一种多镜头无人机图传装置硬件电路设计与实现
2022-03-07 10:11李宇峰
电子测试 2022年24期
李宇峰
(湖南信息职业技术学院,湖南长沙,410200)
0 引言
随着无人机技术的兴起,航拍逐渐进入人们视野。目前的航拍图传采用相机多是三镜头,或者是四镜头的,而三镜头或是四镜头全景相机拍照效果较差,不是真正意义上的全景相机。而六镜头的全景相机虽然已经推出,但是其控制电路复杂,器件众多,可靠性不高,而且相机数据的导出需要连接数据线,使用极其不便。本文提出并设计了一种多镜头无人机高清图传装置的硬件设计方法,整个电路设计简单可靠,并且数据的导入导出也非常灵活。
1 多镜头无人机高清图传装置的系统设计
1.1 多镜头无人机高清图传装置的功能模块
如图1所示为本文设计的多镜头图传装置功能模块图:包括控制器电路、数据转发电路、镜头接口电路、数据接口电路、电源电路、串口扩展电路和无线通信电路。电源电路给控制器电路、数据转发电路、相机接口电路和数据接口电路供电;控制器电路用于从数据转发电路接收相机镜头发送的数据并进行处理,将控制电路的数据通过数据接口电路对外进行发送,或者从数据接口电路接收外部对控制电路发送的数据;数据转发电路用于接收相机镜头产生的数据,并转发给控制器电路;镜头接口电路用于连接相机镜头;数据接口电路用于连接外部设备;串口扩展电路与控制器电路连接,用于提供与控制器电路连接的多个串口;无线通信电路与控制器电路连接,用于控制器电路将控制电路的数据对外发送,或者接收外部设备对控制电路发送的数据。

图1 图传装置功能模块图
2 多镜头无人机高清图传装置的模块化设计
2.1 串口扩展电路
串口扩展电路采用由型号为SN74CBTLV3257的复用芯片U1构成的电路;串口扩展电路与控制器电路连接,用于提供与控制器电路连接的多个串口。如图2所示,U1的1脚通道选择引脚连接到控制器电路中控制器芯片的36脚,用于通道切换控制;U1的第4、7、9、12脚分别连接到控制器芯片的第43、42、52、51脚,用于与控制器芯片的串口数据收发;U1的第2脚、第5脚连接到镜头1的接口的串口收、发;U1的第3脚、第6脚连接到镜头5接口的串口收、发;U1的第11脚、第14脚连接到镜头6接口的串口收、发;U1的第10脚、第13脚连接到镜头4接口的串口收、发;U1的15脚片选引脚接低电平,持续选通。
