
基于参数修正的永磁同步直线电机改进电流预测控制系统
2022-03-23 08:14张团善郑灵瑜
轻工机械 2022年1期
杜 鑫, 张团善, 郑灵瑜
(西安工程大学 陕西省智能纺织装备研究院, 陕西 西安 710048)
永磁同步直线电机(permanent magnet synchronous linear motor, PMLSM)相对于传统的旋转电机,减少了中间的传动机构,因此直线电机具有快速响应、高加速和高控制精度的优势。模型预测控制(MPC)因其原理简单、瞬态响应快、处理非线性约束和多变量控制的灵活性而受到越来越多的关注[1-2]。
高精度的永磁同步直线电机的控制系统主要包括位置环、速度环和电流环。电流环是整个控制系统的核心部分,因此电流环对动态性能有更高的要求。电流预测控制(Predictive Current Control,PCC)可以保证零静态电流误差和高动态响应,因为控制器中的参数与真实的被控对象完全一致[3-4]。但是,在实际应用中,电机参数在不同的工作情况下会发生变化。例如,定子和转子电阻会随着温度变化而变化。当电流预测控制器中设置的电机参数与其实际值不一致时,会使计算出的电压矢量不是最优的,降低了整体控制性能。为了解决这些问题,现有文献研究了几种提高鲁棒性的方法,包括自适应干扰观测器[5-6]、扩展状态观测器(ESO)[7-8]和无模型控制(MFC)[9-10]。基于现代控制理论,可在很大程度上保持PCC的优越性能,并明显提高鲁棒性。
针对参数不匹配问题,课题组提出一种新的改进电流预测控制算法,并结合参数修正器,建立一种降低速度稳态波动,消除由系统扰动引起的稳态电流和暂态误差的PMLSM的双闭环控制系统模型,并对该模型进行仿真,取得良好的控制效果。
1 永磁直线同步电机数学模型
永磁直线同步电机是由永磁体产生的磁场和三相对称绕组生成的行波磁场的相互作用力推动次级动子进行直线运行,故该系统是多变量非线性的。考虑由参数变化和未建模动态引起的干扰,PMLSM的电压平衡方程在d-q轴同步旋转坐标系中表示为:
(1)
式中:R为定子电阻;τ为直线电机极距;Ψf为永磁体磁链;uq,ud分别为d轴和q轴的电压分量;iq,id分别为q轴和d轴的电流分量;Ls为q轴和d轴的电感分量;dq(k)和dd(k)为因参数不匹配和未建模动态引起的扰动电压。
根据式(1)d和q轴电压方程,可得出离散化的电流模型:
I(k+1)=G·I(k)+H·(V(k)-λ(k)-D(k))。
(2)

式中:Ts为采样时间;k为离散采样时间;iq(k+1),id(k+1)分别为第k+1个周期q轴和d轴的电流分量。
电机在运行过程中参数会发生改变(如温度变化导致电阻、电感等参数改变),由式(2)可知q轴和d轴的电压总扰动分别为:

