感应加热CFRP温度控制算法
2022-03-01 05:14许家忠付天宇张成东
东北大学学报(自然科学版) 2022年1期
许家忠, 赵 辉, 付天宇, 张成东
(1. 哈尔滨理工大学 自动化学院, 哈尔滨 150080; 2. 哈尔滨理工大学 机械动力工程学院, 哈尔滨 150080)
碳纤维增强复合材料(carbon fiber reinforced polymer, CFRP)具有密度小、比强度高、抗疲劳、耐腐蚀等优点,在航空航天、体育器材、武器设备、风力发电、船舶、汽车上广泛使用[1-3].感应加热具有能耗低、加热温度高、加热速度快、可以局部加热、温度易控制、清洁等优点,被众多学者应用在CFRP加热固化领域[4-5].在感应加热CFRP过程中,温度场的升温历程、温度调整速度以及温度数值的准确性直接影响CFRP的成型质量,因此控制算法对于感应加热CFRP的制备至关重要.传统的比例-积分-微分(PID)控制器因其结构简单和鲁棒性能而被广泛应用于工业控制中.然而,当系统具有非线性或不确定性时(例如感应加热CFRP温度控制系统),固定增益的PID控制器显示出局限性.
控制器的性能对参数的调谐[6-7]有很大的依赖性.学者们已经提出了几种方法来寻找合适的控制器参数集,如齐格勒-尼科尔斯方法[8]、蚁群优化算法[9-10]和神经网络法[11].但是感应加热系统模型总是随着环境、感应线圈以及目标工件而变化.因此,神经网络没有用于预训练的数据集.在文献[6,12-13]中发现,嵌入了PID控制器结构和结合了FIS的人类专家知识的模糊PID控制器具有卓越的控制性能.Soyguder 等[14]提出了一种自适应模糊PID控制器,结合暖通系统中温度误差和误差的变化量在线自适应调整PID参数,具有最小的设置时间并且没有稳态误差.Chang等[15]对所有的量化因子进行了深入的分析,并设计了一个自校正模块,使用有限元分析对自校正模糊逻辑控制器的控制能力进行了仿真,并在感应加热系统上进行了实验,验证了所提方法的有效性.Chowdhury 等[16]针对预热回收系统提出了模糊自矫正PID控制器,测试了在稳态和瞬态热两种情况下的设定点跟踪和干扰抑制能力,发现模糊自校正PID控制器大大减少了计算时间,显著提高了控制性能.
Wang 等[17]提出了一种基于变论域模糊控制器的感应加热系统的温度控制方法,仿真结果表明该温度控制系统的有效性和优越性.上述的研究已经证明了模糊PID在温度控制系统中的有效性,但是对于感应加热CFRP这种速热系统,准确的数学模型和温度控制系统的鲁棒性是十分重要的.
本文以COMSOL为平台,对双线圈感应加热CFRP温度控制系统进行温度场分析计算,采集感应加热系统从初态到稳态的温度输出数据;并利用粒子群算法对感应加热CFRP系统进行系统数学模型辨识;通过比较模型与实际系统的输出,验证了所辨识的数学模型精确度;在精确的数学模型基础上,采用了改进的粒子群优化算法对模糊PID进行参数优化,同时对比了PID,Fuzzy-PID在动态性能、自适应等方面的优劣.
1 基于粒子群算法的系统辨识


