无人机辅助空地协同无定形组网仿真评估*
2022-03-03 08:57林尚静1锦2冀2琲1肖志勇
电讯技术 2022年2期
林尚静1,田 锦2,马 冀2,庄 琲1,肖志勇
(1.北京邮电大学 电子工程学院,北京 100876;2.金陵科技学院 网络与通信工程学院,南京 211169;3.武汉烽火技术服务有限公司,武汉 430205)
0 引 言
随着近期无人机(Unmanned Aircraft Vehicle,UAV)在通信载荷性能、载荷挂载能力及续航时间等方面的飞速发展和提升,具备无线回程能力的可移动无人机节点因其能够利用阻挡较少、链路质量较好的空地无线视距通信链路资源,并且具有灵活的动态可控部署能力,成为为未来无线网络提供空间针对性服务的重要补充方式[1-3]。由于可移动无人机节点的引入,传统由地面固定蜂窝基站所构成的固定蜂窝状网络形态逐步呈现出一种随着无人机节点的悬停位置可动态变化的无定形形态。
目前,通信网络正在从蜂窝化组网向无定形组网演进。国内外学者和研究机构提出了超蜂窝,液体小区、弹性小区、虚拟小区以及幻影小区等无定形网络架构。
2012年,日本NTT DoCoMo公司提出在现有宏蜂窝上重叠配置多种小型蜂窝的幻影小区(Phantom Cell)架构,通过同一蜂窝小区收发控制信号(控制平面)与用户数据(数据平面)分离,采用低频带、覆盖区域大的宏蜂窝用于控制平面,使用高频率大低功率的小小区蜂窝负责用户平面[4-5]。
2013年,诺基亚西门子通信在美国无线通信展上推出了动态无线电(Liquid Radio)的网络架构,能够根据用户需求共享和重新分配网络容量,可为最需要的地区分配移动宽带容量[6-7]。
2014年,爱立信与SK电讯联合展示了弹性小区(Elastic Cell)技术[8]。该技术在秉承CoMP规范的基础之上引入软切换概念,实现了每个用户在同一时间内与多个基站保持通信。
2015年,清华大学提出超级小区(Super Cell)技术。该技术通过蜂窝虚拟化,降低大量相邻小区基站参考信号重叠时产生的干扰[9]。
然而,现有的无定形组网技术其组网仍然是依靠地面上固定部署的各种形态的蜂窝基站(宏蜂窝、微蜂窝、微微蜂窝、毫微微蜂窝以及密集小蜂窝)之间的协同,其灵活性受限于地面基站的物理部署位置,因此需要研究更为灵活的无定形组网技术。
本文提出了基于“控制覆盖与业务覆盖解耦”“上行传输和下行传输解耦”的空地协同无定形组网架构,搭建了系统级仿真平台,通过仿真数据以及语音业务论证了空地协同组网能够提升用户的业务体验。
1 空地协同无定形组网架构
1.1 控制覆盖与业务覆盖解耦
传统4G以及4G之前的蜂窝网络控制覆盖与业务覆盖是紧耦合的,用户的控制平面连接和数据平面连接都是由同一个蜂窝基站负责。然而,控制连接通常是非并发、低速率的,而业务连接是并发、高速率的。
5G网络提出了双连接技术,用户同时与宏基站和小蜂窝基站建立连接,由宏基站负责用户的控制平面连接,小蜂窝基站负责用户的数据平面连接。这样,用户在小蜂窝之间移动,可以避免频繁切换的问题[10]。
空地协同无定形组网是在现有5G控制连接和数据连接分离的基础之上,在物理空间上进行分离和优化。由地面蜂窝基站维持基本的控制平面覆盖(广播、寻呼等)以保证用户的可连通性,由无人机中继根据实际业务需求柔性地进行布置(“效率优先”)。
1.2 上行传输与下行传输解耦