(3)
式中:ΔR=R-R0,ΔLs=Ls-Ls0,ΔΨf=Ψf-Ψf0,εd和εq为系统未建模动态引起的干扰,R0为电机的实际电阻,Ls0为电机的实际电感,Ψf0为永磁体实际磁链,ωe(k)为第k个周期时电机的电角速度。
在传统的电流预测控制器下,只有控制器的参数和电机实际参数一致时,才能保证高动态响应和零静态电流误差。在电机参数与控制器参数不一致的情况下,为提高系统的鲁棒性,需要准确得出q轴和d轴的扰动量D(k)。
2 电流预测控制及改进
2.1 带延迟的预测控制
在自然坐标系下的三相电流ia(k),ib(k)和ic(k)通过Clark变换为α-β轴静止坐标系中的电流iα(k)和iβ(k),然后通过Park变换为d-q轴同步旋转坐标系下的电流。传统电流预测控制原理是根据电流参考指令I*(k+1)和采样电流I(k),根据式(2)所示的离散化电压模型,可以得到第k采样周期的电压参考指令V*(k)。
V*(k)=H-1·[I*(k+1)-G·I(k)]+λ(k)。
(4)
理论上若将电压参考指令V*(k)施加在电机上,经过1个采样周期后,电机的采样电流I(k+1)可以跟踪上参考电流I*(k+1)。因电流采样以及控制算法执行会造成控制延迟,导致计算的指令电压不能得到即时更新,采样电流I(k+2)在第(k+1)个周期结束时才能跟踪上参考电流I*(k+1),从而使q轴和d轴电流产生较大的误差。此时电流预测控制的工作原理如图1所示。
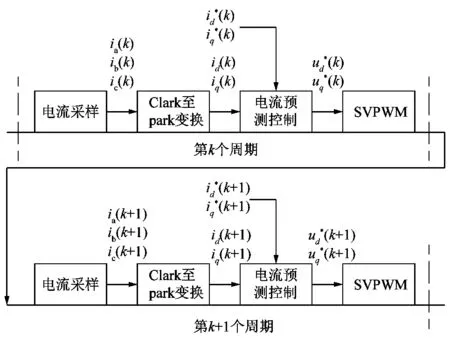
图1 传统电流预测控的工作原理Figure 1 Working principle of traditional current predictive control
为了消除延时的问题,课题组采用2步电流预测控制,第k+1个周期的指令电压为:
V*(k+1)=H-1·[I*(k+2)-G·I(k+1)]+λ(k+1)。
(5)
式中I(k+1)为第k+1个周期的采样电流,现用第k+1个周期的估计电流Ip(k+1)来代替采样电流I(k+1),由式(4)可得:
Ip(k+1)=G·I(k)+H·(V(k)-λ(k))。
(6)
将式(5)代入式(6)可得出2步预测控制的指令电压方程:
V*(k+1)=H-1·(I*(k+2)-G·G·I(k)-G·H·(V(k)-λ(k)))+λ(k+1)。
(7)
如果直接采用第k+1个周期的估计电流Ip(k+1)来代替实际电流I(k+1),会产生较大的电流预测误差,增大电机速度的稳态误差。因此采用一种改进的电流预测控制算法,通过参考电流I*(k)和采样电流I(k)的误差,以及参考电流I*(k+1)和预测电流Ip(k+1)的误差的平方根来优化预测电流Ip1(k+1)。
Ip1(k+1)=Ip(k+1)-