图1 动态系统辨识Fig.1 Dynamic system identification
在感应加热CFRP温度系统辨识过程中,系统模型结构的选择直接影响到最终辨识结果模型的精度.因此在确定模型结构之前,需要通过先验知识(如非线性程度、时间常数、纯滞后环节等)作为模型选择的指导,并以此为基础来提高模型的精度.在感应加热CFRP温度控制系统中传递函数最常用的数学模型如下:
(1)
其中:G(s)为系统传递函数;K1为惯性增益;T1为惯性时间常数;τ为滞后时间常数;n为系统的阶数,s为时域标志.
以COMSOL为有限元仿真平台,建立双线圈感应加热CFRP有限元模型.文献[18]已经证明此有限元仿真的准确性,见图2.每隔0.5 s采集一次温度数据,共计3 000个数据.利用PSO算法对感应加热CFRP温度系统模型参数在给定范围内反复地寻优,使得由模型计算得到的数值结果能最好地拟合采样数据.所得的双温区传递函数如式(2)所示[19-20],图3为感应加热系统辨识曲线.
(2)
2 改进的粒子群模糊PID算法
2.1 Fuzzy-PID
PID控制算法是连续系统中技术最为成熟、应用最为广泛的一种控制算法.PID控制器的传递函数有以下形式:
Gc(s)=Kp(1+1/Tis+Tds) .
(3)
式中:Kp是比例增益;Ti和Td分别是积分和微分时间常数.本文使用的PID控制的离散时间等效表达式如下:
(4)
其中:u(tk)是第k次采样时间的输出;tk是第k次采样时间步长;e(k)是输入与输出之间的误差;Kp,Ki,Kd分别是比例增益、积分增益和微分增益.

图2 有限元模型建立及验证Fig.2 Establishment and verification of finite element model

图3 感应加热系统辨识曲线Fig.3 Identification curve of induction heating system
感应加热CFRP温控系统的模糊PID控制系统如图4所示.

图4 模糊PID原理图Fig.4 Fuzzy PID schematic diagram
图中模糊系统输入语言变量e(k)和误差变化量Δe(k),输出语言变量ΔKp,ΔKi,ΔKd.为了方便,将ΔKp和ΔKd通过归一化线性变换到[0,1],积分时间常数参照微分时间常数确定:Ti=αTd,用于计算ΔKi.
参数整定的模糊规则可以按以下方式表示:
Ife(k) isMiand Δe(k) isNi,then ΔKpisHi, ΔKdisJiandα=αi,i=1,2,3,…,m.
其中:Mi,Ni,Hi和Ji代表对应的模糊集;αi是常数;e(k),Δe(k)选择高斯形状隶属函数,如图5所示, NB,NM,NS,ZO,PS,PM,PB分别代表负大、负中、负小、零、正小、正中、正大.

图5 e(k)和Δe(k)隶属度函数Fig.5 Membership function of e(k) and Δe(k)

Ife(k) is NB and Δe(k) is NS,
then ΔKpis big,ΔKdis small andα=4.
以此类推,系统采用Mamdani法进行模糊推理,模糊PID控制器有7个语言术语,其中使用了49个规则,ΔKp和ΔKd模糊规则见表1,参数关系见图6.
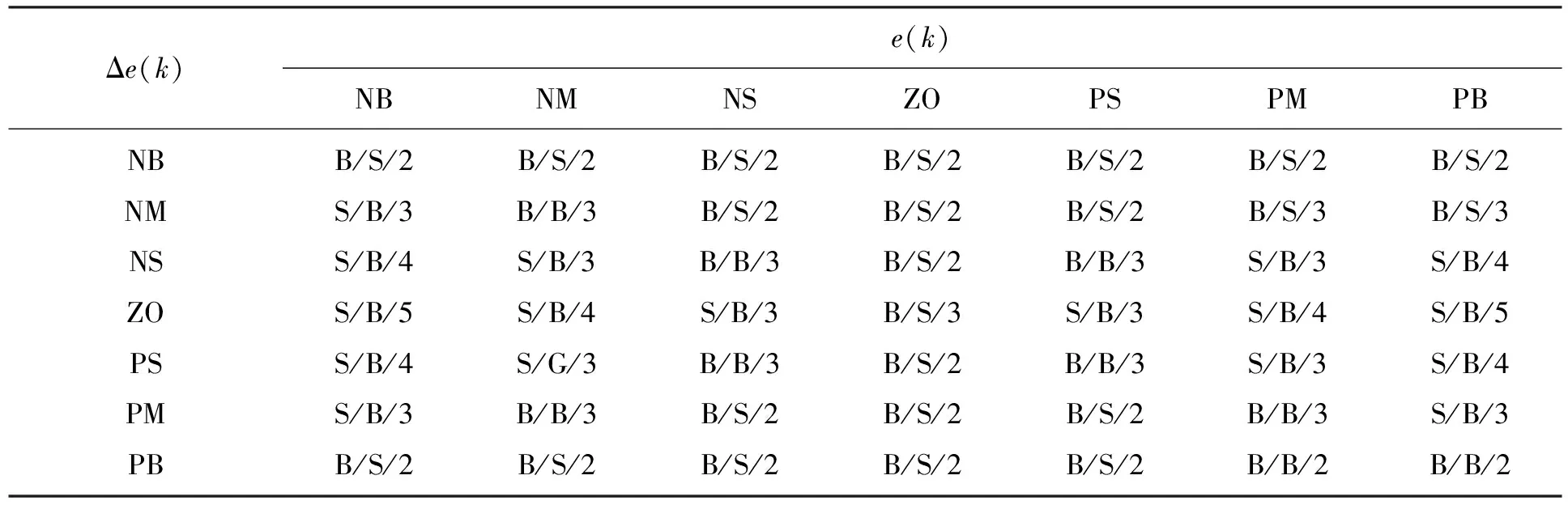
表1 ΔKp和ΔKd模糊规则

