面对前车制动场景的自动驾驶汽车测试参数边界研究
2022-02-28 22:39李鸿飞张诚
交通科技与管理 2022年3期
关键词:自动驾驶
李鸿飞 张诚


摘要 为缩短封闭场地测试试验周期,提高试验效率,定义了封闭场地场景极限测试用例概念,以封闭场地中前车制动场景为例,构建前车制动场景下前后车运动学模型,设计极限场景计算得到前车最大减速度,以此为阈值生成前车制动场景下的极限测试用例,并通过仿真及封闭场地测试对其进行验证。结果表明:按此方法生成的测试用例,能够代表该场景下的测试参数边界。
关键词 参数边界;前车制动;封闭场地测试;自动驾驶
中图分类号 U463.6 文献标识码 A 文章编号 2096-8949(2022)03-0093-03
0 前言
目前各大汽车厂商都在研发或推出具备L2或L3级的量产自动驾驶汽车,但L2或L3级自动驾驶汽车或多或少存在一些问题,因感知、控制不足等原因引发了多次事故。因此自动驾驶汽车在完成量产上市前,需要对车辆自动驾驶能力进行相关的测试评价,测试评价自动驾驶车辆,可以通过仿真测试、封闭场地测试、开放道路测试等方式进行。
当前研究中,大多数自动驾驶测试场景研究都针对场景及用例的生成方法,周文帅、朱宇[1]等分析数据集中样本运动参数,建立场景模型,采用蒙特卡洛法生成测试用例;修海林[2]等也使用蒙特卡洛法,生成自动驾驶组合场景及相关测试用例;夏澜[3]等基于中国大型实车路试数据库,针对危险工况进行研究,得到具有典型特征的危险场景。
根据上述研究生成的场景测试用例,数量极其庞大。而对于封闭场地测试,因场地和试验车辆限制,对被测车辆的测试往往需要串行测试。在相同测试场景下,又包含了多个不同速度节点下的不同测试用例,因此在封闭场地中完成被测车辆的测试评价,需要大量的时间和人力成本。该文以自动驾驶汽车测试中常见的前车制动场景为例,通过确定该场景下的理论计算边界,对现有测试场景的测试用例数量进行压缩,达到缩短封闭场地测试试验周期的目的。
该文重点对自动驾驶测试中前车制动场景的测试边界参数进行研究:建立前车制动场景车辆运动模型,利用模型分析并计算得到极限避撞参数,最后通过试验验证边界参数的合理性。
1 自动驾驶测试场景及用例
1.1 自动驾驶测试场景概念
自动驾驶产品在开发过程中有三个阶段:概念阶段、系统开发阶段和测试阶段。随着产品阶段的发展,产品的定义逐渐明确,产品的安全性指标的取值范围越来越小,测试场景的抽象程度不断降低。通过比较这三个阶段的不同场景的抽象程度,将场景分为三个级别:功能场景、逻辑场景、具体场景。
功能场景是场景中最抽象的阶段。在概念阶段功能场景用来进行项目定义、危害分析和风险评估。功能场景是语义级别的操作场景,通过语言场景符号来描述實体和实体之间的关系。场景的表达形式应该是一致的,用来描述场景的词汇应该是定义好的专用术语,可以来源于实际的标准和法规,场景的细节内容取决于实际的开发阶段。
