基于DRV8424 驱动的医疗X 射线机限束器控制系统
2022-03-09 01:50邢丽娜吴广智孟宪华李健铎
科学技术创新 2022年4期
邢丽娜 吴广智 孟宪华 李健铎
(1、贵州黔南科技学院,贵州 贵阳 550600 2、东软医疗系统股份有限公司,辽宁 沈阳 110034)
现代医疗设备技术高度发展,较集中的反映了当代生物医学工程技术和医疗器械的水平,其中最具代表性的技术是数字医学影像技术。数字医学影像技术即医疗影像诊断体系包含了医疗X 射线机、CT、MRI、医疗超声等,它们共同构成了影像检查的主力框架,医疗X 射线机依旧在各医院中表现为最常规设备,普遍运用于临床透视、摄片,尤其是等诊断中,使用率较高。本文背景为医疗X 射线机产品线用的大板乳腺机的摄影需求,医疗X 射线机用电动限束器作为系统重要的影像部件,其主要作用是利用可调间隙的铅板,遮去不必要的原发射线,从而改变实际使用的照射视野,达到最优的乳腺诊断需求。电动限束器遮线板的运动控制由单片机、步进电机驱动、步进电机等实现。
1 线束器的工作原理
电动限束器遮线板的移动动力是由中小型步进电机提供,通过控制步进电机步进角及正反运动,即可将照射野调整到所需尺寸,电机一般使用微型直流电机,并在关闭和最大张开位设有限位开关。而本技术方案限束器采用钣金结构+步进电机+齿轮齿条传动,充分考虑了机械加工件、电机等关键件成本,仅保留最大开口位限位开关,新机构成本低,结构简单,组装容易,电控精度高。
此外,传统限束器对安装位置的偏差,限位开关的位置偏差有较高要求,出厂时光射野一致性的调试费时费力,需反复调整反复验证。本技术方案中提出了一种新的校正方法,通过全自动的方式实现,使出厂调试时间大大缩减。图1为电动线束器的原理框图。

图1 电动限束器原理框图
电动限束器由齿轮齿条传动机构,电控板、步进电机驱动器、步进电机等组成,共4 个shutter 即X 轴2 个、Y 轴2个,每个轴包含一个电机和一个光电开关。依据机械结构,设计成两块电路板,原理框图如图1 所示。电动限束器中,通过单片机通过读取上位机的指令发出电机使能信号、方向信号、脉冲信号等控制步进电机正转或反转,电机轴带动齿轮齿条,从而实现4 个shutter 的正向或反向运动。
电动限束器校正方法,利用图像识别出限束器在图像上的位置,然后利用坐标系映射转换成射野坐标系下的位置,根据限束器移动的特点,建立线性数学模型,通过少量次数的曝光,拟合出电机步数与遮线器位置的关系函数,最后通过上位机软件与电控板板间的通讯实现限束器的全自动校正。
电动限束器物理开口与射野以及图像中射野识别区域涉及多层坐标系,如图2 所示。三种坐标系的单位分别为:物理坐标系单位:毫米(mm);射野坐标系单位:毫米(mm);图像坐标系单位:像素(Pixel);

图2 限束器坐标系映射

其中,图像上,遮线器x 轴坐标X-SHUTTER 反映的是图像识别出水平遮线器左沿和右沿的物理位置,分别为H_lPos2 和H_rPos2;遮线器y 轴坐标Y-SHUTTER 反映的是图像识别出垂直遮线器上沿和下沿的物理位置,分别为V_uPos2 和V_dPos2。 PixelWidth 与PixelHeight 分别为图像像素尺寸的宽和高,而Scale = SID / D1。
2 电动线束器硬件设计
电路主控芯片单片机选择STM32F429 及外围电路搭建控制最小系统,步进电机驱动选择TI 公司的主流步进电机驱动芯片DRV8424。电机工作时,需要24V 的动力电源;而单片机工作时,只需要3.3V 的直流电源,为了保证3.3V 的系统电源不被24V 的动力电源干扰,需要保证24V 动力电电源与3.3V 直流电源相互隔离。电机的驱动信号需要通过光耦将电机驱动芯片的方向信号、脉冲信号以及使能信号进行信号隔离。
在电机不工作时,仍然需要输出电机使能信号,即恒流控制,以达到锁定机构的目的,但此时电机发热会很大,为了尽可能减少电机发热,设计了半电流控制电路。由于限束器射野大小最终体现在摄影图像上,故考虑用图像衡量限束器开口大小,进而通过算法实现了一种电动限束器的控制方法。
2.1 电源电路
外接的EXT_+24V 动力电源经过电路板的板端滤波器BNX002-1、板端保险丝、滤波电容等,为电机驱动芯片DRV8825 供电,进而驱动步进电机。具体见图3 所示。

