多无人车协同编队控制研究现状及发展
2022-02-28 22:39邓国琛李猛
交通科技与管理 2022年3期
邓国琛 李猛
摘要 无人车也称为陆地自主车,是一种地面移动设备。编队控制问题是多无人车系统协调控制中的一类基本问题。在一些特殊的任务和环境中,无人车需要在一定的约束条件下达到和保持一定的几何结构,灵活、快速地适应环境,进而在复杂环境中高效、可靠地执行任务。文章对无人车系统的编队控制策略及相关问题做了总结,针对多无人车控制系统开发过程中涉及的多车协同、任务分配与调度中各类型方法的基本原理、代表性研究以及优缺点进行了梳理。最后对多无人车协同编队所面临的机遇和挑战进行了展望。
关键词 无人车;编队控制;任务分配与调度;协同控制
中图分类号 V279 文献标识码 A 文章编号 2096-8949(2022)03-0028-03
0 引言
无人车系统主要由运动控制系统、环境感知系统、路径规划系统、自动定位系统等系统组成[1-2]。
随着无人车系统研究的不断深入,无人车系统协同编队控制研究的重要性和优越性在各个领域得到体现[3]。与单一无人车相比较,多无人车系统协同编队控制的优越性体现在以下几个方面[4-5]:
(1)在空间和时间两个方面更好地实现资源合理利用。
(2)每个无人车通过通信传输可以获得更多的信息。
(3)不再被每个无人车的功能强弱束缚。
(4)通过无人车之间有效、规律的配合,无人车系统能够完成更高难度的任务。
结合上述优点,无人车系统的编队控制在多个领域都得到广泛应用,研究促使无人车系统更高效完成更多、更高难度任务的协同编队控制方法已经成为目前科学研究的重点和热点。
1 编队控制问题研究
1.1 多无人车编队控制任务描述
编队问题是多无人车系统协同控制中的一类基本问题,针对特定的应用场景,类如工厂中的巡检无人车,在这类的环境中会有诸多障碍,需要无人车运用多种灵活的队形通过,在明确任务约束和编队队形后,则需要设计系统的运动规则及控制方式,使得无人车在规定的时间到达规定的地点[6]。
无人车编队控制由队形的形成、保持和变换三个不同的部分组成。队形的形成,即原本处在随意位置随意姿态的无人车,通过一定的控制逻辑,形成所期望的队形。队形的保持的含义是指在已经形成期望队形的情况下,整个无人车系统在指定路线上移动。队形的变换是指无人车系统在行进的过程中,出现了阻拦行进队形导致行进队形难以保持的情况,这时就需要通过调整队形通过障碍后再转变为之前的队形。
1.2 编队控制方法分析
在经过对编队控制领域不断地探索和总结后,逐渐形成了以领航跟随法、基于行为法、虚拟结构法为代表的多种编队控制方法。下文将详细研究这三种编队控制方法并针对其优缺点进行分析。
1.2.1 领航跟随法
领航跟随法是指在多无人车编队中,设定一个或多个无人车作为编队的领航者,其他无人车作为跟随者[7-9]。领航车可以获取整个编队系统的任务信息并进行相应动作,而跟随车通过获取领航者的位置信息且确定期望相对距离与角度,从而实现编队控制。因此,通过控制领航者的轨迹,就可以控制整个无人车系统整体行为。
2014年,瑞士苏黎世联邦理工大学 Nageli 等通过观察自然界鸟群编队利用机载视觉感知设备和通信设备结合卡尔曼滤波算法对编队状态进行估计,提出了完全分布式的领航跟随法编队控制,在室内和室外两个条件下进行了实验[10]。
2018年,北京交通大学的李润梅团队研究改进了领航跟随法,首先提出了无人车以时变的相对距离和相对角度跟随行驶的控制问题[11]。通过设立领航者和跟随者之间特定的误差模型,再把其相对距离和相对角度转变为时变量。新颖的运用 Barbalat 引理从不同的角度印证跟踪误差渐近收敛。Matlab仿真结果可以看出跟随车的跟随情况符合预期设想。
Hog等人用比例算法和PID算法从不同角度将领航跟随的编队控制实现[12]。文献[13]提出了控制连接图为连通时编队可控。当控制拓扑切换时,文献[14]给出了领航跟随的编队控制的能控性所需要的条件,这也是近年来该方法的一个发展方向。还有许多从不同角度对该方法的研究。例如,当智能体的控制输入被强制要求满足一定条件时的领航跟随法控制策略,视线受限条件下的领航跟随法的编队跟踪控制方法,以及领航跟随法的多刚体姿态控制等问题[15-16]。
