类别。

其中σ(y′i)=1/(1+exp(-y′i))。
Lbox采用了GIoU Loss,如公式(2)所示。其中GIoU表示对2个任意框A、B,找到一个最小的封闭形状C,让C把A、B包括在内,计算C中没有覆盖A和B的面积占C总面积的比值,然后用A与B的交并比(IoU)减去这个比值。最后用1减去GIoU,转化为最小值的优化问题。

1.2.3 对比方法
本节选择了SSD[9]、EfficientDet与该文方法做对比。SSD使用anchor机制,易于训练和集成。EfficientDet提出了目标检测网络联合调整复杂度的策略,在COCO数据集上取得了较好的效果。该文通过这2种方法进一步验证该文方法的有效性。
1.2.4 评价指标
海管事件检测以帧率FPS、均值平均精度mAP作为评价指标。FPS用来评估目标检测的速度,即每秒内可以处理的图像数量。对类别为C的事件,在一张图像上的精度PC如公式(3)所示,TP为正确检测的事件数量,FP为未正确检测的事件数量(错检、漏检)。

类别为C的事件在所有图像上的精度如公式(4)所示,其中N为图像总量。

所有类别的事件在所有图像上的精度如公式(5)所示,Nc为类别数量。

mAP在固定的数据集上计算,在分析模型结果的同时查看各类的平均精度,避免了对某些易检测类别的偏好,适用于比较不同目标的检测方法。
1.2.5 试验结果及分析
海底管道事件检测结果见表1。EfficientDet通过设计的BiFPN结构取得了88%的mAP,SSD使用的Anchor机制不利于小目标的检测。SSD与EfficientDet由于参数量和网络结构庞大,因此检测效率不高。YOLOv5通过回归实现了端到端的目标检测,取得了最高的mAP和FPS。每类事件的具体检测结果见表2。
