
验证最小尺度的可靠药物递送 通过仿生人工微管解决微纳机器人运行可靠性难题
2022-03-09 00:32综合整理报道
海外星云 2022年21期
用微纳机器人精准递送药物一直是科学家想实现的目标,从实际应用的角度来看,如果让微纳机器人自主或借助外场操控,实现自己走到病灶,或者达到人体内的精准位置释放药物,无论从应用还是基础研究都是一种巨大的进步。
但这是一条充满荆棘的道路,对此,德国康斯坦茨大学物理系博士后顾红日打了一个比喻:“这就像是在风雨交加的天气中,想通过无人机把快递送到遥远的村庄。”
远途、环境障碍、是否可控,每一道关卡都让实现“安全、平稳地运输”充满不确定性。但实际上,将尺度缩小几千倍到微纳尺度,微纳机器人实现精准递送药物比无人机送快递的情况复杂得多、难度也更大。
近期,苏黎世联邦理工学院和宾夕法尼亚大学团队设计开发了一种仿生人工微管系统,这是一种由磁性颗粒组成的嵌入式微纤维,其“细而长”的形状与头发丝类似,宽度80微米,高度40微米,长度则可以达到几厘米。
在微纳尺度下,该人工微管为微纳机器人走得更稳、更精准提供了新方案,相当于在血管的复杂环境中,为微纳机器人架起一座“专用高速公路”。与现有的磁性微纳机器人相比,使用这种人工微管可将其运行速度提升1个数量级,未来有望应用在人体血管中递送药物时发挥其稳定的优势。
相关论文以《用于快速和集体运输磁性微型货物的人工微管》为题发表。
该论文第一作者兼共同通讯作者为苏黎世联邦理工学院顾红日博士,共同通讯作者还包括宾夕法尼亚大学物理与天文学系阿诺德·J·T·M·马蒂森助理教授、苏黎世联邦理工学院机器人与智能系统研究所布兰德利·尼尔森教授。
相关论文
“给微纳机器人脚上穿上吸铁石”
当前,国内外很多课题组都在研究微纳机器人,并在成像、材料、驱动、控制和导航等方面取得进展,但微纳机器人的主要技术难点在于,难以做到三个部分的“完美平衡”。
第一,微纳机器人体积有限,因此必须确定在它身上放哪种材料。以磁性微纳米机器人为例,为使其在磁场中保持更加有力、高速的运动,就需要强磁性材料作为保障。
第二,可承载递送药物的具体定量。
第三,由于微纳机器人在体内是无线移动状态,因此达到精准追踪和控制的目的,制备微纳机器人的材料还需满足在X光下可显影被看到。
顾红日表示:“这三部分其实都要抢占微纳米机器人上宝贵而有限的空间,因此如何来平衡这三部分就变成了一道难题。但实际上,并不是说将这三部分集成在一起就可解决该问题。”

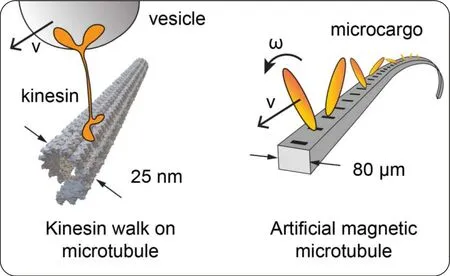
细胞微管的主动传输(左)和人工微管(右)
既然空间和效率是绕不过去的难题,该团队于是提出,是否跳出这三部分非此即彼的局限,而通过一种外界辅助的方法,来让微纳机器人更稳定和精准呢?考虑到目前一些相关的介入手术已非常成熟,通过在人体血管直接插入导管就可实现体内导航,比如在心脏或大脑动脉瘤放入支架。
因此他们想通过类似的方案——通过人工微管的辅助,让微纳机器人更精准地、更稳定地递送将药物到更远的位置。利用这种方案,该团队在同样磁性材料的情况下,可以让微纳机器人在更高粘度的甘油中实现了“逆流而上”、走得更快,并且无需在载药量方面做出让步。

