高速磁浮道岔控制系统的设计与研究
2022-02-28 22:39张田刘喻声陈昕
交通科技与管理 2022年3期
关键词:道岔
张田 刘喻声 陈昕
摘要 道岔控制系统是高速磁浮运行控制系统的重要组成部分,针对钢梁弹性弯曲道岔,通过道岔转辙过程中牵引供电状态监视、多电机协同运行、道岔位置采集,使高速磁浮道岔转辙过程遵循故障-安全原则,保障道岔转辙过程安全可靠。另外,高速磁浮道岔控制模式有一般模式、本地模式、隔离模式和省电模式,提高了高速磁浮道岔控制系统的可用性和安全性,满足道岔在正常运营和检修等不同使用条件下的控制和安全防护要求。
关键词 高速磁浮;道岔;转辙;控制模式
中图分类号 U284.5 文献标识码 A 文章编号 2096-8949(2022)03-0016-03
0 引言
高速磁浮以其速度和安全优势,成为下一代高速轨道交通的重点发展方向,得到了众多轨道交通强国的重视,中国和德国合作在我国上海建成了运营速度430 km/h的国际首条商业运营高速磁浮线,其最高试验速度达到505 km/h[1]。日本山梨磁悬浮试验线“L0系”列车实现了603 km/h的最高试验运行速度。2020年5月,时速600 km/h高速磁浮试验样车在青岛下线,标志着我国在高速磁浮技术领域实现重大突破。2021年1月,我国首台高温超导高速磁浮工程化样车及试验线在西南交通大学正式启用,设计速度为620 km/h。
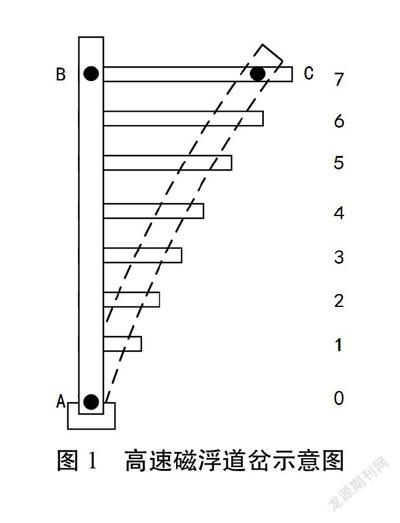
目前磁浮道岔类型主要有钢梁弹性弯曲道岔、侧壁升降道岔和多关节导轨横移道岔[2],高速磁浮多采用钢梁弹性弯曲道岔,其由轨道、道岔墩柱、移动转辙装置及其上面的圆柱锁销和阶梯锁销构成,高速磁浮道岔示意图如图1所示。不同于传统轮式轨道交通的道岔,通过转辙机搬动岔芯实现轨道变换,高速磁浮道岔系统通过转辙系统带动钢梁弹性形变将整个轨道移动至目标位置,从而实现轨道的变换[3-4]。
1 高速磁浮道岔控制系统
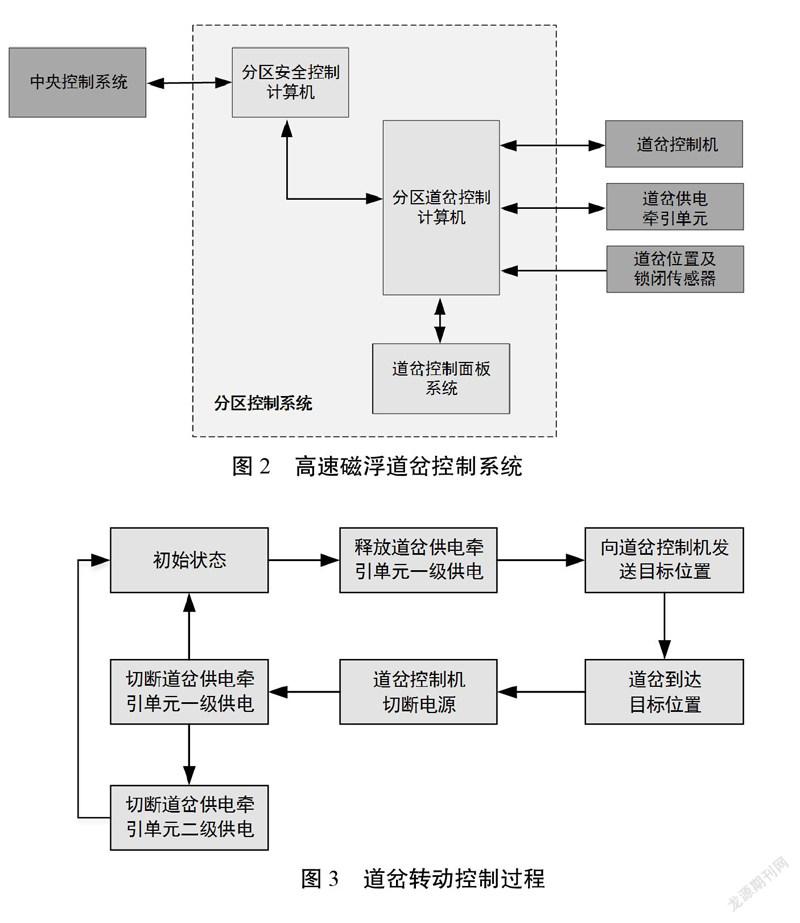
高速磁浮道岔作为磁浮线路的换线设备,其安全性和协同性至关重要,道岔控制系统是高速磁浮运控信号系统的重要组成部分。一般情况下,道岔控制命令由中央控制系统发出,分区道岔控制计算机接收分区安全计算机的道岔控制命令,执行相应的操作。高速磁浮道岔控制系统的结构图如图2所示。