(8)

修正后的第k+1个周期的指令电压为:
V*(k+1)=H-1·[I*(k+2)-G·(Ip(k+1)-
(9)
这种方法可以有效地提高实际电流与指令电流的动态跟踪,提高系统的鲁棒性。
2.2 参数变化对控制器的影响
传统的电流预测控制器对电机的参数变化非常敏感。当电机长时间处于工作状态,其内部出现温度升高及磁路饱和等现象,使电机参数发生变化(如电阻阻值增大,导致电机性能降低)。为保证电流预测控制器的良好性能,引入参数修正器以提高系统的鲁棒性。
在理想状态下,V*(k)=V(k+1),从式(3)可知,当温度改变时导致R≠R0,则:
(10)
当I(k)>0时,若预测控制器参数R大于直线电机实际参数R0,扰动电压误差为正,即实际电压V小于参考电压V*;若预测控制器参数R小于直线电机实际参数R0,则扰动电压为负,即实际电压V大于参考电压V*。当I(k)<0时,扰动电压误差与参数误差的关系是反向的,如表1所示。
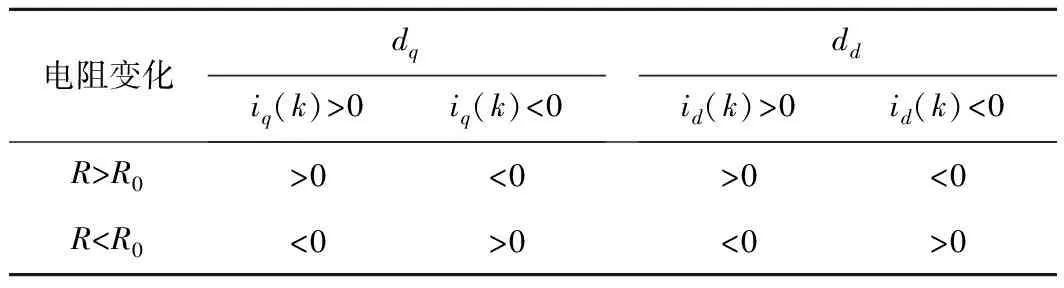
表1 参数R误差和扰动误差Table 1 Parameter R error and disturbance error
当磁路饱和时,导致电感Ls≠Ls0时,由式(2)~(3)可得:
(11)

当g(k)>0时,若预测控制器参数Ls大于实际参数Ls0,扰动误差为正,即实际电压V小于参考电压V*;若预测控制器参数Ls小于实际参数Ls0,则扰动误差为负,即实际电压V大于参考电压V*。当g(k)<0时,扰动电压误差与参数Ls误差的关系是反向的,如表2所示。
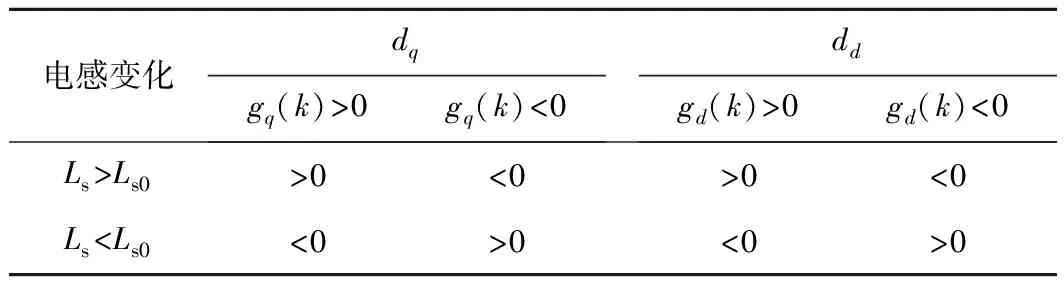
表2 参数Ls误差和扰动误差Table 1 Parameter Ls error and disturbance error
2.3 参数修正器
电流预测控制器参数R和Ls的误差会导致通过预测电流求取的指令电压产生误差D(k),严重影响了系统的性能,故通过参数调整器来调整预测控制器电阻和电感的方法,来提高系统鲁棒性。如图2所示,v*为电机的指定速度,v为电机的实际速度,当速度误差减小到0.003 m/s时,参数控制器将开启,在线调整电阻和电感的大小。在本研究中,通过上一时刻的采样电流求得指令电压V*(k)和实际电压V(k)的电压误差,根据式(9)~(10)算出相对应的参数误差后,可修正电流预测控制器中电阻和电感的参数,从而求出准确的电流预测值。

图2 电流预测控制器Figure 2 Current prediction controller
(12)
由式(10)可知:
(13)
式中Lss和Rss分别是电流预测控制器修正之后的电感和电阻。
3 系统模拟仿真分析