领航跟随法的主要优点是有较强的扩展性,节约成本,简单易行。同时领航跟随法也存在一些不足,主要体现在编队的鲁棒性十分依赖领航者的鲁棒性,很难达到预期效果。
1.2.2 基于行为法
基于行为法是基于多无人车系统的底层运动控制,上层决策系统对多无人车的行为进行设计,并通过这些基本行为进行组合来实现编队控制[17-19]。
基于行为法简单来说是无人车收到外界环境刺激,分析该信息后输出反应向量。引入行为选择模块的概念,做出相应的处理结果。确定行为选择机制是该方法的重中之重,目前的行为选择机制主要有行为抑制法、加权平均法、模糊逻辑法等。
1999年,美国杜克大学Reif团队通过研究发现如果一个完整的无人车编队系统中的某一个无人车出现损坏则整个系统接收到的信息會受到很大的影响,针对这类问题其团队提出了一种新颖的方法,运用类比于行为的电势场方法,补全了系统中缺失的信息[20]。
2012年,宋运忠教授在河南理工大学的团队提出了为实现多智能体系统的构型控制,针对二阶多智能体系统采用了一种基于智能体行为的控制算法,考虑到智能体的驶向目标行为和构型维持行为,有效实现智能体相对于期望目标的构型控制[21]。
其优点是不管环境多么复杂,都能够快速得出控制结论。该方法的另一个优点是可以实现分布式控制[22]。其缺点是在多种行为中难以选择较为容易进行建模的行为。另外在融合各个行为时不确定是否存在不相融的情况,行为越多,环境越复杂,融合后的方法就越难满足各个条件。
1.2.3 虚拟结构法
M.Anthony Lewis 首先提出了虚拟结构法,其基本思想是将无人车团体的队形看作是一个刚体的虚拟结构,每个无人车是虚拟结构上相对固定的一点[23-25]。通过双向控制了解每一个无人车的位置,通过各个层面的轨迹再把其方向和位置进行细微的调整。之后跟每一个固定的点匹配,并循环得到结果。
2004年,美国加州大学的任伟团队着重研究了运动中产生的扰动带来的影响,通过引入常见的反馈控制并且加入分散控制解决了缺乏局部控制的缺点[26]。
2009年,Broek等针对非完整约束的单轮机器人设计了虚拟结构法的控制律,通过引入智能体间的交互耦合提高了编队对扰动的鲁棒性[27]。
2019年,浙江工业大学的刘安东团队提出了基于虚拟结构法的多移动机器人分布式预测控制,通过将变换矩阵与虚拟结构相结合可以改善编队结构的靈活性从而有效拓展该方法的应用范围[28]。
总而言之,这类方法的优点是跟踪轨迹的精度高易于观察;每一个功能之间的界限不明确,不用设计高难度的通信。其缺点是队形单一难以运用到更多的领域[29]。
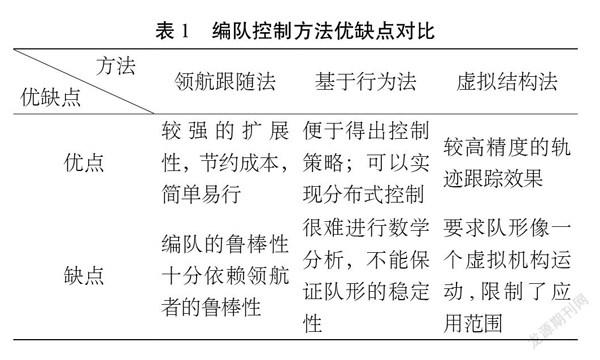
1.3 编队控制方法优缺点比较
为了更直观地比较领航跟随法、基于行为法、虚拟结构法的优缺点,便于在不同的特定情况下选用更加合适的编队控制的方法,进行编队控制方法对比如表1所示。
2 编队控制发展趋势
编队控制方法发展至今天,其中一种研究思路是把各类方法的优点融合在一起的改进算法,试图克服上述各类方法的缺点。例如,文献[30]提出了一种方法包含领航跟随法、基于行为法和虚拟结构法来解决无人车编队控制问题。
因为将任务目标作为导向的三种方法:领航法、行为法和虚拟结构法,其研究的重点是多辆无人车(小规模)的实际任务编队策略,所以一定程度上加大了得到系统完整编队控制方案的难度。随着自动化与人工智能的高速发展,单无人车的自动化与智能化程度大幅提升,使得编队控制进入一个新的领域即控制无人车之间的信息交互相互合作来达到任务目标,这样提高了任务完成度,并更加节省时间,大大提高了效率。编队控制的另一种表现形式是以单无人车为对象,依靠与其他车辆信息交互,实现较为高级的协同编队任务,这样虽然会增加车体数量,但也完成了更加复杂的任务。
在实际应用中,新编队策略有着效率高、规模大、成本低的优点。相较传统编队方法,有着更高的协同性和自由度。
3 结论
综上所述,在了解无人车编队控制研究的国内外现状和未来的发展前景后,更加明确其在时代科技发展中是极其重要的一环,无人车编队控制研究也会是未来重点科研发展方向,研究无人车编队控制在科技发展各个领域都有极其深远的意义。
参考文献
[1]王跃,谭民,景奉永,等.多机器人协调操作大型物体的运动学分析及应用[J].机器人,2002(5): 451-455.