逻辑场景是基于状态空间变量对功能场景的进一步描述。通过状态空间描述两个实体之间的关系,例如本车和前车。逻辑场景可以用于在项目开发阶段生成需求。由于逻辑场景通过状态空间来描述实体和实体之间的关系,因此需要对状态空间的参数范围进行确定,此时一般采用概率分布的方式,通过收集到的信息来确定状态空间的参数范围,不同参数之间的关系可以通过一定的公式或数值来确定。因此逻辑场景包括了能够场景中能满足解决问题需求的所有要素。
测试阶段,为了生成测试用例的输入数据,必须从逻辑场景中的连续参数范围中选择离散参数值,通过不同的测试方法(如模拟或场地测试),确定用于执行基于场景的测试用例所需的所有参数,形成具体场景。具体场景作为被测系统的一致输入参数,用于验证系统功能。
1.2 自动驾驶测试用例
在自动驾驶汽车测试中,场景是对真实交通环境中一类运行过程的抽象描述,测试用例是相应测试场景的可执行实例。一个完整的测试用例描述包含测试用例所属测试场景描述和测试用例要素信息。
前车制动场景中,具体场景可以描述为:试验车辆在与目标车辆保持相同速度匀速行驶状态下,目标车辆在试验车辆前方一定距离内以对应减速度进行制动,试验车辆随之减速避撞。
以试验车辆及目标车辆初始速度、目标车辆制动减速度作为该场景下参数变量,不同初始速度与目标车辆不同减速度进行组合形成制动场景下的不同测试用例。
2 制动场景参数边界研究
2.1 制动场景模型
2.1.1 制动场景逻辑模型
试验车辆(后车)制动模型,采用ALKS法规熟练驾驶员性能模型模拟车辆制动过程。该模型下,试验车辆在检测到目标车辆进行制动后,试验车辆从感知到制动避撞的过程可分为3个阶段:
(1)风险评估阶段:试验车辆根据目标车辆减速度以及两车相对距离变化判断是否应该减速的阶段,该阶段试验车辆保持匀速行驶状态。
(2)决策延迟阶段:试验车辆完成评估并开始决策的阶段,该阶段下试验车辆同样保持匀速行驶状态。
(3)减速阶段:试验车辆进行减速避撞阶段。驾驶员会逐步释放加速踏板,脚转移到制动踏板(车辆近似保持匀速行驶状态),并逐渐增大制动踏板行程直到最大(车辆开始减速)。
整个过程如图1所示。
2.1.2 制动场景数学建模
(1)试验车辆运动模型。
1)试验车辆匀速行驶模型。根据制动场景逻辑模型,试验车辆在目标车辆减速后,风险评估、决策延迟、减速制动前半部分,试验车辆在该阶段时间t1内运动状态可以看作匀速行驶运动,则有试验车辆匀速行驶距离D1为:
D1=v*t1 (1)
