基于倾斜影像密集匹配点云的数字高程模型更新方法研究
2022-03-06 01:07王月如高林营周智勇
城市勘测 2022年1期
王月如,高林营,周智勇
(重庆市勘测院,重庆 401121)
1 引 言
DEM是常用在设计工作中的测量基础数据,能够提供必要的地形起伏信息。但是随着时间推移,地表因人类活动或地质灾害作用而产生变化,往期测绘得到的DEM成果时效性变差,不能满足要求,需要生产新的DEM。大范围生产全新DEM对于整体变化不大的区域是一种浪费,而在往期DEM的基础上对变化区域进行更新是比较常用的方案,既能满足时效性要求又能兼顾经济性。以往DEM更新方法主要是对变化区域重新外业测绘或通过航空摄影测量方法得到等高线、特征线、特征点后更新到原特征点线中内插得到新DEM,但是此传统方法存在着人工工作量大、地形细节有损失的缺点。随着新型测绘技术发展,点云生产DEM的作业方法逐渐被测绘行业所采用[1~3],其成果细节丰富、精度高、人工成本较低。但是获取激光雷达点云需要激光扫描仪才能够获取,对于无点云成果要求的项目来说,采集点云数据提高了工程成本。对于需求更新DEM的同时要求采集最新航空影像的项目来说,使用倾斜影像密集匹配点云对DEM进行更新[4,5],是一种降低成本同时有效保证DEM质量的方法。
2 试验区概况与试验数据
试验区选择在重庆市两江新区石船片区。该片区目前尚未大规模开发建设,地形起伏大,丘陵、丘谷交叉分布,丘谷多为池塘、梯田,丘陵缓坡上有零落的居民地聚集点和乡村道路,陡坡覆盖有茂密的常绿阔叶乔木,丘陵顶部植被稀疏,多为草本植物和零星小型灌木。
该区域在2020年使用机载LiDAR点云生产了 1∶1 000比例尺的CGCS2000高斯投影3°分带的DEM成果,为了满足新的使用需求,需提供该片区现势性较强的2021年重庆独立系中带 1∶1 000比例尺DEM成果。因该片区地形整体变化不大,仅部分区域因道路建设有所变化,故整体生产新的DEM势必造成人力的浪费。针对变化区域进行更新是经济性高、节省工期的优势方法。