[2]蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[3]徐东.多机器人系统的关键技术研究[J].应用科技,
2004(7):37-39.
[4]谭民,王硕,曹志强.多机器人系统[M].北京:清华大学出版社,2005.
[5]原魁,李园,房立新.多移动机器人系统研究发展近况[J].自动化学报,2007(8):786-794.
[6]石桂芬.多移动机器人编队容错控制与稳定性研究[D].武汉:华中科技大学,2004.
[7]Lin Z,Ding W,Yan G,et al.Leader-follower formationvia complex Laplacia[J].Automatica,2013(6):1900-1906.
[8]J.Lu,F.Chen,G.Chen.Nonsmooth leaderfollowing formation control of nonidentical multiagent systems with directed communication topologies[J].Automatica,2016(64): 112-120.
[9]张立威. 基于领航跟随法的无人车跟随控制方法研究[D].北京:北京交通大学,2018.
[10]Nageli T,Conte C,Domahidi A.Environment independent formation flight for micro aerial vehicles[C].IEEE International Conference on Intelligent Robots and Systems.Chicago: IEEE Press,2014:1141-1146.
[11]李润梅,张立威,王剑.基于时变间距和相对角度的无人车跟随控制方法研究[J].自动化学报,2018(11):2031-2040.
[12]Hogg R,Rankin A,Roumeliotis S,et al.Algorithms and sensors for small robot path following[C].Proc of the 2002IEEE Int Conf on Robotics & Automation.Washington DC,2002:3850-3857.
[13]Ji Z,Wang Z,Lin H,et al.Interconnection topologies for multi-agent coordination under leader-follower framework[J]. Automatica,20095(12): 2857-2863.
[14]Liu B,Chu T,Wang L,et al.Controllability of a leader-follower dynamic network with switching topology[J].IEEE Trans on Automatic Control,2008(4):1009-1013.
[15]Consolini L,Morbidi F,Prattichizzo D,et al.Leader-follower formation control of nonholonomic mobile robots with input constraints[J].Automatica,2008(5):1343-1349.
[16]Dimarogonasa D,Tsiotrasb P,Kyriakopoulosc K.Leader-follower cooperative attitude control of multiple rigid bodies[J].Systems & Control Letters,2009(6):429-435.
[17]Reynolds C.Flocks,herds,and schools:A distributed behavioral model[J].Computer Graphics,1987(4):25-34.
[18]Hu Z,Ma C,Zhang L,et al.Formation Control of Impul-sive Networked Autonomous Underwater Vehicles Under Fixed and Switching Topologies[J].Neurocomputing,2015(1):291-298.
[19]Ni J,Yang S X.Bioinspired Neural Network for Real-time Cooperative Hunting by Multi-robots in Unknown Environments[J].IEEE Transactions on Neural Networks,2011(22):2062-2077.
[20]Reif J H,Wang H.Social potential fields:A distributedbehavioral control for autonomous robots[J].Robotics and Autonomous Systems,1999(27):171-194.
[21]宋運忠,杨飞飞,基于行为法多智能体系统构形控制研究[J].控制工程,2012(4):687-690.
[22]Shin J,Kim S,Suk J.Development of robust flocking control law for multiple UAVs using behavioral decentralized method[J].Journal of the Korean Society for Aeronautical and Space Sciences,2015(10) :859-867.
[23]Lewis M A,Tan K H. High Recision Formation Control of Mobile Robots Using Virtual Structures[J].Autonomous Robots,1997(4): 387-403.
[24]C.Ma,Q.S.Zheng.Distributed formation control of 6dof autonomous underwater vehicles networked by sampleddata information under directed topology[J].Neurocomputing, 2015(22):3340.
[25]Olfati-Saber R,Murray RM.Consensus problems in networks of agents with switching topology and time-delays.IEEE Trans Au-tom Control,2004(9):1520.
[26]Ren Wei,Beard R.Formation feedback control for multiple spacecraft via virtual structures[J].IET Control Theory and Applications,2004(3):357-368.
[27]Broek T,Wouw N,Nijmeijer H. Formation control of unicycle mobile robots:A virtual structure approach[C].Proc of the Joint 48th IEEE Conf on Decision and Control and 28th Chinese Control Conference. Shanghai,2009:8328-8333.
[28]刘安东,秦冬冬.基于虚拟结构法的多移动机器人分布式预测控制[J].控制与决策,2021(5):1273-1280.
[29]Lewis R,Tan K. High precision formation control of mobile robots using virtual structures[J]. Autonomous Robots, 1997(4):387-403.
[30]Beard R,Lawton J,Hadaegh F.A coordination architecture for spacecraft formation control[J].IEEE Trans on Control Systems Technology,2001(6):777-790.