通过MATLAB对PMLSM进行电流预测控制仿真,永磁同步直线电机的参数为:电感Ls0=0.034 7 H, 定子电阻为R=2.6 Ω,永磁体磁链为Ψf=0.16 Wb,极距τ=20 mm。采样时间为Ts=1×10-6s。PMLSM的优化电流预测控制系统如图3所示,速度环采用PI控制器,电流环采用优化的电流预测控制系统,F为电机的输出转矩。通过仿真软件搭建传统的电流预测控制和改进的电流预测控制仿真模型,比较调速和变负载的情况下电机速度波形和q轴电流波动。
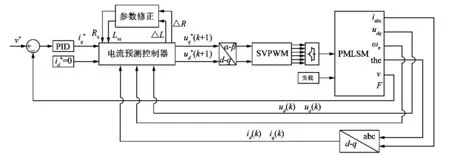
图3 采用参数修正的电流预测控制系统Figure 3 Predictive current control system with parameter correction
3.1 速度不变情况下改变负载
图4所示为在空载状态下,给定值速度为v*=1.000 m/s时,传统电流预测控制算法和本研究提出的改进电流预测控制算法下的突变负载的动态性能变化。在相同的电机参数情况下,初始启动时,传统电流预测控制下速度超调量为0.143 m/s,改进的电流预测控制速度超调量为0.106 m/s;在0.3 s时,负载突变为80 N,传统的电流预测控制速度降低到0.943 m/s,而改进的预测控制速度降低到0.952 m/s。由图4可知,在运行过程中突加负载,改进电流预测控制与传统电流预测控制相比,速度超调量更小。

图4 传统预测和改进预测速度仿真对比图Figure 4 Comparison of traditional prediction and improved prediction speed simulation
3.2 电机参数变化鲁棒性验证
为验证课题组所提出的参数修正方法在电机参数失配情况下的性能,选定电阻R0和电感Ls0作为测量对象。电流预测控制器的定子R分别设置为PMLSM参数的50%和140%;电感Ls0分别设置为PMLSM参数的60%和240%。
图5为预测控制器中的电阻R为0.5R0时,在负载突变的情况下,传统电流预测控制方法和带有参数修正的改进电流预测控制对应的q轴实际变化值。传统电流预测控制对参数不匹配较为敏感,在参数不匹配的情况下,q轴电流的波动约为±0.035 A;而改进的电流预测控制可以减小q轴的电流波动,电流波动约为±0.010 A。
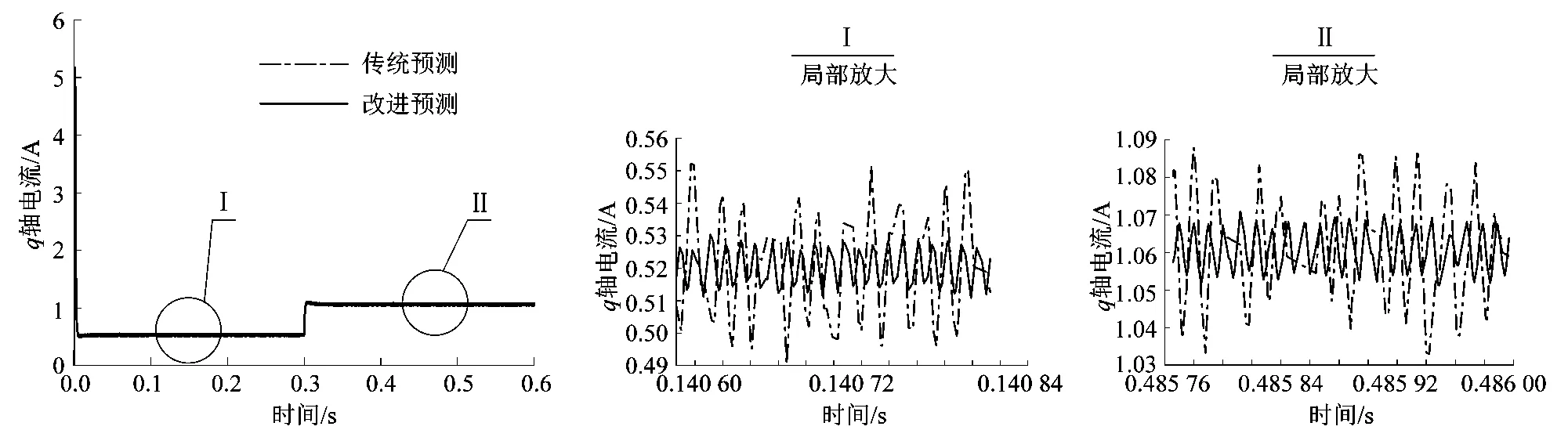
图5 R=0.5R0时q轴电流仿真对比Figure 5 Comparison of q-axis current simulation when R=0.5R0
