
基于CAN总线的三轴步进运动控制平台设计*
2022-03-21 07:25大连大学信息工程学院葛家安胡玲艳王维壮毛银杰
数字技术与应用 2022年2期
大连大学信息工程学院 葛家安 胡玲艳 王维壮 毛银杰
工业4.0和中国制造2025已成为当今热点主题,自动化生产产业的迅速发展与崛起极大地提高了生产效率,PLC与运动装置的广泛使用,将人从繁重的劳动中解放出来。同时伴随着现场总线技术的发展,传统的信号传输方式逐渐被现场总线数字技术所代替,使现场设备级组网更加快捷、高效。CAN总线为运动控制系统各节点之间实现实时、可靠的数据通信提供了有力的技术支持。本文基于CAN总线自主设计的多轴运动控制系统,利用多主方式、非破坏性仲裁技术、CRC校验及实时错误校验等技术,完成现代多轴运动控制系统的总线集成,通过CAN总线与PLC可控制多个步进电机同步、精确运动,性价比高,对实际工业定位系统具有较强现实意义。
近年来,国内开始引进多轴运动控制系统,尽管一些研究数控设备的厂商开始研制运动控制系统,但研制出来的系统仍不属于独立的精确运动控制产品,我国到21世纪国内才开始多轴运动控制系统的研发和推广,并逐渐走向成熟和规模化。当前,运动控制技术日益受到世界各国的高度关注,德国的西门子、日本的三菱、中国台湾的台达等公司也研制出来了各式各样的运动控制产品,成为了机电一体化的关键技术。
1 系统概况
本文利用CAN总线自主设计多轴运动控制系统,选用三轴步进驱动模块及电机,基于CAN总线技术,采用西门子S7-1200PLC对步进三轴电机的精确控制进行设计,通过西门子TIA博途编程软件编写程序,在参数设置方面,系统由昆仑通泰MCGS触摸屏实现组态监控与人机交互,针对不同的功能动作,设置不同的参数,并显示监控的参数状态。针对系统控制,有控制面板实体按键和触摸屏组态按键两种不同的方式实现对PLC控制信号的输入进而实现对三轴步进电机运动的启动,停止与复位。整个系统使用CANopen总线进行网络的构建,搭建起PLC与运动部分的通信通道。通过TIA博途编程软件进行编程并下载到设备,通过上位机对参数读取与写入,实现对系统进行控制,以达到精确点位控制的目的。
1.1 系统控制流程
系统利用西门子PLC的各功能模块实现综合控制,结合上位机、人机界面实现对整个系统实施系统化监控管理。PLC作为系统的控制器,结合各功能模块实现对步进电机驱动器的直接控制,间接实现对步进电机的控制。系统通过光电传感器以及控制按钮产生的信号作为PLC输入信号,经PLC输出信号至步进电机驱动器,在由驱动器产生信号驱动步进电机。系统总控制流程图如图1所示。
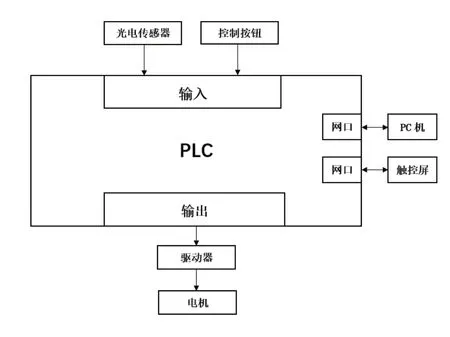
图1 系统总控制流程Fig.1 Overall control flow of the system
传统的运动装置如果要用PLC对一个步进驱动器进行控制,除必要的电源线和电机驱动线之外,最少还需要接多根线才能使一台步进驱动器正常工作。并且,要想对整个系统的运行状态进行监控,则每个步进驱动器还要额外再接多根线,可想而知,会造成工作量的加大,增加工作时间和空间上的资源占用,造成资源的浪费。
若在传统的运动装置上采用CAN总线的技术进行控制,在装置上连接的几十根线就可以换为1根CAN通讯线,通过CAN总线方式连接进行控制,这种控制方式不光能对系统进行控制,而且还能监控系统的实时状态,大大减少了线束的限制、时间的浪费以及空间上的节约,避免了资源的浪费。
1.2 步进电路设计
根据步进的电气要求,给步进驱动器供24V的电源使驱动器正常工作。给驱动器的P+端口和R+端口同时供给5V电源,使驱动器能够识别脉冲来控制步进电机工作。给驱动器的P-连接PLC的Y0输出,来接受脉冲数指令;给驱动器的R-连接PLC的Y1,来接受脉冲方向指令,P-与R-共同作用来控制步进电机的正反转以及运行时的速度和加速度。
1.3 PLC电路设计
根据PLC的电气要求,要给PLC供24V电源使PLC正常工作;将CAN通讯口与驱动器连接,进行数据操作。将Y0与Y1连接到步进驱动器上,给步进驱动器提供脉冲。最后将输入点X接到开关上,来控制电机的正反转。
1.4 CAN总线的优势与利用