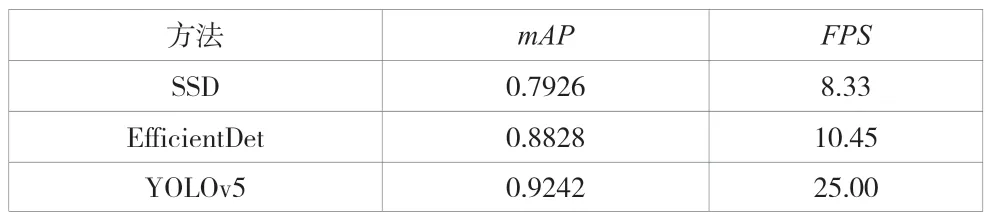
表1 事件检测结果
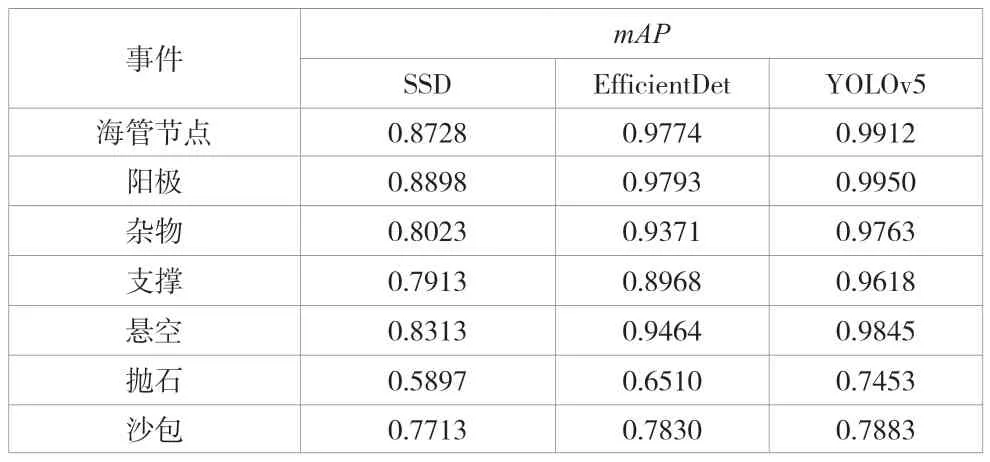
表2 每类事件检测结果
由表2可知,对海管节点、阳极、杂物、支撑等特征比较明显的事件,YOLOv5取得了高于95%的精度,可有效用于海管巡检系统。直观的检测结果如图3所示。SSD与EfficientDet仍存在较多的错检和漏检情况,而YOLOv5适合各类事件的检测,且能克服水图像偏色、模糊以及较暗等问题,证明了该文选取的YOLOv5检测方法在精度和速度方面能基本满足海管巡检系统的要求。
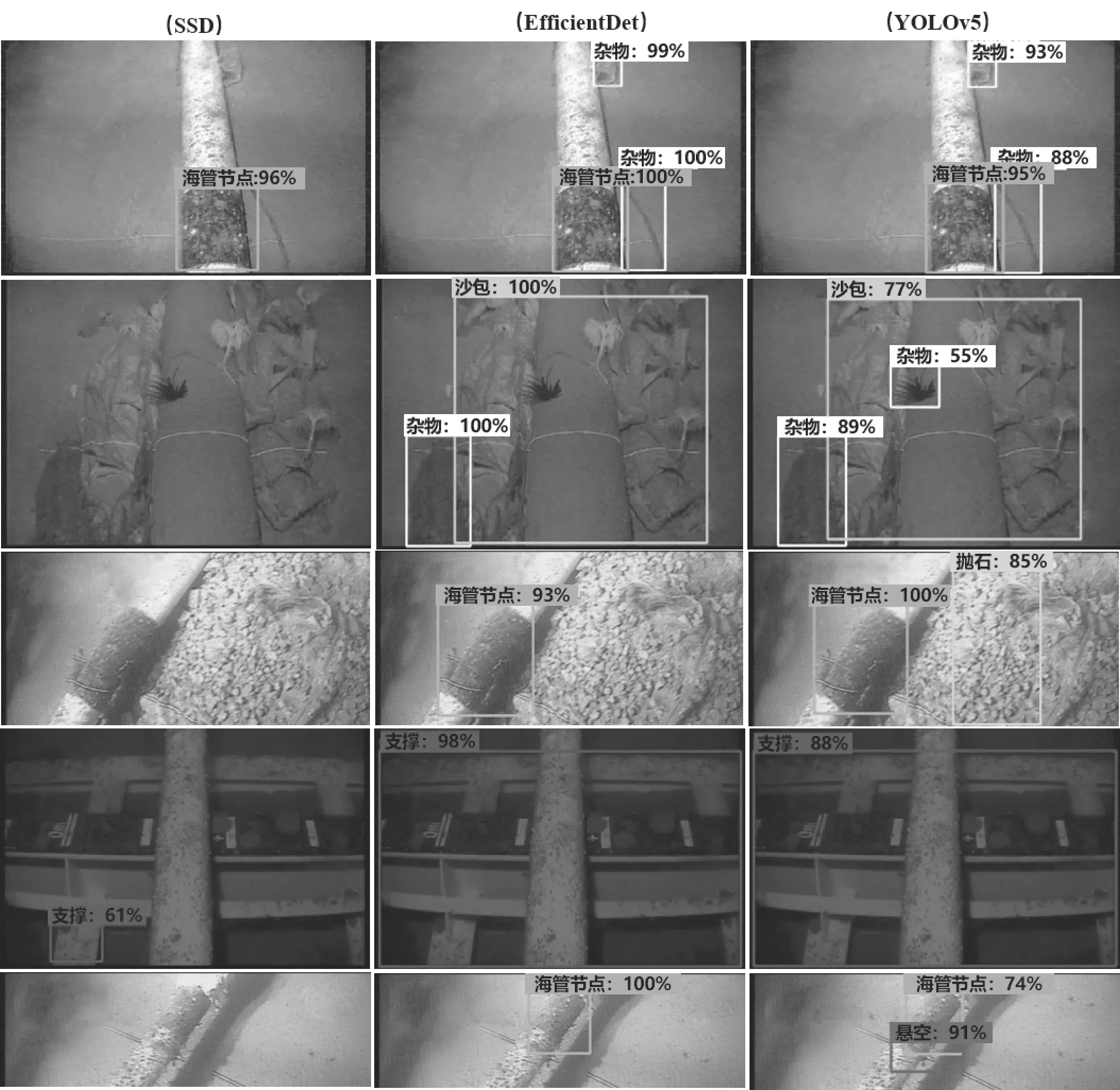
图3 事件检测结果
2 海底管道巡检系统设计
海底管道巡检软件系统是结合深度学习算法训练的检测模型与巡检作业业务流程开发的应用软件。巡检软件系统功能包括海管管理、用户管理、事件类型、事件管理、参数设置、巡检任务、设备管理、离线视频、巡检操作以及事件记录等模块。功能结构如图4所示。
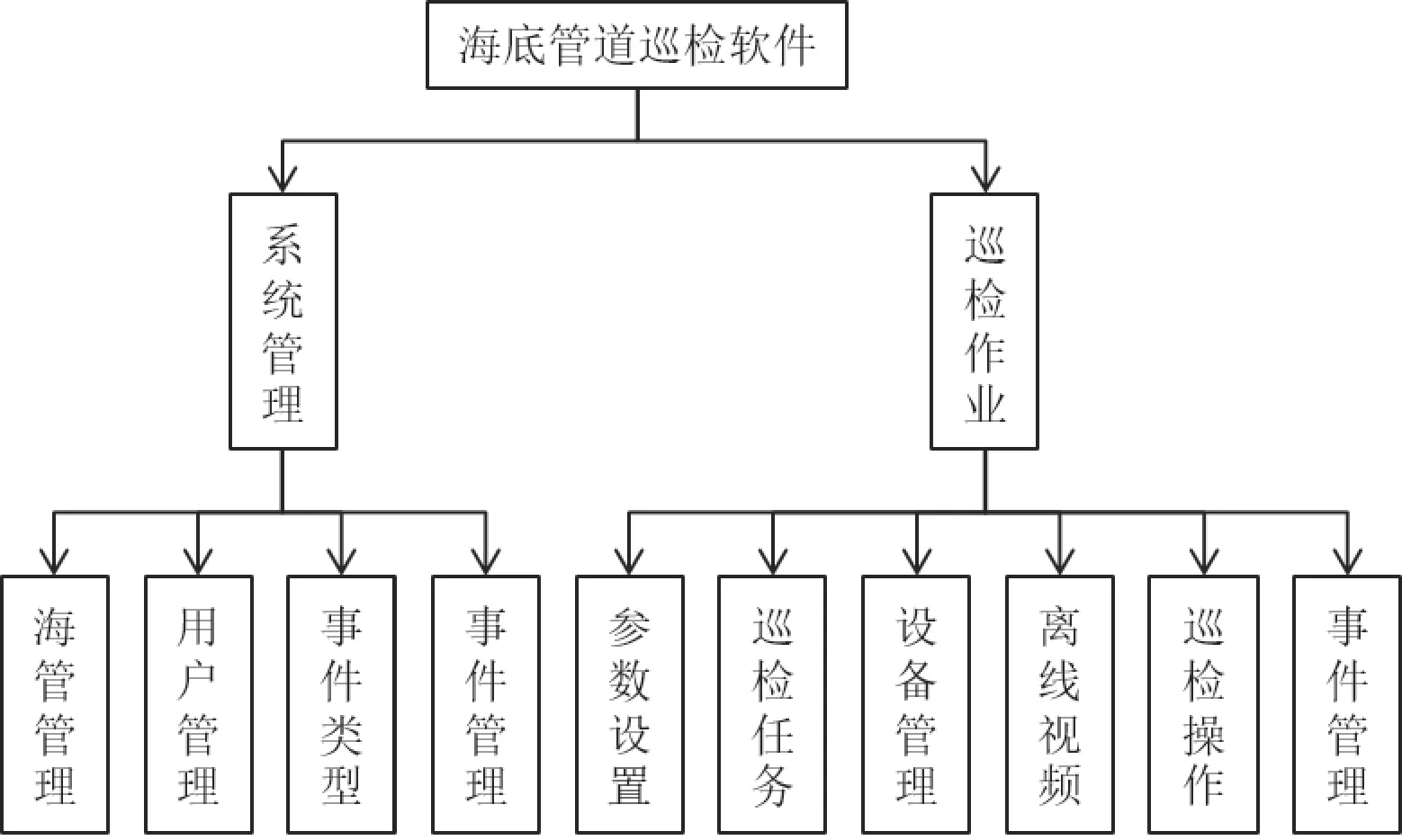
图4 海底管道巡检软件功能结构
海底管道巡检软件客户端为巡检作业用户日常工作操作的主入口,用户登录进入系统后,可进行参数设置、创建巡检任务、执行巡检任务、进行设备连接、播放ROV视频、开启事件检测、记录异常事件和导出巡检报告等业务操作。海底管道巡检软件主操作界面包括巡检操作区、视频显示区、事件列表区、定位数据区以及上次巡检事件区等区域。