因为项目同时有数字正射影像产品需求,考虑到成本,故将航飞得到的倾斜影像密集匹配点云作为DEM更新的源数据,而不是重新对整个区域获取机载LiDAR点云。倾斜影像密集匹配点云点密度为 16点/m2,坐标系为重庆独立系中带。另外还需要当期航飞后处理得到的数字正射影像和历史DEM对应的往期数字正射影像用以对比后获取更新范围。主要更新操作基于的软件为西安煤航的LiDAR点云数据处理系统LiDAR_DP。
3 DEM变化区域更新
3.1 更新流程
通过对比两期数字正射影像中变化的部分,人工目视解译出需进行更新的范围;对历史DEM进行坐标转换至成果要求的坐标系并反生成点云;对倾斜影像密集匹配点云中的更新范围内点进行滤波,提取出地面点;将历史DEM转出的点中更新范围内的点去除,并加载新更新范围内的新点;对更新范围内的点和新旧点接边处进行人工处理,对滤波不恰当区域进行调整、处理水面,必要时绘制特征线;将更新后的点云按照需求生成DEM成果。详细流程如图1所示。

图1 项目实施流程图
3.2 数据预处理
历史DEM首先要经过坐标转换,由原始坐标系转化为成果要求的坐标系。DEM为栅格格式文件,为使其能被点云处理软件读取,需要将其在ArcGIS中转化为以点为单条记录的由X、Y、Z坐标信息构成的文本文件。在点云处理软件中读取文本文件后,使用类别转换工具,将所有点转换成地面点类别,得到历史DEM反生成点云。
倾斜影像密集匹配点云是利用航飞影像,经过空三加密后计算生成[6]。为了给点云滤波时提供更多信息以提高滤波效果,适当提高了点云密度。生成的倾斜影像密集匹配点云坐标系为重庆独立系中带,经过精度检验后满足生产 1∶1 000比例尺的精度条件。
3.3 更新范围数据处理
叠加前后两期影像,目视判断更新范围,并且用面矢量画出更新范围。绘制更新范围时,需要将变化的部分全部囊括,但是不建议扩展太多,特别是未变化区域涉及植被茂密、有房屋的情况。因为扩大更新范围意味着后期处理工作量的增大,并且茂密的植被和房屋处倾斜影像密集匹配点云滤波效果一般,反而通过机载LiDAR点云生产的历史DEM在精度上较能保证。
在点云处理软件中读取倾斜影像密集匹配点云,按照更新范围矢量面批量提取出更新范围内的点。密集点云经过滤波可以减少后期人工处理的工作量[7],使用滤波工具对更新范围内的倾斜影像密集匹配点云进行噪声剔除和地面滤波。经试验,LiDAR_DP对倾斜影像密集匹配点云中人工裸露地表和植被稀疏区域滤波效果尚可,对植被茂密区域滤波效果较差,如图2所示。

