
基于SLIC超像素粒化的粗糙熵图像分割算法*
2022-02-28 13:56陈斌斌范九伦高梦飞
传感器与微系统 2022年2期
陈斌斌, 范九伦, 雷 博, 高梦飞
(1.西安邮电大学 通信与信息工程学院,陕西 西安 710121;2.电子信息勘验应用技术公安部重点实验室,陕西 西安 710121)
0 引 言
简单线性迭代聚类(simple linear iterative clustering,SLIC)超像素算法[1]被公认为综合性能最佳的超像素分割算法之一,基于小区域像素可以轻松转换为基于超像素粒子。SLIC超像素粒化预处理大大降低了后续图像处理的复杂性[2]。
粗糙集无须提供问题所需处理的数据集之外的任何先验知识,只是运用现有的数据集进行分析处理,能客观地描述和处理不确定的问题。文献[3]提出了粗糙集并且定义了上下近似的概念,通过目标和背景的上下近似来表示目标区域和背景区域,粗糙熵阈值化分割被首次用于图像阈值分割。文献[4]首次提出了最大粗糙熵图像阈值算法,通过选择合适大小的等窗粒子来获得理想的分割效果,该文提出的粗糙熵仅仅是在形式上采用香农信息熵,在熵取最大值时,获得图像的最佳分割阈值意义不明确。文献[5]使用最大化粗糙熵(maximum rough entropy,MRE)方法进行基于四叉树分解粒化的运动目标检测分割。文献[6]提出了一种基于MRE方法的自适应多层粗熵阈值化算法,将粗糙熵阈值法推广到多阈值情形。Sen D等人[7,8]提出了指数粗糙熵和对数粗糙熵,并用它们来测量图像的模糊性,但没有解释最佳阈值的含义。在MRE方法中,粒子大小定为图像直方图中峰值最小宽度的一半。然而,大多数情况下图像直方图不是平滑的,直方图中的峰值不能准确地表示图像中的区域。文献[9]提出了一种基于最小平方熵的粗糙熵算法,提出的最小平方熵意义明确。
本文在粒化方式上摆脱了传统不重叠等窗粒化方式,采用意义明确的最小平方粗糙熵,得到了较好的图像分割结果。仿真实验结果表明了本文算法是一种有效的图像分割算法。
1 粗糙熵的选取
SLIC超像素粒化预处理之后,用粗糙集近似表示图像粒子中的目标像素和背景像素。文献[4]中定义的粗糙熵为
(1)
式中ROT和RBT分别为目标粗糙度和背景粗糙熵度。式(1)定义的粗糙熵不满足信息熵的定义要求,取其最大值作为阈值选取准则只能看成是“比照”概率阈值法。对于图像阈值分割而言,理想的阈值点应使得目标和背景的上下近似尽可能地接近,越接近粗糙度越小,说明边界区域越小,故最佳的阈值应该选取在ROT和RBT同时靠近零处,当ROT=RBT,目标和背景的边界域相等。由式(1)得到的阈值不满足这个要求。
从文献[9]可得一种最小平方粗糙熵
FET=[(ROT)2+(RBT)2]/2
(2)
由式(2)可知,在目标粗糙度等于背景粗糙度时,即ROT=RBT=0时,FET取得最小值T*,T*取得最佳的分割阈值,位于目标与背景边界处,粗糙熵意义明确。
