垂直发射航行体水中点火燃气后效分析与研究∗
2022-03-14 15:18李智生
舰船电子工程 2022年2期
李智生
(91550部队 大连 116023)
1 引言
对于采用水中点火的垂直发射航行体而言,通过及时对航行体的水中弹道和姿态进行控制,可提高航行体在水中运动的稳定性,并有助于获得有利的出水姿态,从而增强航行体出水后的姿态控制能力[1]。通常,水下发射航行体在其尾部离开发射筒口一定距离处点火进行发射。如果航行体尾部与发射筒口距离较近处点火,则发动机可以利用从发射筒内溢出并附着在航行体尾部的燃气泡,作为发动机喷流建立初期燃气的受纳空间,减轻发动机直接在水中点火所造成的冲击,提高发动机工作安全性,但是由于水下点火处距离发射平台较近,发动机高速喷流会对筒盖及周围发射平台结构产生破坏,影响后续发射[2]。如果航行体远离发射筒口处(简称筒口)点火,附着在航行体尾部的燃气泡体积变小,同时燃气泡内渗人水,发动机若直接在此环境中点火,由于水的巨大惯性,则发动机喷流会受到水的阻碍,导致喷管内压强过高,从而威胁发动机工作安全性[3~4]。显然,在决定采用水中点火方案时,必须明确水中点火对航行体载荷的影响,并充分估计水中点火对发射筒及发射平台所造成的威胁[5~6]。
本文在构建垂直发射航行体水中点火数值仿真模型的基础上,研究航行体水中点火过程中尾部流场变化情况,分析不同点火深度下发动机射流流场对发射平台壁面压力和温度的影响,同时对水中点火燃气后效进行估计。
2 控制方程
建立水下发射过程中的航行体动力模型,通过实时求解航行体受力,通过动力学方程求得加速度和角加速度,然后进行数值积分,获得航行体当前速度、位移及姿态等。航行体受力如图1所示,图1中oxyz为发射坐标系[7],相对于地球静止,ox1y1z1为航行体坐标系,固联于航行体;v为航行体运动速度;F为航行体所受的浮力;G为自身重力;f为航行体轴向阻力;ox1为航行体轴向,ox1与v的夹角为α;oy1与v的夹角为θ,T为发动机产生的总推力;ϕ为发动机喷管为纠正航行体出水姿态而偏转的摆角。
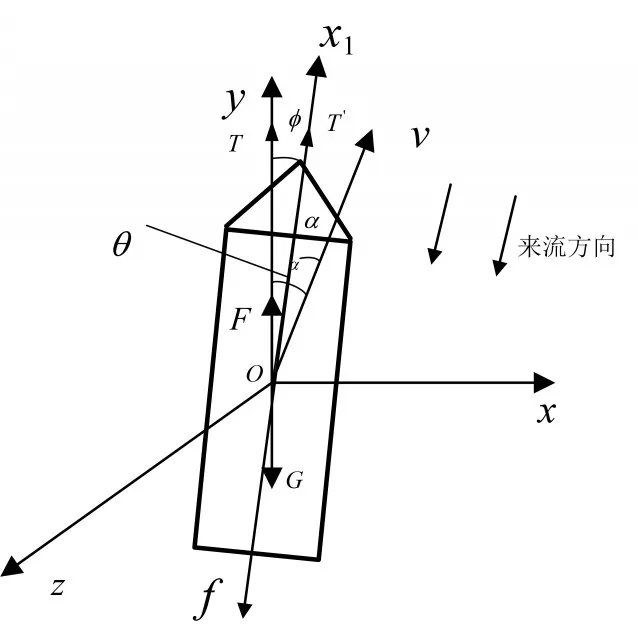
图1 发射坐标系
航行体在水下发射过程中,首先利用高压燃气将航行体弹射出筒,航行体尾部离开发射筒后,筒内燃气进入外界环境,与周围的水汽混合并附着在尾部形成燃气泡。发动机接收到点火指令后,航行体运动的发射动力主要由两部分组成:弹射力和发动机提供的轴向推力。
航行体在水下发射过程中,其航行体动力模型为[8]

其中:

式中:t为航行体运动时间,F'为发射筒高压燃气弹射力,T'为发动机点火后航行体受到的轴向推力,m为航行体质量,s为航行体的迎流面积,C为阻力系数,ρ为海水密度,λ为附加质量;α和θ值利用航行体加速度计测量的各个方向的加速度值进行解算求取。式(1)中的航行体运动参数值为后续计算燃气后效参数提供动态输入。
3 模型建立
3.1 计算区域及网格划分
CFD计算模型具体采用二维轴对称的无限长圆柱体模型。CFD求解器计算域如图2所示。网格划分的原则是,全部流场区域采用结构化网格。该方式能够消除计算结果对网格的依赖性[9~10]。在划分喷管时,在轴向方向、喷管及尾部附近处的网格大小接近一致。外场划分梯度网格,靠近航行体位置网格细密,远场较为稀疏。按照以上要求划分网格,得到航行体尾部局部网格如图3所示。
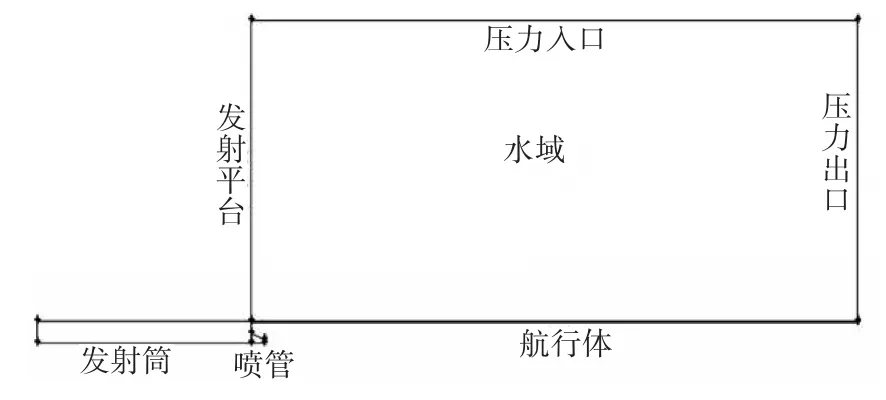
图2 CFD求解器计算域
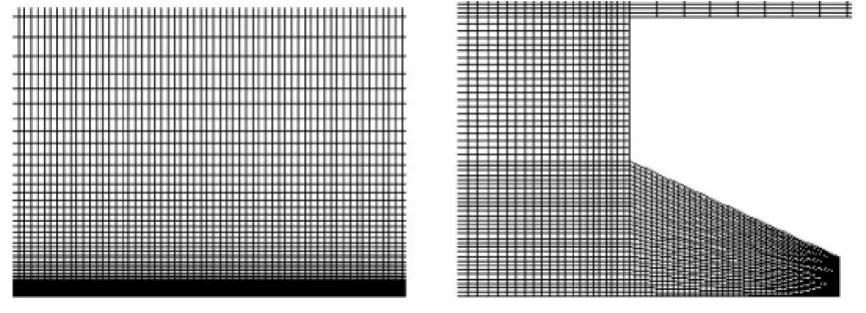
图3 航行体尾部局部网格
将式(1)和式(2)所示的航行体动力模型输入到CFD求解器中,利用CFD求解器对航行体水下运动参数进行求解。在得到航行体运动参数后对网格节点参数进行更新,进而对航行体能量方程及控制方程进行数值离散求解,最终得出航行体近体流场压力及温度分布参数。由于模型的对称性,计算域模型采取二维轴对称模型。在建模时不考虑航行体尾部产生的空化现象,且由于研究的是尾部流场变化,头部对仿真流场的影响较小,因此将计算模型简化为尾部只有喷管扩张段的无限长圆柱体[11]。
3.2 计算方法
采用Mixture多相流模型对流场进行求解,其控制方程基本形式如下[12]:


式中,ρm为混合物密度:

式中,αk为第k相的体积分数。利用Mixture多相流模型进行求解时,分别设置了主相(Primary phase)和副相(Secondary phase),所有相体积分数之和为1,副相可为多个,对于副相p的体积分数求解方法为
动量方程是牛顿第二定律在流体动力学中的体现。对于Mixture多相流模型的动量方程,可通过将所有相各自的动量方程相加的方法获得,其表示式为

式中,n为相的序号,为体积力,μm为混合物相的粘性,其表达式为

能量方程是能量守恒定律在流体动力学中的体现,Mixture多相流模型中混合物的能量方程为
式中,keff为有效传导系数,表达式为

其中,kt为湍动热传导系数,kk为第k相的湍动能,其取值取决于所选择的湍流模型。式(13)右端项中第一项代表了传导引起的能量迁移,SE为其余的体积热源项。
对于可压缩流动,Ek的表达式为