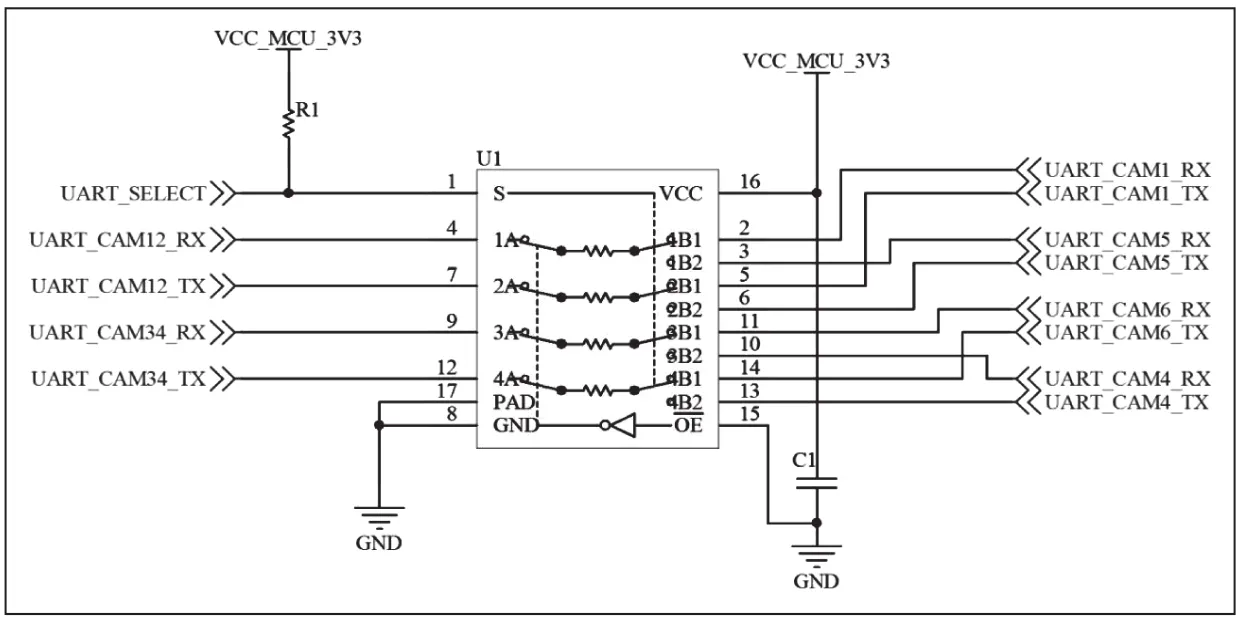
图2 串口扩展电路
2.2 相机接口电路设计
相机接口电路如图3所示。图中J1为相机镜头接口,每个相机镜头接口包含4个相机供电引脚(VCC_CAM_SUPPLY),2个 HDMI电源引脚(HDMI1_+5V),12个HDMI信号引脚,2个串口信号引脚(UART_CAM1_TX和 UART_CAM1_RX),2个 USB信号引脚(USB2_DN1_D_P和 USB2_DN1_D_N),1个 中断信号引脚(CAM1_INT),1个相机复位信号引脚(CAM1_RESET)和7个信号/电源的引脚(GND)。本文所设计的图传装置共有6个类似的相机镜头接口,用于连接6个相机镜头。

图3 相机接口电路
2.3 无线通信电路设计
如图4所示为无线通信电路的电路原理图,无线通信电路与控制器电路连接,用于控制器电路将控制电路的数据对外发送,或者接收外部设备对控制电路发送的数据。无线通信电路采用由型号为UM402的无线通信模块构成的电路;模块的第3、4脚分别连接到控制器芯片的第15、14脚,用于串口数据收发;其第5、6、7脚分别连接到控制器芯片的第10、11、21脚,用于模块的收、发及通信参数控制。模块电源通过电源开关芯片U10控制,U10采用型号为NCP340MUTBG的软启动可控负载开关芯片,U10的第3脚连接到控制器芯片的第62脚,用于模块电源开关控制,低电平开启模块电源,高电平关闭模块电源。
2.4 数据接口电路设计
如图5所示为数据接口电路的电路原理图:数据接口电路为HDMI接口电路;J10为相机镜头的HDMI接口,用于把相机镜头接口输出的HDMI信号转接成标准HDMI接口信号。每个HDMI接口包含12个与相机接口的HDMI信号对应连接的HDMI信号引脚,包含1个HDMI电源引脚(HDMI1_+5V)和包含6个信号/电源的引脚(GND)。整个图传装置共有6个类似的HDMI接口电路,用于连接6个相机镜头。