图3 24V 电源电路
步进电机驱动芯片的控制信号需要+5V 的电源,故通过DC-DC 模块,将+24V 转换成+5V,电源转换电路如图4所示。

图4 电源转换电路
2.2 步进电机驱动电路
DRV8424 是TI 公司研发的适用于工业和消费类应用的步进电机驱动器。该器件由两个N 沟道功率MOSFET H 桥驱动器、一个微步进分度器以及集成电流感应功能完全集成,可驱动最高2.5A 的满量程输出电流。进电机驱动电路如图5 所示,其中nSleep 脚为睡眠控制脚,低电平为睡眠模式,同时也是复位脚;nSleep 脚、Enable 脚为高时,电机驱动器工作;STEP 脚为驱动芯片的脉冲控制信号控制步进速率;DIR脚为驱动芯片的方向控制信号。AOUT1、AOUT2、BOUT1、BOUT2 为步进电机接口。
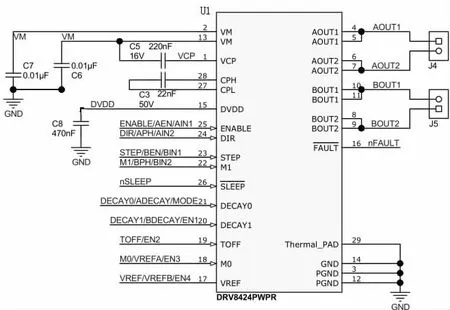
图5 DRV8424 步进电机驱动电路
2.3 控制信号接口电路
由于电机的方向和使能信号非高速信号, 故采用低速光耦ACPL-247 隔离,而电机的脉冲信号为高速信号,故采用高速光耦HCPL_0600 进行隔离,接口电路如图6 所示。当驱动芯片识别到电机运行有问题时会置FAULT 信号,并点亮红色的错误指示灯,此时单片机也会有效检测到。

图6 控制信号接口电路
3 电动线束器控制流程设计
电动线束器控制系统通过主控单片机实现,其主要包括CAN 通讯接收上位机指令、步进电机的控制脉冲产生与控制、光电开关位置检测等相关功能,用以实现4 个shutter 的运动控制。
上位机软件通过CAN 通讯控制电路限束器共同完成限束器的控制流程。具体步骤如下:
(1)移动遮线器到光电开关位置,此时步进电机的步数为0。
(2)控制遮线器电机运动Si 个电机步数后进行曝光,如图7 所示。i 代表第i 次执行此步骤,为了线性拟合,要求每次运动的电机步数不相同,且尽可能覆盖到开口全区域。

图7 遮线器电机运动Si 个电机步数后状态
(3)利用图像识别技术,识别出图像上的遮线器位置Pi,然后记录下图像上遮线器的位置和当前对应的电机步数。
(4)重复步骤(1)~(3)三次以上。
(5)将得到的几组遮线器电机步数与遮线器图像坐标带入线性拟合公式中,如图8 所示,得到线性关系函数。

图8 遮线器电机步数与遮线器图像坐标的线性拟合
(6)根据坐标系映射关系公式,可以得出遮线器的电机步数分别与射野坐标位置,还有物理坐标位置的线性关系函数。
4 方案应用效果
该技术方案已经应用到医疗X 射线用的大板乳腺机产品中,实现了限束器自动校正过程及应用控制。限束器校正通常的做法是通过调节光电开关的位置,来确保限束器走位的准确。但靠近X 线焦点的遮线器位置的微小变化放大到限束器投影,则会变化很大。因此,通过手动调节光电开关位置来校正限束器十分不便,准确性也很低。新的限束器校正方法,自动完成,无需人工调整光电开关,避免了反复验证反复调整,大大缩短了出厂调试时间,省时省力;新的校正方法操作简单,充分利用图像识别技术,可以在较少次数曝光下,得到精准的校正结果;方法通用性强,可应用到其它数字X线摄影系统中。
整个设计过程鉴于产品对低成本的严格要求,部件中关键件的选择尤为重要,本技术方案中选择钣金件+步进电机,而摒弃了传统铸件+直流电机的方案;设计过程中需更注重细节上的设计,例如步进电机脉冲控制信号的隔离就要注意选择高速光耦等;实际测试完成限束器自动控制,效率和准确性有了大幅提升。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
奇妙博物馆(2021年4期)2021-05-04
小读者(2021年2期)2021-03-29
小演奏家(2018年9期)2018-12-06
汽车观察(2018年10期)2018-11-06
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
车迷(2017年10期)2018-01-18
党的生活(黑龙江)(2017年10期)2017-11-09
北京汽车(2017年3期)2017-10-14