2)试验车辆减速制动模型。根据制动场景逻辑模型,试验车辆在减速制动制动踏板增大过程中,试验车辆减速度会在一定时间t2内,逐步达到最大制动减速度,并在最大减速度下进行制动刹停。由于减速度增加时间极短,该文将此阶段车辆运动当作以最大减速度减速制动的过程。因此可计算得到减速制动距离D2为:
D2= (2)
(2)目标车辆运动模型。前车制动场景中,目标车辆运动过程可以看作目标车辆由当前速度下按照目标减速度减速至刹停的过程。则有目标车辆运动距离D3:
D3= (3)
(3)跟车距离模型。目标车辆制动开始前,试验车辆匀速跟车阶段,试验车辆与目标车辆之间跟车距离按照试验车辆当前车速时矩THW=2 s的距离进行计算。则有跟车距离S:
S=v*THW (4)
2.2 極限测试用例计算
根据制动场景模型,以试验车辆刚好避撞为条件,则可以得到等式:
D1+D2=S+D3 (5)
代入试验车辆运动学参数,有:
v*t1+ = +v*THW (6)
其中,以匀速行驶阶段下不同速度为变量,确定在不同速度下,目标车辆制动减速度的极限,作为制动场景下的极限测试用例。
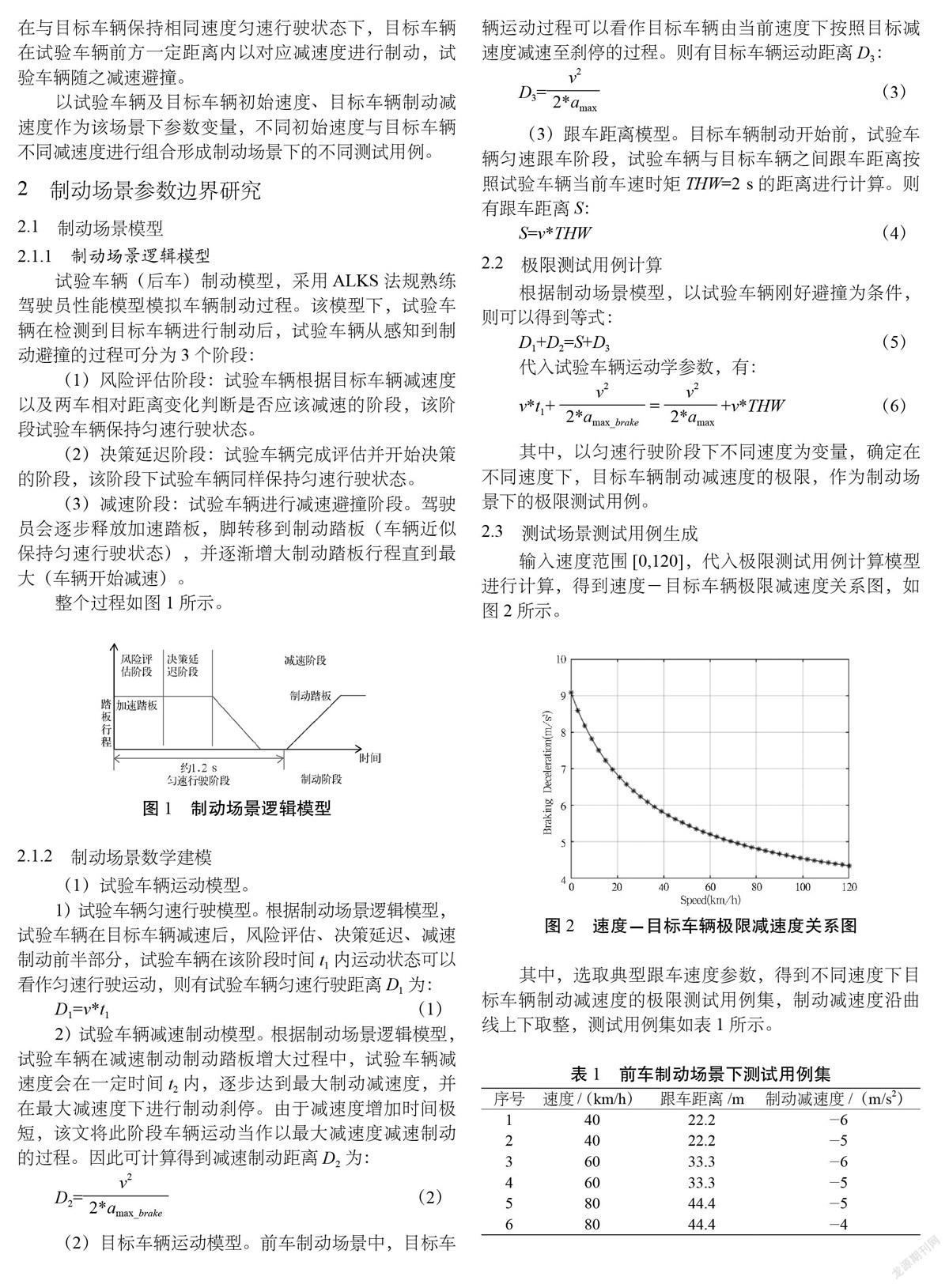
2.3 测试场景测试用例生成
输入速度范围[0,120],代入极限测试用例计算模型进行计算,得到速度-目标车辆极限减速度关系图,如图2所示。
其中,选取典型跟车速度参数,得到不同速度下目标车辆制动减速度的极限测试用例集,制动减速度沿曲线上下取整,测试用例集如表1所示。
3 试验验证及结果分析
3.1 仿真验证试验
3.1.1 试验场景搭建
使用carmaker仿真软件搭建前车制动场景,按表1中测试用例搭建相关仿真测试场景:Scenario/Road模块中搭建一条2 000 m长的单向长直道;Traffic模块按照测试用例设定前车制动相关参数及动作;Maneuver模块设定试验车辆初始速度以及驾驶员模型,使车辆按照预期跟车距离及制动反应时间进行避撞。
3.1.2 试验结果
使用test manager模块按照测试用例定义不同的稳定跟车速度、前车制动减速度以及不同速度下跟车距离,以是否碰撞为通过标准进行自动化测试。得到如图3所示测试结果。
3.2 封闭场地验证试验
3.2.1 试验场景搭建
考虑到仿真模拟过于理想,在封闭场地内进一步进行验证:
根据极限测试用例集,设计相应的封闭场地试验,测试在当前测试用例下驾驶员是否能够避免与前车发生碰撞。
试验场地选取一条双车道且车道线清晰的长直道测试跑道进行。目标车辆采用可以精确控制制动减速度的GST软目标台车。试验车辆装配一套自动驾驶机器人,能够与目标车辆进行同步并根据目标车辆运动状态保持稳定跟车状态。
试验过程中,试验车辆首先通过自动驾驶机器人精确控制车速及行进方向,保持与目标车辆的稳定跟车状态,当测试车辆与目标台车行进至试验区域时,目标车辆按照测试用例中给定的制动减速度开始制动直至静止状态。