传统4G以及4G之前的蜂窝网络不仅是数据与控制共址,上下行覆盖也是共址的,即基站所处小区的上行覆盖和下行覆盖完全对称。首先,用户与基站发射功率的不平衡性,导致了上下行业务的覆盖形态的不对称;其次,未来无线业务的一个突出特征就是上下行流量不对称性。因此,上下行业务的最优覆盖形态也应该是不对称的。
5G网络在逻辑层面实现了上行覆盖与下行覆盖的解耦。例如,5G提出了附加上行链路(Supplementary Uplink,SUL)技术,在小区边缘3.5 GHz上行弱覆盖的地方增开1.8 GHz低频段作为上行链路补充,从而提升5G上行覆盖[11]。此外,中国移动提出了超级上行技术,通过在上行链路以时分双工(Time Division Duplexing,TDD)使用低频频分双工(Frequency Division Duplexing,FDD载波和高频TDD载波[12]。由此可见,5G网络已经在逻辑层面实现了上行覆盖和下行覆盖的分离。
如图1所示,空地协同无定形组网允许同一个用户从不同的基站实现上行和下行的接入。例如,用户的上行业务通过无人机中继转发给地面基站(无人机中继离用户更近,能够增强用户的上行覆盖),下行业务由地面基站直接发送给用户。这样上行业务覆盖和下行业务覆盖就可以分别进行独立的优化,从而能在确保覆盖服务的前提下实现最大限度的能量节省。

图1 空地协同无定形组网架构
2 空地协同组网协议栈设计以及工作流程
2.1 空地协同协议栈设计
本文提出了一种异构无人机中继的无定形组网系统模型,其中异构中继系统指源节点、中继节点、目的节点之间采用不同的通信制式。无人机中继和地面基站之间采用的接入技术为长期演进(Long Term Evolution,LTE)系统标准协议,无人机中继与目的用户之间采用的接入技术为基于IEEE802.11n/g系列标准的协议。之所以空地协同组网不采用同构中继架构,是因为现有地面蜂窝基站通常是密集组网,而空中无人机中继是可移动的,如果无人机中继采用与地面蜂窝基站相同的通信制式,那么就相当于在地面密集蜂窝网络中引入了可移动的干扰源。因此,需要实时对可移动无人机中继进行网络部署、参数配置和性能优化,这给空地协同组网增加了复杂性。本文采用异构中继架构,无人机中继与目的用户之间的工作频段是工业、科学和医用(Industrial Scientific Medical,ISM)免授权频段,而无人机中继和地面基站之间工作频段是授权频段。因此,可移动空中无人机中继与地面蜂窝基站网络之间不存在干扰。
由于无人机中继是异构中继,因此需要在用户端实现双协议栈。通常情况下,用户端都同时支持LTE协议和IEEE802.11n/g协议,因此在硬件实现上不存在问题。但是,双协议栈之间需要通过隧道协议实现用户IP数据包的透传,因此用户端需要软件升级。通常情况下,隧道协议可以分为链路层隧道协议(L2F、PPTP、L2TP)和网络层隧道协议(VTP、IPSec、Socket等)。本文设计了基于LTE的分组数据汇聚协议(Packet Data Convergence Protocol,PDCP)层隧道,在PDCP层实现用户IP数据包的协议转换,如图2所示。具体地,在上行方向,用户的上行IP数据包,通过LTE的PDCP层隧道,然后通过IEEE802.11协议栈将IP数据包发送给无人机中继,无人机中继从IEEE802.11协议栈中将IP数据包解析出来,然后再次通过LTE协议栈发送至地面蜂窝基站;在下行方向,地面蜂窝基站通过LTE协议栈将用户数据包转发至无人机中继,无人机中继将PDCP数据包解析出来,通过PDCP层隧道,继而通过IEEE802.11协议栈转至用户。