对于不可压缩流动,表达式为

其中,hk为第k相的焓。
上述偏微分方程组,包括式(3)~式(16),通过网格节点在计算域流场内进行离散化求解,具体步骤如下:
1)在计算过程的每个时间步,利用CFD方法联合求解Mixture模型控制方程、动量方程、能量方程和航行体动力模型,获得流场和航行体运动参数,通过更新网格将二者进行耦合,计算完毕后转入下一时间步;
2)当第一步得到的速度在局部不满足连续方程时,从连续性方程和线化动量方程推导出压力校正的泊松方程,然后解出压力校正方程,获取压力和速度场;
3)用上一个时间步长更新的、除了压力速度和温度外的其它变量值,解出湍流、能量和辐射等标量;
4)当存在相间耦合时,用离散相轨迹计算来更新连续相的源项;
5)根据计算的残差曲线检查设定方程的收敛性,当所有变量的残差值都降到10-3时,就认为计算收敛,即完成了对压力和温度的离散求解。
3.3 计算设置
表1给出了一组计算初始参数设置。

表1 主要参数设置
在水域边界设置中,初始压力输入数值通过重力梯度法获得。重力梯度法就是根据远场边界网格节点坐标和航行体发射水深来计算原场边界压力输入的方法。设标准大气压为P0=101325Pa,重力加速度g=9.81m/s2,海水密度ρ=1.02kg/m3,则初始远场压力总压,简称为总压,为P=P0+ρgh,其中,h为压力边界网格节点高度与航行体发射深度的差值。总温及回流总温初始值由发射筒内温度传感器读取。
在CFD模型设置中,湍流模型采用RNGk-ε,可以达到较好的收敛性;由于流场变量在壁面附近存在很大梯度的流动,因此壁面函数采用非平衡壁面函数法;流场初始化过程中,先对整流场按表1进行参数初始化,而后标记出全部为水的区域并对此区域按表1中初始项给出的参数修正,再迭代计算;在计算步长选择上,首先保证计算精度,其次要保证单时间步迭代计算的收敛性,最后要考虑计算的经济性。
在对航行体近体流场进行离散求解后,即可得出流场属性的关键参数(如压力、密度和温度等)。
4 仿真计算与结果分析
不同位置点火时,发动机喷管所黏附的燃气泡体积不同,如果燃气泡内点火,则可以起到缓冲作用,从而减弱对航行体、发射平台的冲击载荷。仿真计算中,通过设置不同的点火距离,分析燃气后效中压力和温度对发射平台壁面的影响。
采用如表1所示的参数来设置CFD计算模型。假设发动机距筒口点火的距离分别为2.2、4.3、6.5(数值进行了无量纲化处理),对应时间为0.4、0.6、0.8(数值进行了无量纲化处理)。在点火时刻,Fluent设置中将喉部的边界wall改为压力入口(PressureInlet),通过Fluent自定义函数(UDF)定义航行体质量和转动惯量等参数,通过网格节点离散求解航行体水动力及压力等参数,湍流模型选用增强RNGk-ε模型,计算迭代步长为1E-5。