图6 ΔKp和ΔKd表面示意图Fig.6 Surface schematic representations for ΔKp and ΔKd
第i条规则的隶属度μi由式(5)确定:
μi=μAi(e(k))·μBi(Δe(k)) .
(5)
式中:μAi是误差e(k)模糊集合Ai的隶属度;μBi是误差变化量Δe(k)模糊集合Bi的隶属度.图6中的隶属度函数满足:
(6)
然后,去模糊化则可以使用式(7):
(7)
式中,ΔKp,i与ΔKd,i分别对应于第i条规则中隶属度μi对应的Kp和Kd的值.采用重心法去模糊化,虽然计算量更大,但是防止了快速变化,保证了控制面的平滑和连续.
2.2 改进粒子群优化的模糊PID
传统的模糊PID控制器,偏差量化因子、偏差变化量化因子、PID参数等都是人为选择的,依赖于经验知识和模拟调试的参数,可能无法达到预期的效果.因此,采用改进的粒子群优化算法对模糊PID进行优化.这是一个实现系统最优控制的优化过程.对于感应加热CFRP温度控制系统,改进的粒子群优化算法优化了PID控制器中的参数Kp,Ki,Kd.IPF-PID控制器的系统结构如图7所示,其中Ke,Kec是误差和误差变化量的增益.
IPF-PID控制过程由粒子群生成、适应度函数、位置和速度更新以及最终终止准则5个步骤组成.流程示意图见图8.
步骤1 初始化粒子群的随机位置xi和速度vi.给定粒子数M=100和空间维数N=3,迭代次数100,惯性因子ω∈[0.4,0.9]并在范围上线性变化,学习因子c1,c2∈[0,3].变异概率pm∈[0.001,0.4],交叉概率pc∈[0.9,0.97].