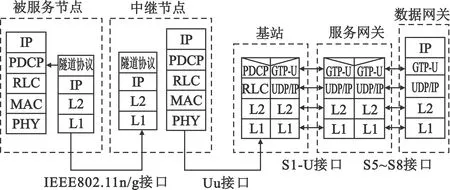
图2 基于隧道的异构无人机中继协议栈
2.2 空地协同工作流程
2.2.1 无人机中继的发现
对于用户来说,需要一定的机制来识别自身是否处在无人机中继的覆盖范围之内、当前接入无人机中继的用户数目,以及无人机与地面蜂窝基站之间信道质量信息,以辅助用户决定是否通过无人机进行数据平面的转发服务。
为了获取上述信息,一种方法是由地面蜂窝基站通过控制平面的系统广播中发送。但是,考虑到并不是所有的用户(例如,小区中心用户或者低速率业务用户)都需要无人机中继服务,地面蜂窝基站通过系统广播消息广播上述信息,将大大增加不需要无人机服务的用户周期性读取系统广播消息而产生的功耗。另一种方法是由 无人机中继以beacon帧的方式进行广播。这时需要对beacon帧进行扩展设计,在beacon帧中添加相关信息:无人机中继当前所在的小区信息、当前接入无人机中继的用户数目和无人机与地面蜂窝基站之间信道质量信息。
2.2.2 无人机中继的激活/去激活
用户应该在自身信道条件下降到一定程度后再激活无人机中继服务。如果用户的信道条件并没有降低到一定程度而过早地开启无人机中继服务,那么可能由于增加一跳中继链路引起额外的时延导致开启无人机中继后用户体验差于开启无人机中继前的体验。因此,当用户触发A2事件(当前地面蜂窝基站小区质量比门限差),用户开启异频测量。当开启异频测量后,用户开始寻找合适的无人机中继,如果 B1事件(邻小区无人机中继小区质量比门限好)发生,则地面蜂窝基站会通过信令为该用户激活无人机中继服务;如果A1事件(当前地面蜂窝基站小区质量比门限好)发生,则关闭异频测量。
用户开启无人机中继服务之后,如果B2事件(当前无人机中继小区质量比门限差,邻小区地面蜂窝基站小区质量比门限好)发生,地面蜂窝基站则会为该用户去激活无人机中继服务。
无人机中继激活/去激活的工作流程如图3所示。
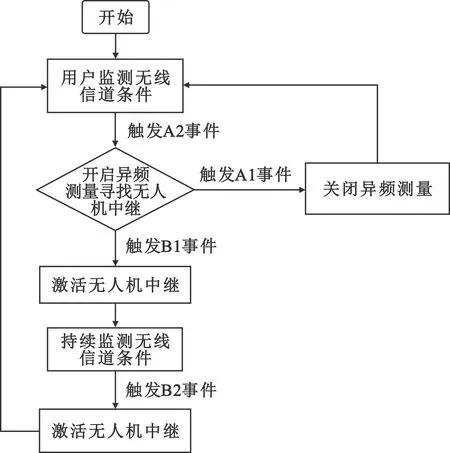
图3 无人机中继激活/去激活工作流程
2.2.3 无人机中继的重新选择
开启无人机中继服务的用户可能由于自身的移动而离开无人机中继的服务范围,因此地面蜂窝基站需要及时将离开无人机覆盖的用户移除源无人机的服务,由用户自行重新寻找新的合适无人机中继,再启动无人机中继服务。之所以需要分两步进行,是由于被服务用户处于与当前的中继用户连接状态时,无法接收其他中继用户发送的beacon帧,因而无法获得它们的信道质量,故无法选择到更好的无人机上。因此,通过在当前的中继用户信道下降到一定程度后主动断开与此中继用户的连接并扫描其他中继用户,即可实现中继用户的重新选择。
3 性能仿真
3.1 仿真平台及环境参数设置
本文搭建了系统级的仿真平台,如图4所示。仿真考虑郊区场景(小区的覆盖半径为3 km)以及市区场景(小区的覆盖半径为500 m)。
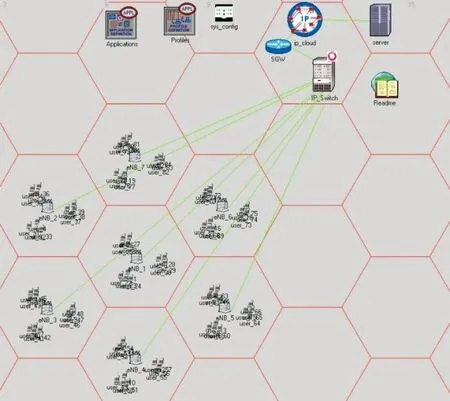
图4 系统级仿真拓扑图(受限与二维展示界面,空中无人机中继无法展现出来)