2 SLIC超像素粒化的粗糙熵阈值化算法
本文算法是针对灰度图像处理,只采用了SLIC超像素分割算法的亮度相似性和空间相邻性,所以需要更改其距离计算方式。对搜索到的两个像素点i和j通过亮度空间对应值和XY坐标值定义两像素点的相似度,距离计算方式(包括亮度距离和空间距离)为
(3)
式中i,j为亮度差异值。dl为亮度距离,dxy为空间距离,D为两像素之间的距离,权值m(一般取10)。
本文算法流程如下:
Step1:/*初始化聚类中心*/

Step2:/*测量像素点的相似度*/
在种子点3×3邻域内重新选择聚类中心,调节聚类中心到邻域内梯度最小种子点,防止边界点和奇异中心被设为种子点。由式(3)和式(4)计算相似度;
Step3:/*迭代更新聚类*/
for聚类中心Ckdo
为每个聚类中心周围的邻域像素点分配类标签,SLIC的搜索范围仅限于2S×2S;
end for
计算新的聚类中心;
Step4:/*粗糙熵处理初始化变量*/
用max_gray和min_gray分别表示图像的最大灰度值和最小灰度值,信息粒标签用labels_i表示,i为超像素粒子个数。max_i和min_i分别表示labels_i粒子的最大值和最小值。初始化目标背景上下近似;
Step5:/*通过阈值t遍历整个图像灰度范围,得到目标和背景上下近似*/
t的取值从min_gray到max_gray;
如果 max_i≤t,则object_lower(t)++;如果min_i≤t,则object_upper(t)++;如果t≤ min_i,则back_lower(t)++;如果t≤max_i,则back_upper(t)++。
Step6:/*求目标和背景粗糙度,粗糙熵*/
平方粗糙熵:
Step7:/*求最佳阈值*/
最佳阈值T=argmin[rough_entropy]。
3 实验结果与分析
为了比较算法的优劣,本文算法与Otsu阈值分割算法[10]、MRE算法[4]进行了比较。其中,MRE方法采用的是不重叠等窗粒化方式。
从Berkeley图库中选取了原始图像分别为合成孔径雷达(synthetic aperture radar,SAR)图、#6图,并且从OTCBVS Benchmark Dataset图库中选取了1副Img_00002图像。由于这些图像均无Ground Truth,所以,仿真实验结果参考分割(ground truth)是人工严格手动分割。
同时为了定量比较测量图像的分割效果,本文使用了下面这些指标,误分类误差(misclassification error,ME)[11],反映背景和目标像素点错分的百分比。均方误差(mean squared error,MSE)。峰值信噪比(peak signal-to-noise ratio,PSNR),代表图像分割效果失真度,PSNR值越大,失真越少。结构相似性(structural similarity,SSIM)指标[12,13],SSIM的范围为[-1,1],SSIM值越高,图像的分割质量越高。