图7 IPF-PID控制原理图Fig.7 Control schematic diagram for IPF-PID
步骤3 粒子在每次迭代中更新个体极值pbest和全局极值gbest.当更新个体极值时,将第i个粒子的当前适应值f(Xi)与该粒子经历的个体极值pbest的适应值进行比较.如果前者更好,那么更新f(Xi),否则保持f(Xi)不变.更新全局极值与个体极值操作方式一样.
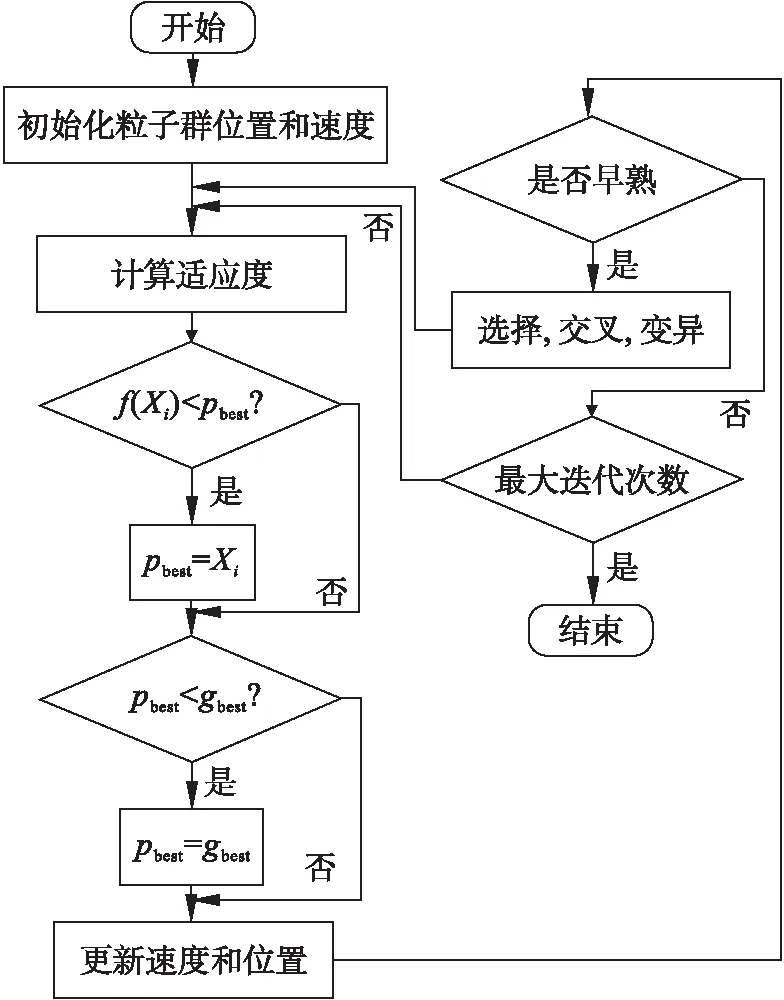
图8 改进粒子群优化流程图Fig.8 Flow chart of improved particle swarm optimization
步骤4 更新粒子的速度和位置.当更新当前速度和位置时,通过式(8)和式(9)更新每个粒子的速度和位置.如果粒子越界,则在指定范围内随机产生新的位置和速度来替换当前位置和速度.
(8)
(9)