高速磁浮道岔控制系統主要由四部分构成,分别是分区道岔控制计算机、道岔控制机、道岔供电牵引单元和道岔位置及锁闭传感器。其中,分区道岔控制计算机是道岔控制系统的核心部件,负责接收分区安全控制计算机的道岔控制命令,控制道岔供电牵引单元和道岔控制机进行道岔转动,确认道岔转辙到位并锁闭,防止意外激活道岔供电牵引单元和意外道岔移动操作。分区道岔控制计算机包含控制面板,当道岔处于本地模式时,可通过控制面板控制道岔的转辙、锁闭和运行模式的转换,在确保道岔安全性的前提下,提高道岔控制系统的可用性。
高速磁浮道岔梁转辙动作由多个电动机械驱动点驱动完成,道岔控制机接收分区道岔控制计算机的道岔转辙命令,控制多个驱动点保持良好位置协同运行,保证转辙过程中道岔梁体的线形,防止道岔梁局部应力集中,影响道岔寿命及行车安全。当道岔转动到目标位置并锁闭后,分区道岔控制计算机控制道岔控制机切断电源,防止意外道岔移动操作。
分区道岔控制计算机通过对道岔供电牵引单元的供电电源控制来实现对道岔的安全防护,即使用两套安全的数字输出信号来分别启动/关闭道岔供电牵引单元的一级供电和二级供电两路电源。供电电源启动后,道岔可以移动,供电电源关闭时,道岔处在安全的状态,不能移动。
分区道岔控制计算机基于SIL4级别的二乘二取二安全计算机平台,为了确保数字输出信号及供电牵引单元执行的正确性,分区道岔控制计算机对应二路数字信号控制输出分别设有相应的状态回读信号,即构成了控制输出与状态检测输入的闭环安全接口。为了确保道岔状态的安全性,分区道岔控制计算机分别对道岔转辙的一、二级电源释放进行控制,在未得到分区道岔控制计算机授权前道岔不能得电转辙,并对一、二级电源状态进行回读以确认其实际状态。
道岔位置及锁闭传感器将道岔的实际位置及锁闭状态传输给分区道岔控制计算机,实现道岔系统端点位置的状态回读。道岔位置及锁闭传感器的信号包括道岔墩柱上的圆柱锁销、阶梯锁销和表面锁销的锁定信号,通过回读三种锁定信号,判断道岔是否在目标位置及其锁闭状态,保证道岔位置安全可靠。若回读信号错误,则道岔处于四开,分区道岔控制计算机向分区安全计算机报告错误。
高速磁浮道岔在转辙过程中,道岔控制系统通过道岔供电状态监视、多电机协同运行和道岔位置采集,确保道岔安全、可靠地转辙。道岔转辙到位后,通过锁闭道岔和切断供电牵引单元防止意外移动道岔。
2 高速磁浮道岔转辙控制
控制道岔转辙是高速磁浮道岔控制系统主要任务,相比传统轮式轨道交通道岔的转辙,钢梁弹性弯曲道岔的转辙过程步骤更多,系统更复杂,因此对道岔控制系统的要求更高。