目标车开始制动时,驾驶员可通过按下驾驶机器人接管按钮对试验车辆进行接管,并完成减速制动以尽可能避免与目标车辆碰撞。其中,按下按钮到踩制动踏板之前的阶段,可以模拟模型中匀速行驶反应的阶段。
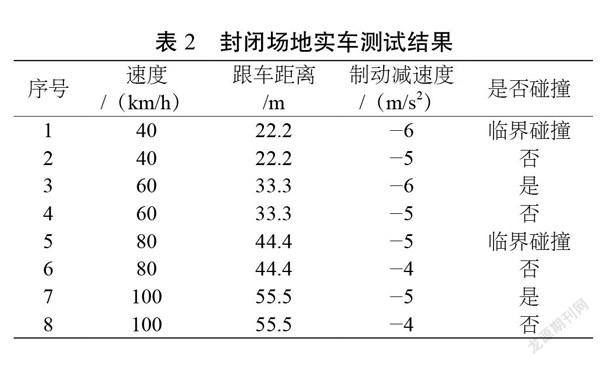
3.2.2 试验结果
依次按照测试用例表格中的测试用例进行测试,得到如表2所示结果。
3.3 试验结论
通过使用驾驶员模型仿真及优秀驾驶员封闭场地测试的形式对前车制动场景极限用例进行验证测试。根据试验结果,在不同速度跟车距离时矩THW=2 s的场景下,仿真及封闭场地测试在前车制动减速度较小测试用例下均能够避免碰撞;对于制动减速度相对较大的场景,仿真软件全部发生碰撞,封闭场地在40 km/h、80 km/h测试用例下处于临界碰撞状态,其余速度的测试用例下均发生碰撞,吻合模型得到的速度-目标车辆极限减速度曲线。
因此,根据以上分析,选取较小减速度,得到自动驾驶封闭场地测试前车制动场景下的测试用例。
4 总结
该文针对封闭场地前车制动场景,使用数学建模的方法对场景进行构建,得到该场景下速度-前车最大制动减速度曲线及测试用例,通过仿真及封闭场地测试的形式对测试用例开展试验,验证了测试用例数值的合理性。相较常规测试用例生成方法,通过参数边界筛选得到的前车制动测试用例集,数量更少且更具代表性,对简化自动驾驶封闭场地测试周期有一定的积极意义。
参考文献
[1]周文帅,朱宇,赵祥模,等.面向高速公路车辆切入场景的自动驾驶测试用例生成方法[J].汽车技术,2021(1):11-18.
[2]修海林.有条件自动驾驶汽车测试与综合评价研究[D].重庆:重庆大学,2019.
[3]夏澜,朱西产,马志雄.切入型危险工况下自动紧急制动系统的测试场景[C].Infats Proceedings of the 14th International Forum of Automotive Traffic Safety.China:湖南大学汽车车身先进设计制造国家重点实验室,2018:184-197.
猜你喜欢
南风窗(2017年23期)2017-11-23
科技创新导报(2017年26期)2017-11-08
科学与财富(2017年28期)2017-10-14
中国计算机报(2017年22期)2017-09-16
山东工业技术(2017年15期)2017-09-05
中国科技术语(2017年3期)2017-07-10
汽车周刊(2017年5期)2017-06-06
中国科技纵横(2017年4期)2017-05-16
移动通信(2016年24期)2017-03-04
家用汽车(2016年9期)2016-11-04