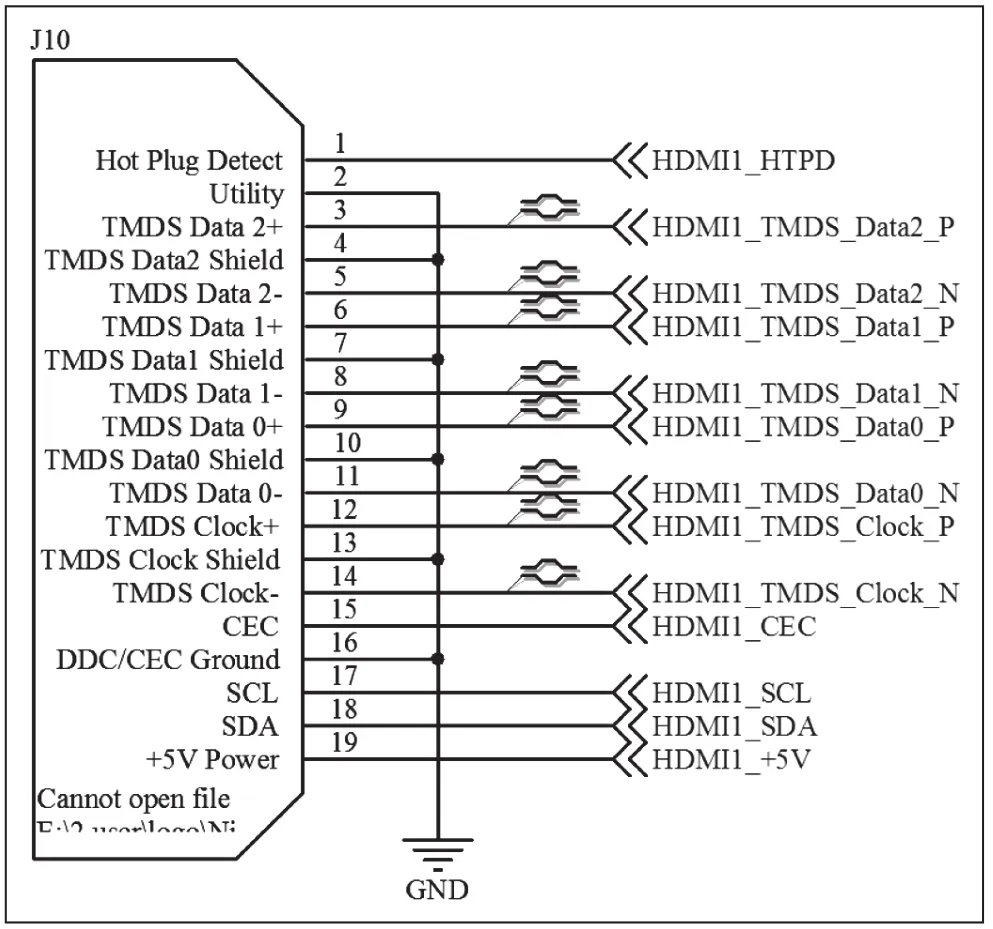
图5 数据接口电路原理图
2.5 充电器芯片的电路设计
如图6所示为电源电路的BQ24195RGE的充电器芯片的电路原理图:芯片通过I2C接口控制器芯片通信,用于电源参数控制;其通过第7脚提供中断信号给控制器芯片的第2脚,电源有异常事件时可主动告知控制器芯片;其1、24脚与输入电源连接,这两个管脚还通过电容C50、C51接地;其23脚提供V5P0电源输出,这个管脚还通过C54~C59接地;其8脚通过电阻R53连接到VCC_SYS电源网络;其4脚接LED1的阴极,LED1的阳极通过电阻R54连接到REGN电源网络;其9脚通过电阻R56接地;其17、28、25脚接地;其19、20脚通过电感L1连接到VCC_SYS电源网络,还通过电容C52连接到21脚;其22脚通过电容C62接地,还通过电阻R55连接到11脚;其15、16脚连接到VCC_SYS电源网络,还通过电容C60、C61、C63接 地;其 13、14脚连接到电池+极,还通过电容C66~C68接地;其10脚通过电阻R58接地;其11、12脚连接到NTC电阻J9,还通过R57接地。
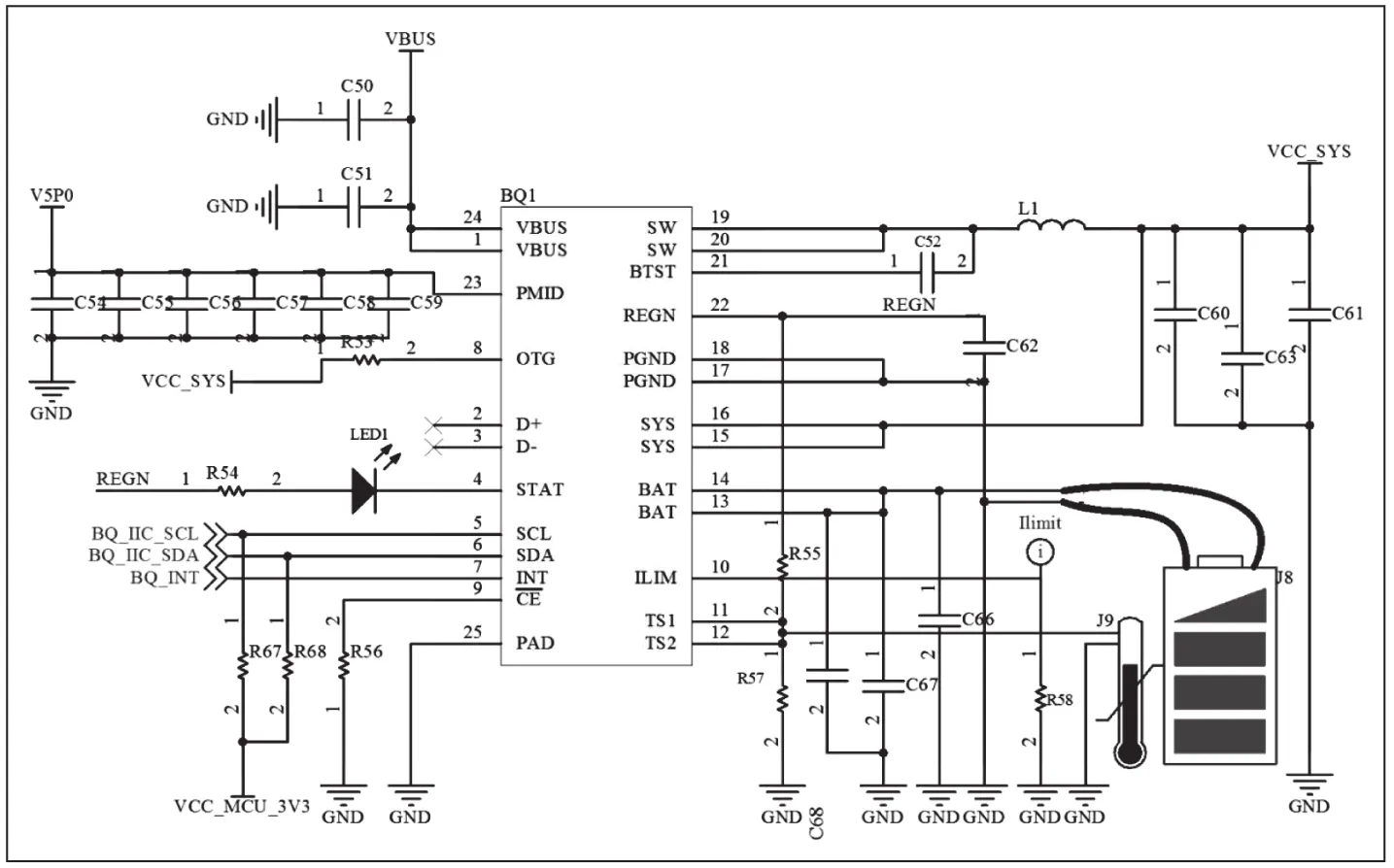
图6 充电器芯片的电路原理图
2.6 电源芯片电路设计
如图7所示,为本高清图传装置中电源电路的TPS62130RGT的电源芯片电路原理图:芯片的10~12脚为电源输入,连接到VCC_SYS电源网络,其13脚使能脚也连接到VCC_SYS电源网络,还通过电容C72、C73接地;其9脚通过电容C74接地;其0、6~8、15、16脚接地;其1~3脚通过电感L2连接到HUB_VCC1V1电源网络,还通过电容C71、C75、C76、C81接地;其14脚连接到HUB_VCC1V1电源网络;其5脚通过电阻R62接地,还通过电阻R60连接到HUB_VCC1V1电源网络。