步骤5 如果粒子群优化过程中出现过早收敛于局部最优时,调用遗传算法进行交叉操作,重新返回步骤2计算粒子适应度;否则,判断迭代次数是否达到100,如果达到,新的gbest被认为是最优的PID控制器参数.否则,循环到步骤2,直到达到最大迭代次数.
3 仿真分析
在本研究中针对一个温区,利用Matlab/Simulink作为仿真平台建立感应加热CFRP温度控制系统的控制模型.利用IPF-PID算法将需要优化的参数输入到模糊PID控制器仿真模型中,并绘制适应度值和各参数变化曲线,如图9所示.从图中可以看出,Kp,Ki,Kd在适应度值较大时变化较剧烈,在适应度减小时趋于稳定.证明了改进的粒子群算法具有较好的自适应能力和抗干扰特性.伴随温度的变化,PID参数会自动调整.
从图10中可以看到针对感应加热CFRP系统,三种算法最后都能达到稳定控制.其中IPF-PID控制器的系统呈现最小的上升时间、最小的超调量、最短的调节时间和稳态误差;而PID控制系统和Fuzzy-PID控制系统响应时间长、超调大、系统调整过渡过程时间较长.可见IPF-PID控制性能显著提高,超调量小,调节时间更短,动态性能更好.
为了评估IPF-PID在感应加热CFRP系统中的鲁棒性和自适应性,每隔200 s插入一个80%参考值的干扰信号,如图10b所示.IPF-PID模型稳定性和抗干扰性最佳,即在施加干扰信号后,控制器能够保持系统稳定的运行,在参考值小范围的振荡,能快速恢复到稳定状态.传统的PID控制器在每次干扰施加点上都会在参考值上下出现较大波动,其控制性能最差;而Fuzzy-PID的控制效果居中.证明IPF-PID对对象参数的突然干扰具有很好的抑制效果.
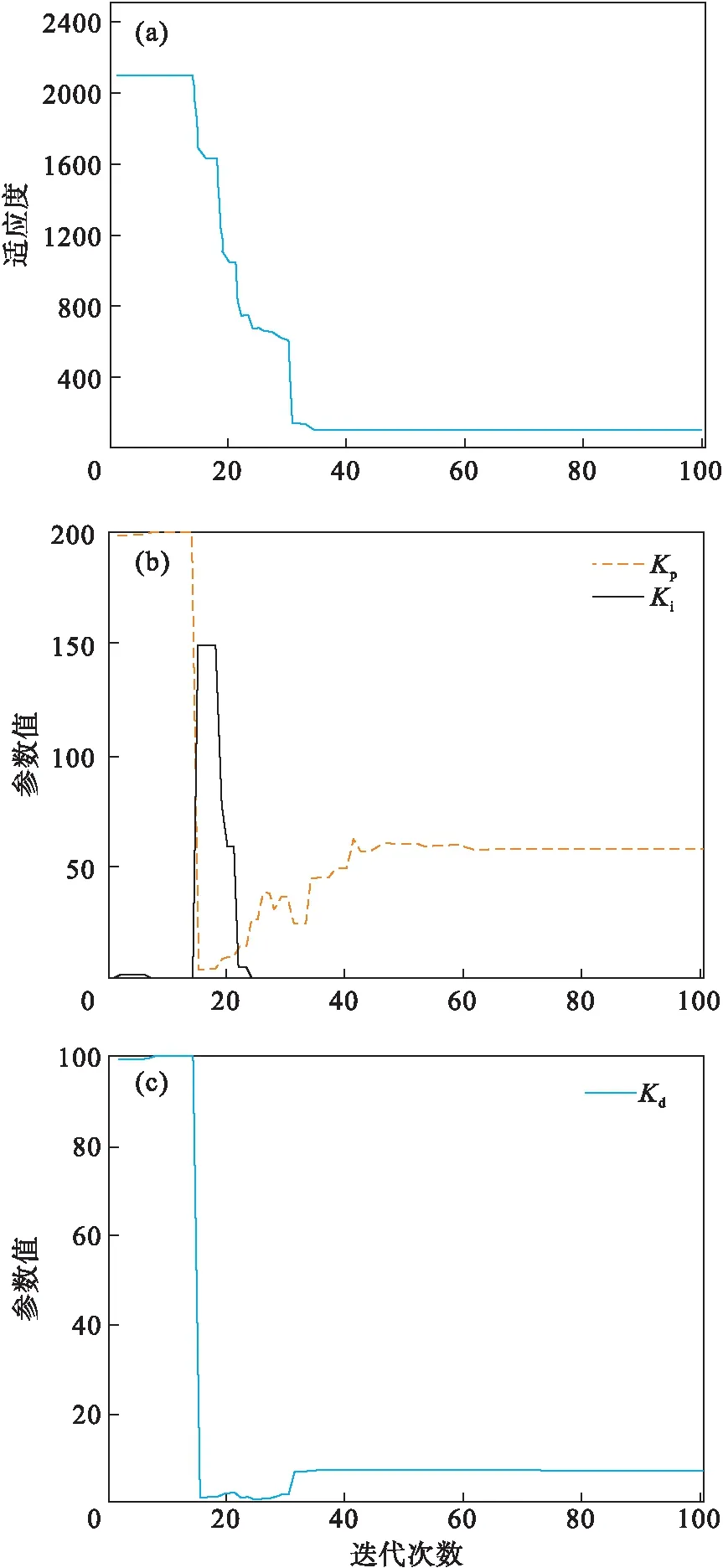
图9 参数值和适应度值随迭代次数变化曲线Fig.9 Values of parameters and fitness (a)—适应度值; (b)—Kp和Ki优化曲线; (c)—Kd优化曲线.