在微血管网络中应用人工微管的使用场景。首先,将微导管(直径~0.5mm)插入至其无法进入较小血管的极限处。然后,将人工微管(直径~0.05mm)推出,并以磁性方式将其引导至细小的血管分支,并通过驱动微型载药机器人到达目标肿瘤。与自由游动的微型机器人(i)相比,微型机器人沿 人工微管(ii)的运输速度更快、更稳健
“仿生人工微管最重要的作用是解决了微纳机器人在人体内稳定性的问题,让我们不需要高频率的主动控制和追踪微纳机器人,只需了解其大概位置即可。”顾红日说。
可靠、精准地将药物递送到目标位置是微纳机器人的难点,即便有非常好的控制方案,但对微纳机器人来说,一旦“走失”或脱离了原本的工作范围,对人体来说都是一种危险的情况。
从实际应用的角度来看,如果微纳机器人不可控,那么可能会出现像脱落的血栓一样随着血液飘走,在肺中形成肺栓塞或在心脏造成心肌梗塞等情况,这些风险在应用中都是不可被接受的。
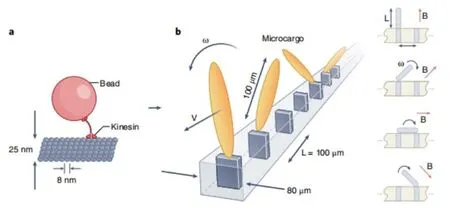
沿天然和人造微管运输。a,生物微管是由蛋白微管蛋白制成的极性圆柱形细丝,微货物被运动蛋白驱动蛋白单向拉动;b,人造微管是具有周期性磁性包裹体阵列的纤维,在外部旋转磁场的驱动下,磁性微型货物沿着这些纤维前进。注意这两种情况下不同的特征长度尺度。
该研究最重要的突破在于通过仿生人工微管方案,使微纳机器人递送药物变得更加可靠,并排除了微纳机器人可能飘走等不确定因素。“通过该方案,微纳机器人与人工微管周期性的互相强烈吸引,这就像是给微纳机器人的脚上穿上吸铁石,因此使用人工微管后微纳机器人在血液的一定流速范围内是非常稳定、可靠的。”顾红日说。
微纳机器人在人类血管内递送,相当于从大树衩向小树杈行走的过程,而通过人工微管,可以让它走得更深远、更准确,如果可多前进一步,就能让给药的精度提高一倍,减少药物对其他健康细胞和组织的副作用。
该研究历经约3年时间,对于该结果研究人员也颇为意外。“没做研究之前,我们没有想到结果会这么好,微纳机器人在同样的磁场转速下,速度提升至之前方案的10倍,并且还可保持稳定的运动。”顾红日说。
他表示,如果有一排马达蛋白,它们都往一个方向拉,这个速度就会变得更快。“我们在实验中也有类似的发现,所以和生物系统的互动即便是完全不同的机理,但是却有一定的相似度,从基础学科角度看这个发现也非常有趣。”
离产业化尚有距离,有望应用于递送药物

磁性颗粒在人工微管上的自主装和团簇
精准医疗、智慧医疗是近年来较多地被提及的词语,微纳机器人未来如果落地应用,那么以部分自动化来解放医生繁重的工作压力、节省医生手术时间方面将发挥重要的作用。
磁场驱动系统一个较大的优势在于,不需要医生在手术现场,可通过手术机器人进行相关手术。这样避免了医生穿着厚重的铅衣,并减少 X 光线对他们长年累月的辐射。
目前,该人工微管技术尚在实验室阶段,距离产业化还有段距离。接下来,该团队将一步步做相关的动物实验和临床的实验。顾红日认为,未来将微纳机器人在临床应用,必然离不开与医生共同探索,然后进行各方面的改造与升级,将该工具用在某种疾病的具体治疗方案中。
顾红日也坦言,微纳米机器人的产业化之路仍然“任重道远”,他说:“微纳机器人在医疗的应用是很明显的方向,目前科研界也在向这个方向努力。但是实际上,打通科研与应用的链条非常长,需要耐心地探索和研究。”
与此同时,微纳米机器人还面临与常规医疗方案竞争、相关部门的监管审查等实际的问题。
从机电工程、医疗工程再到物理研究

布兰德利·尼尔森教授
对很多科研问题都感兴趣,同时也有很多想法,他认为跨领域完成一件工作是充满挑战和有趣的。
顾红日本科毕业于浙江大学机电工程系,在本科学习期间他还参加了东京工业大学的青年科学家交流计划,从事微纳加工和电共轭流体和微泵系统方面的研究。随后,他在苏黎世联邦理工学院完成了硕士及博士阶段的学习,师从布兰德利·尼尔森教授。人工微管技术是他在博士期间的研究成果。
尼尔森教授作为业内最早开始从事微纳机器人的研究学者之一,顾红日也深受其影响。“他会在研究中提出很多重要的方向,并且实验室的环境也非常多元,学术和应用方面的资源也丰富。”
据悉,近期尼尔森课题组关于磁控系统方面的技术也有新的产业化动态,他们成立了初创公司Nanoflex,并将这种磁性可操纵导管用于中风治疗。
目前,顾红日在康斯坦茨大学物理系从事博士后研究,合作导师为克莱门斯·贝欣格教授,研究方向是活性的驱动和仿生。
从医疗工程方向转向物理研究,看似无关,但也有一定关联,实际上他所做的很多研究都与仿生相关。“对做工程的人来说,很多时候没有好的方案,就好会去看大自然是如何解决的。深入地理解生物系统能让我们设计更好的方案去解决现实的挑战”他说,正因为这样从机理上去发现和解决问题也是他的兴趣所在,所以现在去研究更多有趣的问题、去探索那些看似疯狂的想法。
猜你喜欢
——水芹主要害虫识别与为害症状
长江蔬菜(2022年13期)2022-07-29
石油沥青(2020年1期)2020-05-25
民族音乐(2019年5期)2019-11-19
陶瓷学报(2019年6期)2019-10-27
文苑·经典美文(2018年4期)2018-04-17
军事文摘·科学少年(2017年4期)2017-06-20
现代传输(2016年4期)2016-12-01
中外医疗(2016年15期)2016-12-01
新医学(2016年8期)2016-02-20
中国农资(2015年4期)2015-01-31