当分区道岔控制计算机收到道岔转动命令且转辙条件允许时,首先分区道岔控制计算机依次释放道岔供电牵引单元二级供电和一级供电,待道岔供电牵引单元正常上电后,分区道岔控制计算机向道岔控制机发送目标位置命令,以触发道岔转辙。道岔控制机控制多个驱动点保持良好位置协同运行,保证转辙过程中道岔梁体的线形。道岔正常的转辙时间为30 s,分区道岔控制计算机允许在此基础上延长一次1~255 s。转辙到位后命令道岔控制机切断电源,并控制供电牵引单元切除电源供应。分区道岔控制计算机发出切断道岔供电牵引单元一级供电命令后,如未收到正确的一级供电切断反馈信号,则将关断道岔供电牵引单元二级供电,若收到一级供电切断反馈信号,则道岔转辙完成。道岔转动控制过程如图3所示。
高速磁浮道岔转辙过程遵循故障-安全原则,若道岔牵引供电单元一级供电释放失败或与道岔控制机通信断开,则立即关断牵引供电单元的一级供电。
3 高速磁浮道岔控制系统的模式设计
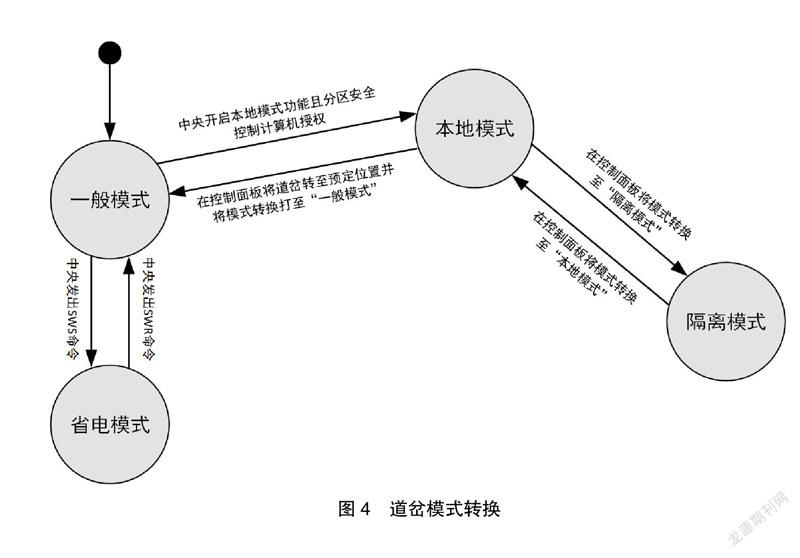
高速磁浮道岔控制系统作为运控系统的重要组成部分,需满足不同应用场景下道岔转辙和防护的安全性和可靠性,高速磁浮道岔控制系统有一般模式、本地模式、隔离模式和省电模式四种运行模式,当道岔控制系统上电启动后,道岔运行模式初始化为一般模式。
在一般模式下道岔由中央运控系统根据进路要求进行集中控制,分区道岔控制计算机只接收分区安全计算机的命令,并执行相应的道岔转辙动作。高速磁浮道岔控制模式之间的相互转换及转换条件如图4所示。
本地模式即通过分区道岔控制计算机上的控制面板控制道岔进行转辙、锁闭/解鎖和模式转换,道岔不受中央运控系统的控制,本地模式适用于道岔的故障检测和维护。一般模式下控制面板没有操作权限,分区道岔控制计算机转换至本地模式运行需要中央运行控制系统开启本地模式功能,同时分区安全计算机授权允许。在该模式下,道岔转辙仅能通过控制面板进行操作,并将道岔状态等信息回传给分区安全计算机。为保证道岔转辙过程安全,在一般模式转至本地模式时,分区道岔控制计算机在收到“请求本地授权”后,会采集控制面板上“道岔锁闭/解锁”和“道岔位置”旋钮的当前位置,并与道岔当前位置和锁闭状态进行对比,防止转换至本地模式后道岔立即转动。若位置指示和锁闭指示不一致,则不会将该次授权请求发送至分区安全计算机。