图2 倾斜影像密集匹配点云滤波前(左)后(右)对比图
在点云处理软件中读取历史DEM反生成点云,按照更新范围矢量面批量将更新范围内的历史点云剔出地面点类别,并将滤波后的更新范围内倾斜影像密集匹配点云加载进来。历史DEM反生成点云与模型点云中的地面点类别共同参与构建三角网,即为新旧点云结合后进行更新处理的底板。
3.4 DEM更新细节处理
在得到的更新底板上进行进一步的人工细节处理[8],主要目的是对倾斜影像密集匹配点云里滤波效果不好的区域进行植被处理、水面及人工建(构)筑物绘制特征线约束,以及新旧点云接边处理[9]。
(1)茂密植被覆盖处理
倾斜影像密集匹配点云受制于无穿透性的条件限制,在植被茂密处无法提供真实的地面点以供参考。对于植被茂密处的处理主要参考周围地形模拟表现植被下方地形。然而在实际更新时,变化区域为人工地表较多,基本无大面积的植被遮挡或植被未生长得很茂密,故该项倾斜影像密集匹配点云生产DEM的固有缺陷在仅进行变化区域更新时已被弱化,如图3所示。
(2)水面置平或渐变处理
倾斜影像密集匹配点云因水面连接点相似性太高不好匹配,所以得出的点云并不是一个平面,而会有错误的凹陷,需要综合航飞影像绘制水涯线,并对池塘、湖泊置平,对河流按照上下游河岸高程差梯度渐变,如图4所示。
(3)人工建(构)筑物处理
房屋处因滤波失去了墙面和屋顶点,地基处地形无法正确表示,需要参考正射影像在房前屋后恰当处绘制断裂线进行局部置平,还原房屋底真实地形;架空桥梁处自动滤波后,会有架空部分未完全剥离或剥离架空点后基底地形还原不真实的问题,需要手工还原基底;边坡陡坎自动滤波后如果坎沿未正确表达,需要人工添加特征线还原坡坎边缘形状,如图5所示。

图3 茂密植被覆盖影像(左)及处理前(中)后(右)效果对比图
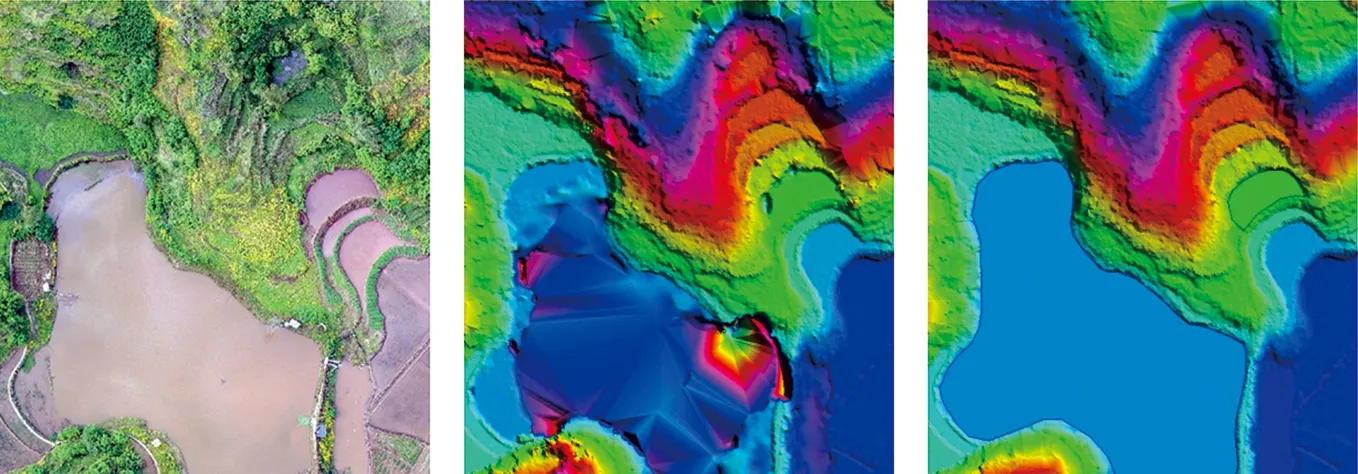
图4 池塘水面影像(左)及处理前(中)后(右)效果对比图
(4)新旧处接边
新旧点云接边处,因为植被遮挡、点云厚度等影响,会出现过渡生硬的问题,影响DEM成果的美观,需要对接边过渡生硬明显处进行平滑处理,使新旧点云结合更紧密,如图6所示。

图6 接边处理前(左)后(右)效果对比图
3.5 检查与成果生产