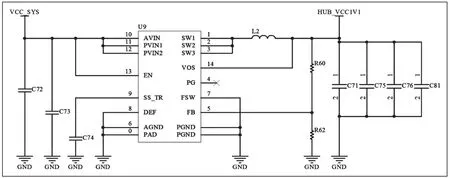
图7 电源芯片电路原理图
2.7 控制器电路设计
控制器电路采用由型号为STM32F072RBT6的控制器芯片组成的电路,如图8所示。控制器芯片使用3路串口与串口扩展电路连接,用于串口数据收发;其通过I2C接口与HUB电路连接,用于电路参数设置与管理;其通过串口与无线通信模块连接,用于无线数据收发与参数配置;其通过第23脚控制由蜂鸣器B1、三极管Q1、电阻R63组成的蜂鸣器电路。晶振Y3,电容C46、C47组成外部晶振电路;电容C41~C45、C48组成电源滤波电路。
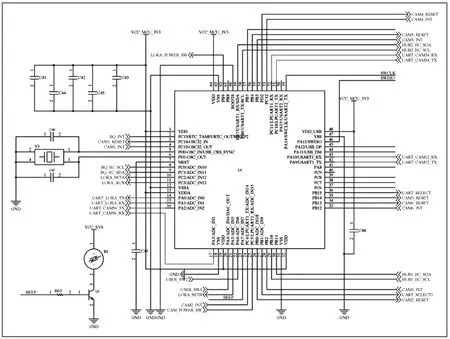
图8 控制器电路原理图
3 多镜头无人机高清图传装置的外观结构及使用
整个无人机航拍装置结构如图9所示,包括无人机本体1,本体1的底部对称设有支架4,本体1的两侧设有旋臂3的内部安装有驱动装置11,驱动装置11的上部输出端设有螺旋机翼2,无人机本体1的内腔底部设有蓄电池12本体1的内腔上部设有移动终端13,本体1的前后部居中安装有航拍摄像头5,无人机本体1与支架4接触处设有伸缩槽6、定位槽7,伸缩槽6与定位槽7之间设有弹簧限位凸起10,支架4的上部设有支架限位凸起8,上部套接有减震弹簧9。
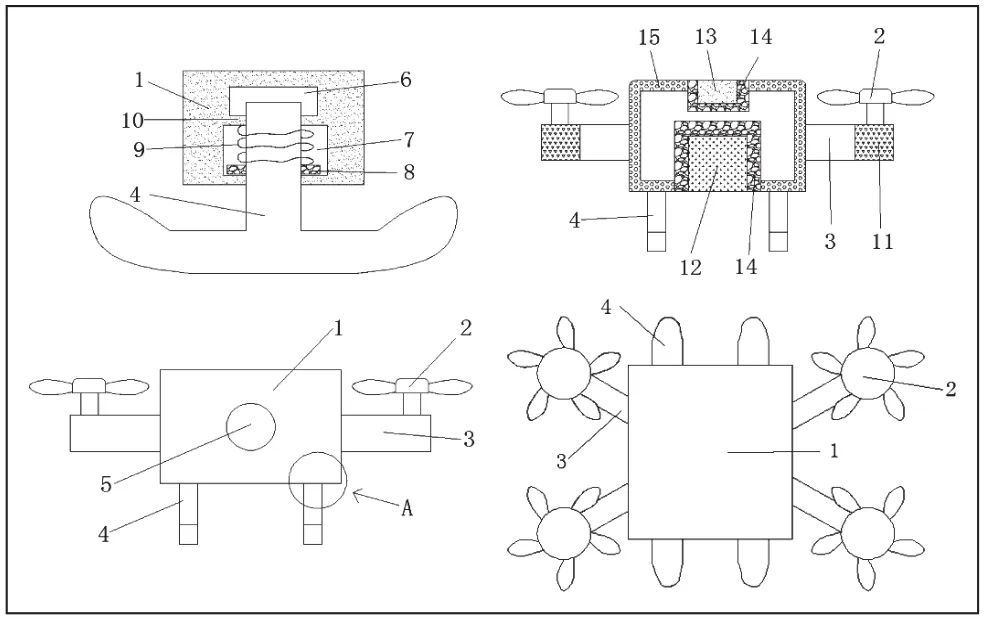
图9 无人机航拍装置结构
蓄电池12和移动终端13的外侧均设有保护层14,通过保护层14的设置,使得在温度寒冷的外界环境下,保证蓄电池12和移动终端13始终保持在正常的工作环境,有利于蓄电池12给移动终端13、驱动装置11和航拍摄像头5供电,有利于移动终端13接收航拍摄像头5图像信号并发出无人机遥控信号。航拍装置5在装配时首先将带元件的主板、带电池的电源板以及图像处理板三块PCB插入下支架的安装卡槽中,再将上支架与下支架合拢,组成正方体框架; 