巡检操作区域包括连接/断开ROV、开始巡检、暂停巡检、视频选择和图像增强等操作入口。视频显示区域用于显示三路视频实时的检测效果。事件列表显示巡检过程中检测到的事件,包括事件代码、事件级别、事件发生位置以及是否是异常事件等信息。定位数据区域显示当前海管巡检到的具体位置,包括经纬度、到达的海管长度等。上次巡检事件区域显示之前对同一根海管巡检所检测出的事件记录,用于与本次巡检结果进行比较,进而检查之前发生的异常事件是否已修复。
3 结论
海底环境复杂多变,海底管道会不可避免地遭受自然侵蚀和磨损,而人工巡检效率低下,误检率与漏检率居高不下,因此该文提出了一种基于深度学习技术的海底管道辅助巡检方法,可自动识别各类事件并进行记录。系统主要通过目标检测方法确定事件的具体位置和类别,并通过巡检系统记录识别的事件,供后续分析查询。海底试验表明,和人工巡检相比,该方法大大提升了海管巡检的效率和准确率。未来将进一步完善海底管道巡检系统识别事件的种类,并对悬空、抛石及破损等事件进行定量分析。
猜你喜欢
机械工程师(2022年12期)2022-12-21
化工机械(2022年4期)2022-09-02
电子制作(2018年11期)2018-08-04
测绘科学与工程(2016年5期)2016-04-17
新校长(2016年8期)2016-01-10
海洋工程(2015年3期)2015-11-22
电子设计工程(2015年3期)2015-02-27
商事法论集(2014年1期)2014-06-27
石油工程建设(2014年5期)2014-03-20
中国中医药现代远程教育(2014年16期)2014-03-01