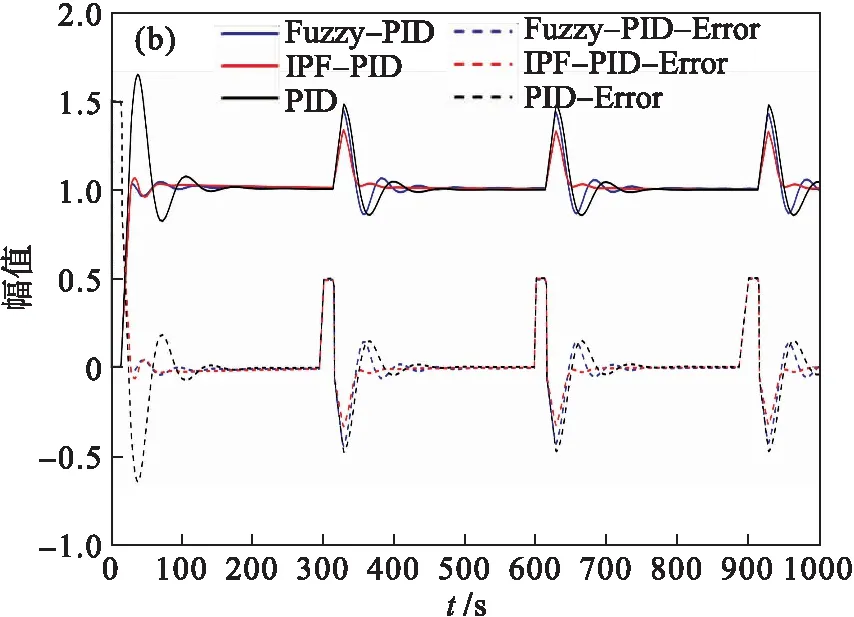
图10 三种算法的自适应性Fig.10 Adaptability of three algorithms (a)—无干扰信号的阶跃响应; (b)—有干扰信号的阶跃响应.
4 实验验证
为了验证所提算法的效果,对感应加热CFRP进行了实验验证.图11中ADC采用的是8位的ADC0809模数转换器,处理器采用数字电源专用DSP芯片,温度传感器输出为4~20 mA,对应温度范围为0~300 ℃,感应加热电源采用可编程的HR-5000,CFRP的尺寸为300 mm×300 mm×1.5 mm,环境温度为20 ℃,感应加热线圈由利兹线制成,以减少集肤效应和邻近效应.
图12为所提出的系统在三种算法作用下的升温曲线,从图中可以看出,传统PID算法在感应加热系统中的控制效果并不理想,始终沿着设定的温度数值大幅度的波动.而IPF-PID的曲线尽管也有浮动,但其上下浮动的数值均在误差允许范围内,具有较好的控制效果,且此算法具有较小的调节时间, 在实际生产中能极大地缩短加热时间.实验结果和模拟结果吻合得较好,证实了所提出的IPF-PID算法在感应加热系统中的适用性和有效性.


图11 电磁感应加热CFRP实验Fig.11 Induction heating CFRP experiment (a)—实验示意框图; (b)—实验系统.

图12 三种算法升温历程曲线Fig.12 Three algorithms heating history curves
5 结 论
1) 本文利用PSO算法对感应加热CFRP温度控制进行数学模型辨识,把IAE指标当作评判误差大小的指标.并比较模型输出与实际输出的拟合曲线,确定PSO算法能够精确地辨识出数学模型的具体参数.
2) 通过对PID,Fuzzy-PID和IPF-PID三种算法的仿真结果对比分析,得到IPF-PID控制器具有良好的性能,获得最小的超调量、最短的上升时间和最小的调节时间.通过实验验证此算法的效果,结果表明模拟结果和实验具有高度的吻合性.
3) 在感应加热CFRP系统中插入扰动信号,系统没有失去稳定性,而是在参考点周围呈现小的振荡,提高了系统的自适应性和跟踪精度.证明了该控制器对外部干扰的容错性.
猜你喜欢
计算机仿真(2022年8期)2022-09-28
昆明医科大学学报(2022年1期)2022-02-28
煤气与热力(2021年12期)2022-01-19
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
电子制作(2019年13期)2020-01-14
当代旅游(2016年10期)2017-04-17
飞碟探索(2015年8期)2015-10-15
财经理论与实践(2015年2期)2015-04-16
筑路机械与施工机械化(2014年4期)2014-03-01