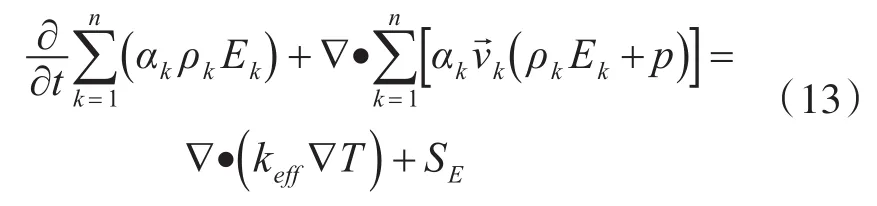
通过自定义函数UDF设置压力监测点位置,得到的发射平台壁面的压力与温度的变化规律曲线分别如图4和图5所示。从图4中可以看出,发射平台壁面各个测点的压力脉动变化规律基本一致,且离筒口中心越远,脉动幅值越小,当t>0.7后,压力值基本维持在当地水深压力的0.55倍;在点火后,测点Pb1的压力值出现3次压力峰值,这是由于Pb1是发射筒与发射平台壁面的交界点,发动机燃气射流与发射筒内高压燃气同时对Pb1产生作用。图5所示,发射筒中心处各个测点的温度变化规律趋于一致,温度分布符合热传导规律,有明显的滞后,从筒口开始自上而下,温度降低;在发动机点火发射开始后,测点P1的温度瞬间升至3000K,其他测点温度也逐渐升高;其后又出现两次温度波动,其峰值要远低于第一次,期间出现温度降低的原因是:取两个典型时刻t=0.231s和t=0.471s,在密度云图6中这两个时刻的温度云图和流线图也可以看出,此刻燃气泡几乎处于闭合状态,燃气温度无法传递。
图4 发射平台壁面不同测点压力变化图
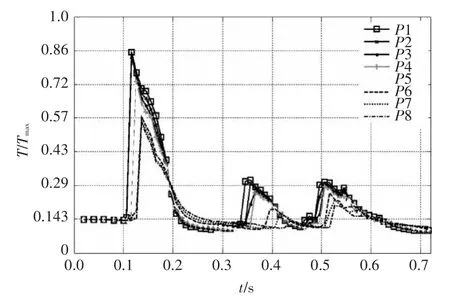
图5 发射平台壁面不同测点温度变化图
5 结语
本文基于Mixture多相流模型、动网格技术及三维轴对称模型,建立了航行体水中点火数值仿真模型,仿真计算得到了不同点火深度条件下燃气后效中压力和温度的变化特性数据,结果分析表明,发射平台壁面各个测点的压力脉动变化规律基本一致,且离筒口中心越远,脉动幅值越小;温度分布符合热传导规律,有明显的滞后,从筒口开始自上而下,温度降低。研究结论能够为航行体水中点火时机的选择提供决策依据,可为发射筒筒口流场分析提供数据支撑。
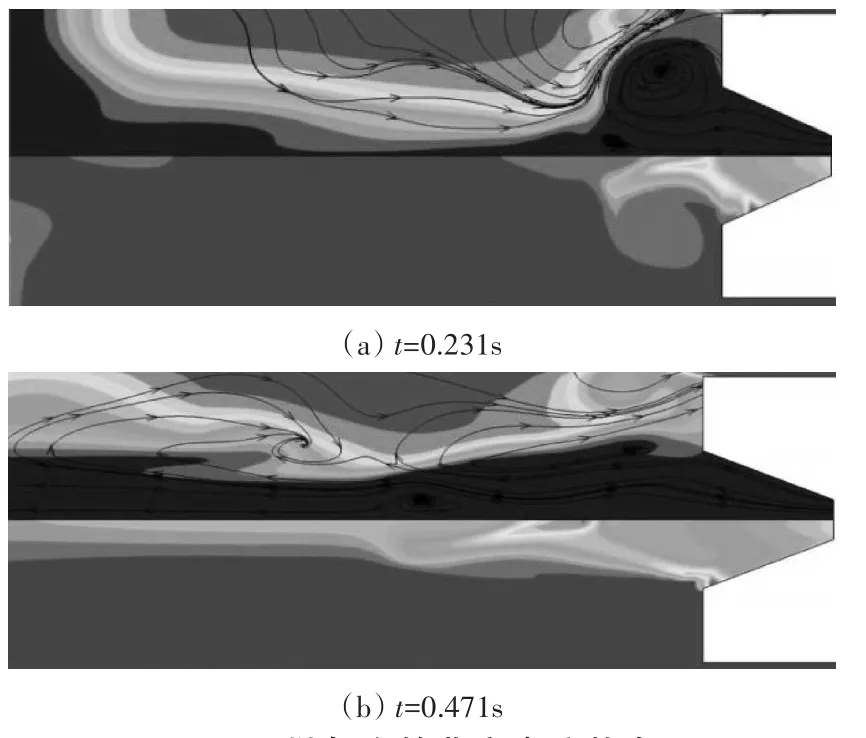
图6 燃气泡的非定常流状态
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
农业工程学报(2022年12期)2022-09-09
煤气与热力(2022年4期)2022-05-23
煤气与热力(2022年4期)2022-05-23
中国新通信(2022年3期)2022-04-11
农村百事通(2021年9期)2021-09-24
舰船科学技术(2021年12期)2021-03-29
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
振动工程学报(2019年2期)2019-05-13