正方体框架有十二条棱边,其中二条棱边上设有U型槽,将两块I/O接口板分别安装于相应的U型槽内,然后将六个镜头模组装在传感器电路板上,再将六块传感器电路板分别装入正方体框架的六个面的下沉台阶里,其中镜头模组的排列采用纵横交错的方式进行,每个镜头模组采用四个螺钉固定,至此全景相机内部的零部件已经组装完毕;接着将上壳体与下壳体套在装配完成后的支架外组成一个完整的菱形球体,上壳体和下壳体分别设有U型的条形槽,棱形球体由若干全等三角形面和全等六边形面组成;其中8个三角形面的中心位置具有螺钉孔,与由上支架、下支架组成的正方体框架的顶点对应,6个六边形面的中心具有圆形通孔,用于镜头模组的镜头通过,将硅胶按键、硅胶防护盖装入上壳体和下壳体的条形槽中,再把装好硅胶零件的上壳体和下壳体将带印制板的铝合金正方体框架封装成为菱形球体。最后将镜头装饰片装入镜头凸起环,再把镜头凸起环扣在菱形球体的镜头处,盖上镜头盖,之后将沉头螺钉拧入上、下壳体的螺钉孔中将壳体与支架连为一体,最后压入螺孔堵塞即完成整个装配。装配好的支架内安装有主板、电源板和图像处理板。支架为镂空的正方体型框架,包括可拆卸连接为一体的上支架和下支架,以保证镜头模组4在装配时能够均匀分布并且实现可靠定位。支架的各个面上均通过螺钉连接有传感器电路板,各传感器电路板上均装有镜头模组,保证镜头模组位于各面的中心位置处,镜头模组的镜头伸出外壳外。支架各棱中边的两条棱边上设有U型槽,两U型槽内分别安装有一块I/0接口板,其中一块接口板上具有USB2.0、USB3.0和HDMI接口,另外一块接口板上具有MICROSD卡、电源键及LED显示。镜头模组的全景视频分辨率达到4K:3840×1920p24/25/30/48/50/60、4096X2048p24/25/30/48/50/60.镜头模组的全景照片分辨率达到8192×40968192×8192,以保证拍摄的效果,同时将全景投影方式设计为支持等圆柱投影、平面投影、Pannini投影、墨卡托投影、鱼眼投影、小行星投影、正弦投影和等矩形投影以增大本实施例的适用范围,并且使全景视频实时直播支持WIFI、4G、Ethernet、HDMI。