隔离模式由控制面板直接转换进入,在该模式下分区道岔控制计算机不输出任何动作命令,仅能通过道岔控制机面板或者控制器手动控制道岔,分区道岔控制计算机给分区安全计算机回送隔离状态。隔离模式适用于不需要道岔控制系统控制的场景,如道岔的检修和维护,提高道岔维护效率。
在省电模式下,分区安全计算机发送道岔移动命令。在该模式下,道岔驱动的变频器与电源断开。如果接到道岔转动命令,则迅速激活切断电源的零部件,道岔由省电模式转换至一般模式,执行道岔转动命令,此模式适合道岔不经常启动的情况,可有效节省电能。
高速磁浮道岔控制系统的模式设计综合考虑了不同应用场景下的道岔控制模式,提高了高速磁浮道岔系统的可用性、安全性和可靠性。
4 总结
道岔控制系统是高速磁浮运控系统的重要组成部分,对高速磁浮安全高效运行具有重要意义,目前,高速磁浮道岔控制系统已应用于青岛高速磁浮试验线,试验线采用钢梁弹性弯曲道岔,通过道岔牵引供电状态监视、多电机协同运行、道岔位置采集等措施保障道岔转辙安全可靠,正常情况下,道岔30 s内可完成转辙动作。高速磁浮道岔控制系统在本地模式和隔离模式下,可完成道岔基本功能的测试,提高了现场调试效率,后期可满足道岔在正常运营和检修等不同使用条件下的控制和安全防护要求。
参考文献
[1]吴卫平,胡剑,高原.高速磁浮运行控制系统与城轨信号系统CBTC的对比分析[J].控制与信息技术,2018(3):56-59+64.
[2]Park D Y,Shin B C,Han H.Korea's Urban Maglev Program[J].Proceedings of the IEEE,2009(11):1886-1891.
[3]李兴浩.高速磁浮道岔多电机协同安全控制系统设计[D].北京:北京交通大学,2019.
[4]曾国锋,袁亦竑,吉文,等.长沙中低速磁浮工程的道岔设计与调试[J].城市轨道交通研究,2016(5):44-48.
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
新视线·建筑与电力(2021年6期)2021-11-27
科学与生活(2021年21期)2021-11-10
新视线·建筑与电力(2021年3期)2021-09-10
科学与生活(2021年7期)2021-09-10
机电信息(2020年17期)2020-08-31
名城绘(2019年4期)2019-10-21
中国住宅设施(2017年6期)2018-03-07
中华建设科技(2017年9期)2017-11-04
城市建设理论研究(2014年37期)2014-12-25