CAN总线被细分为CAN总线数据对象层(The Object Layer)、CAN总线数据传输层(The Transfer Layer)和CAN总线物理层(The Physical Layer)三种结构层次,具有如下优点:
(1)CAN总线的工作方式为多个主站共同工作的方式,即不分主站和从站,通信方式比较灵活。
(2)CAN总线节点数据信息根据标识符的大小被分成不同的优先级,可满足系统对数据的实时性的要求。
(3)采用仲裁技术,当总线中同时存在有多个数据信息时,根据标识符所定义的数据信息的优先级的高低,从优先级高到低次序依次发送数据信息,使总线避免出现因数据信息超载而出现的网络瘫痪的情况且使CAN总线具有非破坏性仲裁的功能。
(4)CAN总线的报文可以实现一对一发送、一对多发送、全局广播发送方式。
(5)CAN总线的通信速率最高可达1Mbit/s,此时通信距离为40m。
(6)CAN总线的节点数取决于驱动电路,在总线中目前最高可以达到接110个节点,过远距离的传输可以使用CAN总线驱动器进行驱动。
(7)CAN总线采用短数据帧结构,数据信息传输的时间短,抗干扰能力强,检错效果好,能很好地保障总线传输的数据的准确性。
(8)在CAN总线出现严重错误报警时,总线还可自动关闭输出功能。
本文充分利用CAN总线的技术优势,实现不同驱动设备之间的总线通信,实时性、可靠性强,节省设备I/O点的资源。CAN总线中具有的CRC校验场最大程度的保证了传输的数据不会出现错误。CRC校验场场包括CRC序列、CRC界定符。CRC序列由循环冗余码求得,其中,CRC界定符只包含了一个隐性的Bit,发送、接收数据场的最后一位,CRC-RG包含CRC序列。
2 创新性设计
步进电机是靠接收脉冲电流来实现速度、位置和方向的控制,脉冲的多少决定步进电机的位置,脉冲的速率决定电机的转速,脉冲的方向决定电机的转向。现在大多数步进电机的控制方式就是用PLC发脉冲给驱动器,驱动器驱动电机运转。脉冲型方式已经存在了几十年,对于一些应用要求比较高的场合,如在运动过程中需要力矩模式,脉冲型是无法对电机电流做到控制从而调整力矩,而总线型就可以做到。脉冲型已经不能满足需求,需要总线型来控制。
系统需要使用多个步进电机的,如果使用脉冲型一是不好控制,一个PLC最多也就可以控制六七个轴,电机一多就需要多个上位机,对空间体积要求比较大,而大多医疗器械体积就比较小巧紧凑,二是电机多了脉冲型布线很难,线路一多就存在信号干扰问题导致设备不稳定。如果使用总线型就只需要两根信号线和电源线把所有电机串联起来,设计和安装都非常方便,也不会存在大量布线的信号干扰问题。
总线型方式相对于脉冲型不仅仅是体积上面小巧很多,控制程序的编写也会相对于PLC梯形程序简单许多,而且还能做到电机电流、电压、温度、堵转等的时时反馈,电流、细分的时时改变,s形加减速、模拟量、同步指令、离线控制等的简单控制。总线型对于脉冲型来说有很多新的功能特点,总线型是未来步进电机运动控制的发展方向和趋势。系统设计硬件如图2所示。
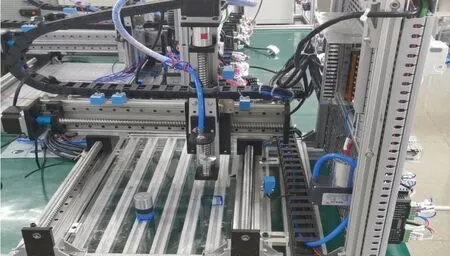
图2 设计实物图Fig.2 Physical design
3 结语
本文基于CAN总线技术采用西门子PLC控制步进电机实现运动平台进行设计,考虑实现多种不同功能,进行选材设计。研究了在多轴运动控制系统中应用CAN总线技术是具有可行性的系统。对比于传统的多轴运动控制系统,大大节约空间和时间,减少了资源的浪费,同时增大了系统的可扩展性。使用CAN总线的系统对比传统的系统,也增加了实时性、可靠性及控制方式的灵活多样性。本设计可节省系统I/O点的资源,不再局限于控制器的带负载量,进而系统有更强的扩展性,充分适应现代化系统的多样性与需求,也为后续对使用CAN总线的控制系统的研究提供了一定的研究参考。
猜你喜欢
数学物理学报(2022年3期)2022-05-25
电脑爱好者(2020年6期)2020-05-26
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
中成药(2017年12期)2018-01-19
光学精密工程(2016年5期)2016-11-07
上海电机学院学报(2015年3期)2015-02-28
电子设计工程(2015年8期)2015-02-27
计算物理(2014年2期)2014-03-11
河南科技(2014年16期)2014-02-27