减震弹簧9卡接于支架限位凸起8和弹簧限位凸起10之间,通过减震弹簧9的设置,在无人机完成航拍任务降落地面,支架4接触地面,支架限位凸起8挤压减震弹簧9,减震弹簧9挤压弹簧限位凸起10,此时,支架4的上端位于伸缩槽6的内部,减震弹簧9起到很好的减震作用。
无人机本体1的内腔沿壁设有保温层15,通过保温层15的设置,保证了无人机本体1的内腔各个设备的工作温度处于正常状态。旋臂3为对称设置,通过旋臂3的设置,旋臂3的内部安装有驱动装置11,在驱动装置11通过蓄电池12供电后,给螺旋机翼2提供动能,旋臂3可完成对无人机本体1的提升。
使用时,移动终端13发出无人机遥控信号,此时,驱动装置11通过蓄电池12供电后,给螺旋机翼2提供动能,旋臂3可完成对无人机本体1的提升,航拍摄像头5拍摄图像后,移动终端13接收航拍摄像头5图像信号,并将图像信号传递至地面控制中心,通过安装有的航拍摄像头5,满足了多角度,多方位的拍摄,保证拍摄效果,在无人机完成航拍任务降落地面,支架4接触地面,支架限位凸起8挤压减震弹簧9,减震弹簧9挤压弹簧限位凸起10,此时,支架4的上端位于伸缩槽6的内部,减震弹簧9起到很好的减震作用。
4 总结
本文提出并实现的多镜头无人机高清图传装置,能同时携带6个高清航拍摄像头。整个装置包括控制器电路、数据转发电路、镜头接口电路、数据接口电路、电源电路、串口扩展电路和无线通信电路。各电路设计简单可靠,并且数据的导入导出也非常灵活,通过扩展平衡充电模块,增加电池的使用寿命,为后续进一步研制高清图传研制提供了一定的参考价值。
猜你喜欢
装备制造技术(2020年11期)2021-01-26
时代邮刊·下半月(2020年9期)2020-09-23
科技视界(2019年19期)2019-08-29
金桥(2018年6期)2018-09-22
小学生优秀作文(低年级)(2018年6期)2018-05-19
航空模型(2017年12期)2018-05-08
作文通讯·高中版(2017年6期)2017-07-10
航空模型(2016年5期)2016-07-25
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22