图1为SAR图像实验结果,表1为SAR图像分割量化结果对比。可以看出,Otsu阈值分割算法与最大化粗糙熵算法都过分割。本文算法可以完整分割出目标,分割效果更好,可以有效分割河流。
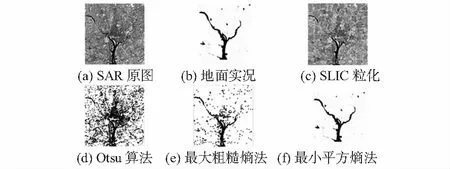
图1 SAR图像仿真实验结果
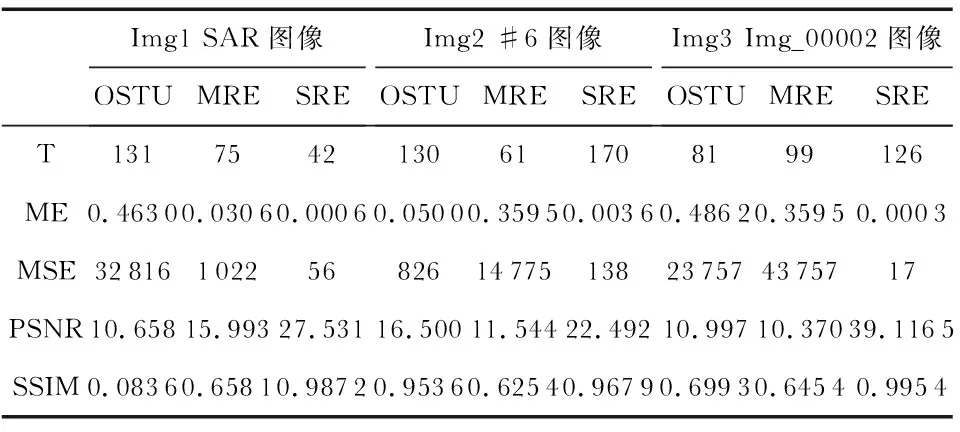
表1 分割量化结果
图2是对医学图像分割的分割结果比较,Otsu算法虽然分割效果好,但左下角轮廓断断续续,Otsu算法底部出现误分割,本文算法分割结果细节轮廓清晰。从表1量化结果可以看出本文算法分割精度更高。
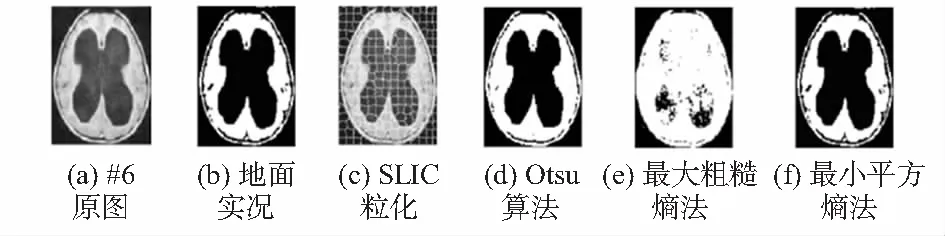
图2 #6图像仿真实验结果
图3是OTCBVS库中红外图像的分割结果,OTCBVS库有不同环境下的红外视频序列,在实验中测试了多个红外图像序列,限于篇幅,本文仅列出OTCBVS库中一幅图像。由图3结合表1表明,本文算法可以很好的分割出校园中的人物,而Otsu阈值分割算法与最大化粗糙熵算法都过分割和欠分割。
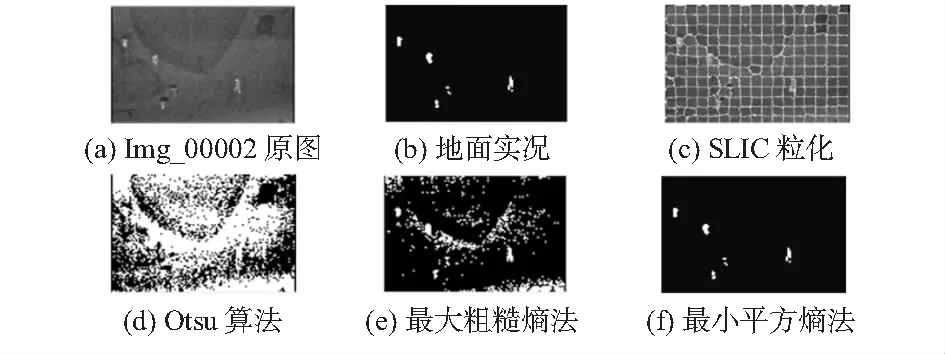
图3 Img_00002图像仿真实验结果
表1比较了图1~图3作比较算法的阈值T,ME,MSE,PSNR,SSIM的值。由图像仿真实验结果和量化结果综合对比,本文算法获得了满意的分割效果。
4 结 论
本文算法采用了一种新的粒化预处理方式,基于SLIC超像素粒化,所用的粗糙熵采用最小平方粗糙熵,意义明确。本文算法可以有效提取图像中的目标,整个算法实验结果符合期望图像阈值分割,对复杂图像分割效果好。目前为止尚未有适用于全部图像的分割方法,本文算法可作为一种图像分割算法去分割图像。鉴于本文算法仿真时需要手动调整参数m和k,本文下一步的工作任务是优化参数,建立局部粗糙度和局部灰度标准差的关系,通过最小化粗糙粒度来获得最优自适应划分粒子,实现自适应解决参数调节问题。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
农机科技推广(2022年7期)2022-08-16
建材发展导向(2021年19期)2021-12-06
中国现代中药(2021年7期)2021-09-06
空间科学学报(2020年1期)2021-01-14
临床骨科杂志(2020年1期)2020-12-12
河南农业科学(2020年7期)2020-07-22
广西农学报(2019年4期)2019-11-26
模具制造(2019年4期)2019-06-24
汽车文摘(2017年4期)2017-12-07