更新处理完成后需要对地面点构成三角网模型进行检查,主要检查更新区域内部需要人工处理的问题是否处理完善和新旧接边处是否处理得当。检查无误后,输出构建的DEM成果。
4 DEM更新成果
4.1 效果验证
更新后的DEM成果,能够合理表达变化区域的地形现状,且新旧过渡合理,达到了预期的效果,如图7所示。

图7 更新前(左)后(右)效果对比图
4.2 精度评价
使用外业检查点法对更新后的DEM进行精度检查,评定更新后的DEM精度。该片区属于山地,根据DEM数据技术指标,格网点高程中误差 1.0 m,精度检查表如表1所示。高程误差统计后得出中误差为 0.29 m,最大误差 0.83 m。符合 1∶1 000比例尺精度要求。
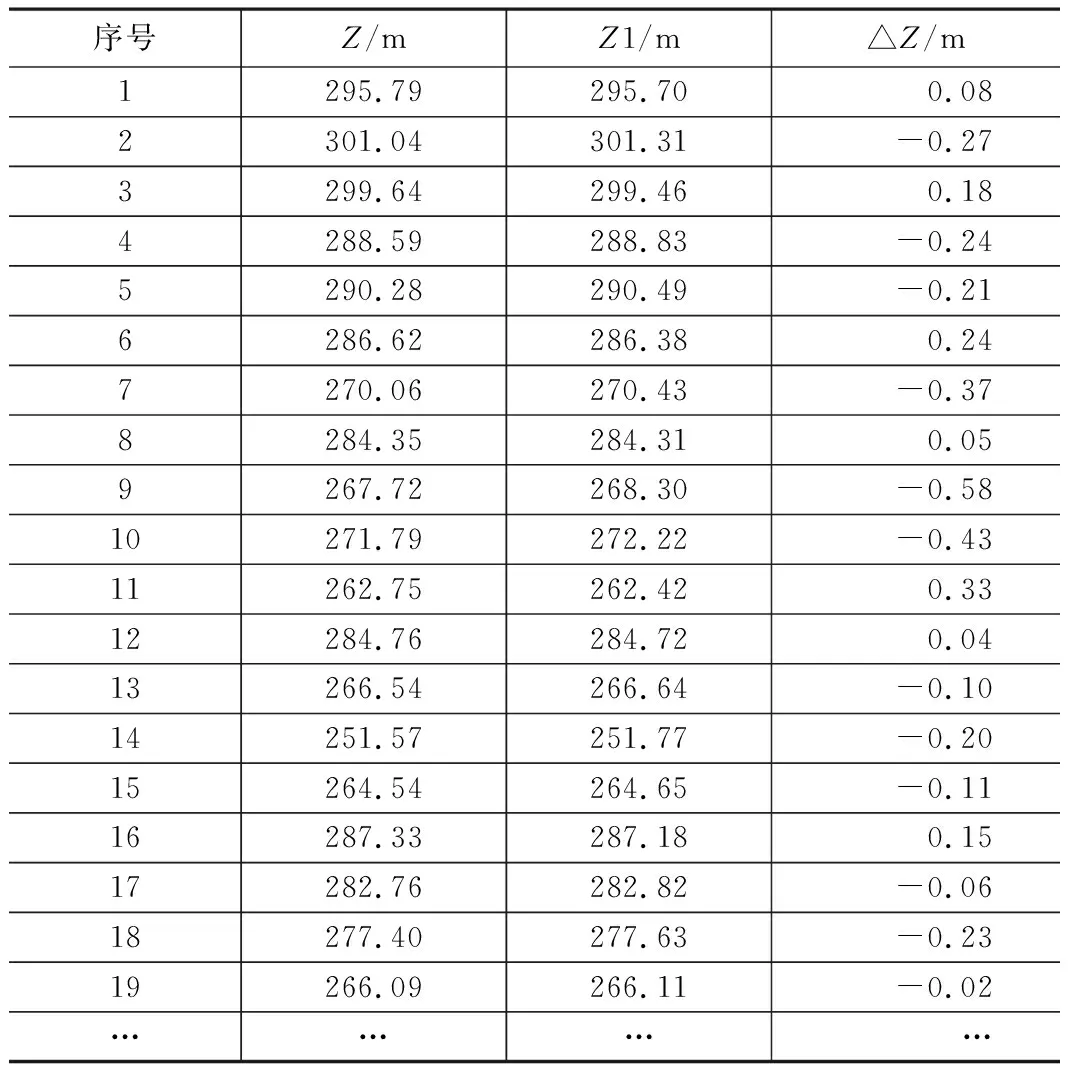
DEM高程精度检查表(部分) 表1
5 结 论
本文提出了一种基于倾斜影像密集匹配点云更新DEM的方法,该方法比传统采集等高线、特征线更新DEM的方法细节更丰富,精度满足要求,且不需要单独获取激光雷达点云数据,降低了生产成本。本方法适用的场景为变化区域主要为人工地表和植被稀疏区域且项目本身需求航空摄影的大比例尺DEM更新情况,如此既能保证更新成果的质量也不会额外增加生产成本。
本方法也具有局限性,例如待更新区域如果被茂密的植被覆盖或者需要额外增加生产成本投入以获取倾斜影像时,本方法优势便不明显。本方法中主要的工作量在于倾斜影像密集匹配点云滤波后的人工处理环节,所以倾斜影像密集匹配点云的滤波效果对工作量的影响较大,如何提高倾斜影像密集匹配点云的滤波效果是下一步的研究方向。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
科学技术创新(2022年30期)2022-10-21
河北地质(2022年2期)2022-08-22
今日农业(2021年9期)2021-11-26
英语文摘(2021年2期)2021-07-22
课外生活·趣知识(2021年2期)2021-05-24
学校教育研究(2021年24期)2021-03-28
电子制作(2019年9期)2019-05-30
电子制作(2018年16期)2018-09-26
火控雷达技术(2016年3期)2016-02-06