图6为预测控制器中的电阻R为1.4R0时,传统电流预测控制方法和带有参数修正的改进电流预测控制方法对应的q轴实际变化值。由图6可知,在不同负载下,传统的电流预测控制q轴的电流波动幅值为±0.028 A;而改进的电流预测控制方法q轴电流波动幅值为±0.010 A。

图6 R=1.4R0时q轴电流仿真对比Figure 6 Comparison of q-axis current simulation when R=1.4R0
图7为预测控制器中的电感Ls为0.6Ls0时,传统电流预测控制方法和带有参数修正的改进电流预测控制对应的q轴实际变化值。由图7可知,在不同负载下,传统的电流预测控制q轴的电流波动幅值为±0.022 A;而改进的电流预测控制方法q轴电流波动幅值为±0.009 A。
图7 Ls=0.6Ls0时q轴电流仿真对比Figure 7 Comparison of q-axis current simulation when Ls=0.6Ls0
图8为预测控制器中的电感Ls为2.4Ls0时,传统电流预测控制方法和带有参数修正的改进电流预测控制对应的q轴实际变化值。由图8可知,在不同负载下,传统的电流预测控制q轴的电流波动幅值为±0.026 A;而改进的电流预测控制方法q轴电流波动幅值为±0.010 A。
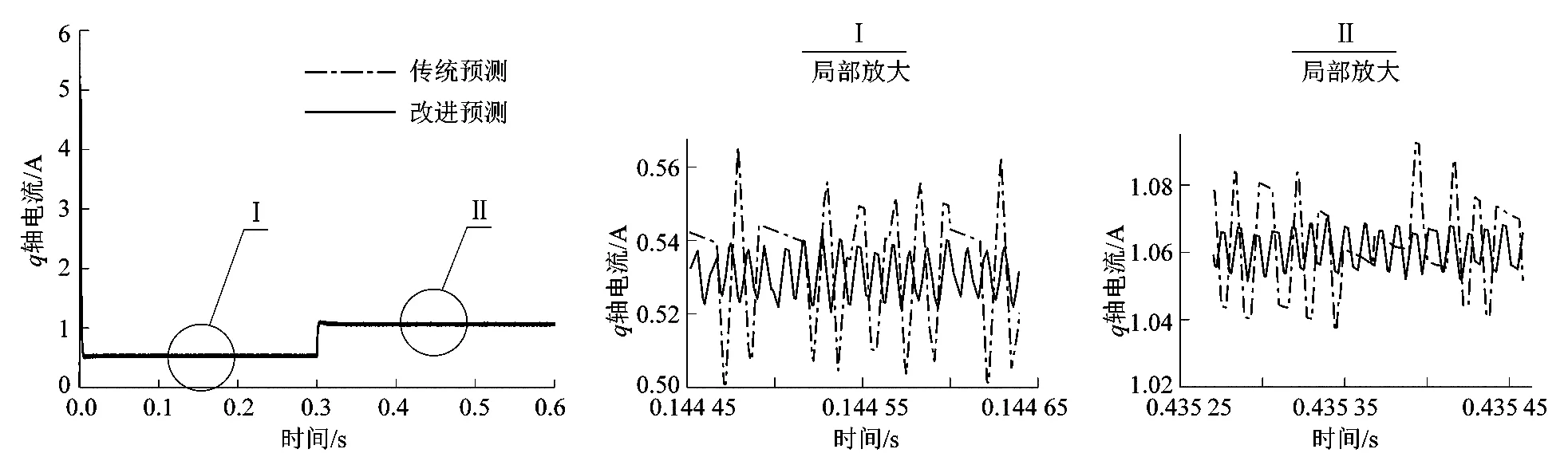
图8 Ls=2.4Ls0时q轴电流仿真对比Figure 8 Comparison of q-axis current simulation when Ls=2.4Ls0
上述结果表明:改进的电流预测控制可以有效地减少q轴电流波动,对速度稳态误差有良好的控制效果,改善了永磁同步直线电机推力的波动。
4 结语
针对参数失调导致PMLSM电流波动增大而对速度控制产生较大影响的问题,课题组采用双闭环控制系统,结合了参数修正的改进预测电流控制策略。该控制策略可以有效地减小电流稳态波动和速度稳态波动,同时解决电流预测控制器与电机参数不匹配的问题。仿真结果可以看出:该控制策略响应快、超调小,速度稳态状态下无震荡,显著提高了对电机性能的控制。该控制系统对于无负载的改善效果不明显,对于参数修正的稳定性有待进一步的提高。
猜你喜欢
纺织标准与质量(2022年4期)2022-09-05
电源学报(2022年1期)2022-02-25
煤气与热力(2021年12期)2022-01-19
汽车维护与修理(2021年24期)2021-12-23
通信电源技术(2021年9期)2021-09-23
电源学报(2020年3期)2020-06-28
电子制作(2019年13期)2020-01-14
学苑创造·C版(2016年10期)2016-11-19
中学生数理化·高二版(2016年5期)2016-05-14
中学生数理化·中考版(2015年10期)2015-09-10