整个空地协同通信系统由7个小区组成。每个小区由1个地面宏蜂窝基站、低空3个无人机中继以及移动用户组成。受限于二维展示界面,低空无人机中继无法在图4的仿真拓扑中展现出来。无人机中继是悬停的,为其覆盖范围内无线信道质量较差的用户提供中继服务,其悬停规划不在本文讨论范围之内。移动用户在本小区范围随机游走。当移动用户的无线信道质量较差时,其按照2.2节所述的激活无人机中继服务;当移动用户无线链路质量恢复或者其移动离开无人机中继覆盖范围,其去激活无人机中继服务。
本文选取了数据类视频业务和语音类基于IP的语音传输(Voice over IP,VoIP)业务进行仿真验证,具体的系统仿真参数如表1所示。

表1 仿真参数
3.2 无人机中继激活成功率分析
空地协同无定形组网采用控制覆盖和业务覆盖分离的架构,因此用户需要先与地面蜂窝基站建立RRC信令连接之后再激活无人机中继服务,由无人机中继负责业务连接。一般认为,激活无人机中继服务的用户通常处于阴影衰落和穿透损耗较大的区域,在这一区域中用户建立RRC连接的过程本身就很容易失败,导致后续根本无法激活无人机中继服务。因此需要首先仿真评估无人机中继服务的激活成功率,结果如图5所示。

图5 在广覆盖(ISD 3 km)场景下无人机中继服务激活失败概率
在密集覆盖(ISD 500 m)场景中,无论是FDD系统还是TDD系统,在视频以及VoIP业务场景下用户都能够成功激活无人机中继服务。这是因为在密集覆盖场景下用户的无线信道质量较好,因此能够成功与地面蜂窝基站建立信令连接,并触发开启无人机中继。
随着地面蜂窝基站覆盖范围的增加,处于小区边缘的用户的无线信道质量逐渐下降。在广覆盖(ISD 3 km)场景中,在FDD配置下用户能够成功开启无人机中继,而在TDD配置下用户存在无人机中继激活失败的情况。这是因为相较FDD配置,系统在TDD配置下无线资源更加受限。处于小区边缘的用户由于自身信道质量较差而系统资源又受限,因此无法与地面蜂窝基站交互信令以激活无人机中继服务。
进一步观察在TDD配置下的仿真结果可以发现,在相同的每无人机中继服务3/6个用户场景下,视频业务场景下无人机中继激活的成功概率要低于VoIP业务场景。这是因为视频业务场景下先开启无人机中继服务的用户将消耗系统更多的无线资源,导致后续希望开启无人机中继服务的用户无法与地面蜂窝基站交互信令以激活无人机中继服务。
此外,无论是VoIP业务还是视频业务场景,随着每个无人机中继服务的用户数目的增多,无人机中继建立失败率越高。每个无人机中继服务6个用户时,无人机中继激活的成功概率小于每个无人机中继服务3个用户的情况。这是因为每个无人机中继服务的用户数越多,无人机中继前向链路以及回传链路的无线资源越紧张,导致后续希望开启无人机中继服务的用户无法与地面蜂窝基站交互信令以激活无人机中继服务。
仿真表明,在用户无线信道环境极端较差的情况下,空地协同无定形组网可能需要采用控制覆盖和业务覆盖耦合的架构(即由空中无人机中继负责用户的控制平面和业务平面),以确保用户能够正常发起业务。
3.3 无人机中继激活/去激活控制平面建立时延分析
本节继续评估空地协同无定形组网采用控制覆盖和业务覆盖分离(控制平面信令不经由无人机中继)以及控制覆盖和业务覆盖耦合(控制平面信令经由无人机中继)的架构场景下控制平面建立时延,结果如图6所示。

图6 无人机中继激活/去激活下控制平面建立时延
整体而言,无论是系统是TDD1配置模式,还是FDD配置模式,开启无人机中继之后控制平面建立时延都相较未开启无人机中继要缩短。特别地,在 TDD1配置模式,开启无人机中继之后控制平面建立时延,相较未开启无人机中继,缩短的比例比FDD配置模式下更为显著。这是由于相较TDD1配置,在FDD配置下系统无线资源较为充足,因此激活无人机中继服务对用户的服务质量改善不如TDD1场景下更为明显。
3.4 无人机中继开启/未开启业务平面传输时延分析
在未开启无人机中继之前,小区边缘用户↔地面基站之间是LTE接口。LTE协议在在物理层采用混合自动重传请求(Hybrid Automatic Repeat reQuest,HARQ)协议,确保数据包的正确接收。小区边缘用户的信道质量较差,会导致物理层HARQ协议频繁触发重传。因此,在开启无人机中继之前用户的传输时延主要由HARQ的重传时延决定。
在开启无人机中继之后,无人机中继的前向链路(小区边缘用户↔无人机中继)是IEEE802.11g/n协议,无人机中继的回传链路(无人机中继↔地面基站)是LTE协议。IEEE802.11g/n协议链路层采用CSMA/CA协议,多个用户数据包传输主要由传输等待/退避时延决定。因此,在未开启无人机中继之后用户的传输时延主要由CSMA/CA传输等待/退避时延以及 HARQ的重传时延决定。
如图7所示,在启动无人机中继之后,VoIP业务端到端时延下降了约4 ms。
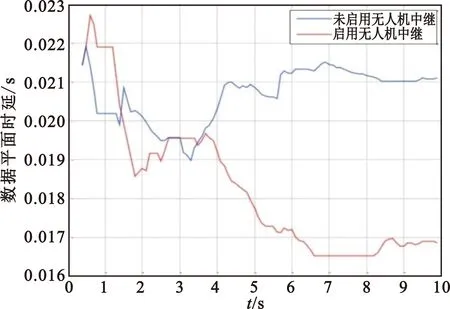
图7 无人机中继激活/去激活下用户VoIP业务端到端时延
为用户激活无人机中继服务前后物理层HARQ重传次数对比如图8所示。从图中可以看出,在未开启无人机中继服务之前,小区边缘用户↔地面基站之间HARQ平均重传次数为2~4次,而开启无人机中继服务之后,无人机中继↔地面回传链路的HARQ平均重传次数为1次。由此可以看出,由于无人机中继的回传链路重传次数显著减小,所以缩短了用户端到端的传输时延。

图8 无人机中继激活/去激活下用户HARQ平均重传次数
4 结束语
本文提出了空地协同无定形组网技术。空地协同无定形组网采用控制覆盖和业务覆盖分离的架构,即由地面蜂窝基站负责用户控制平面连接,由空中无人机中继负责用户业务平面连接。从仿真结果可以看出,无人机中继通过缩短用户与基站之间的通信距离可以有效地改善用户的信道质量,从而提升用户的业务速率。
然而,激活无人机中继服务的前提是需要用户先与地面蜂窝基站建立信令连接之后再激活无人机中继服务。由于需要激活无人机中继服务的用户通常处于阴影衰落和穿透损耗较大的区域,因此在这一区域中用户建立信令连接过程本身就很容易失败,导致后续根本无法激活无人机中继服务。在这种情况下,空地协同无定形组网需要采用控制覆盖和业务覆盖耦合的架构,由空中无人机中继同时承载用户的控制平面连接和业务平面连接。
由此可见,空地协同组网的网络架构需要以用户为中心,依据用户的实际无线信道情况进行适配演化,这也给空地协同组网带来了新的挑战,需要进一步深入研究。
猜你喜欢
小学科学(学生版)(2021年9期)2021-11-02
小学科学(学生版)(2021年8期)2021-08-30
民用飞机设计与研究(2020年4期)2021-01-21
无线电通信技术(2019年1期)2019-12-24
太原科技大学学报(2019年6期)2019-11-18
中国药科大学学报(2019年5期)2019-10-30
火工品(2019年3期)2019-09-02
海峡姐妹(2017年11期)2018-01-30
浙江农业科学(2017年4期)2017-05-11
湖北农业科学(2016年5期)2016-10-19