IEPE三轴传感器无线传输三维振动轨迹成像系统
2022-03-23 06:41曹宏睿吴国斌刘士兴张永强赵金龙
实验室研究与探索 2022年1期
李 强, 曹宏睿,, 吴国斌, 刘士兴, 张永强, 赵金龙
(1.合肥工业大学电子科学与应用物理学院,合肥 230009;2.中国科学院等离子体物理研究所,合肥 230031)
0 引 言
国际热核聚变堆(International Thermonuclear Experimental Reactor,ITER)计划是人类为解决能源问题而展开的重大国际合作项目,它将验证人类和平利用聚变能源的可行性,是世界上第一个以等离子体自持燃料为目标的聚变装置[1]。其中软X射线相机是ITER装置中一项重要的诊断系统,通过监测ITER装置运行过程中辐射的软X射线强度及分布,来研究等离子运行的不稳定性和杂质辐射等关键性问题[2]。软X射线相机的硬件系统包括探测器、前置放大器、中继放大器和采集系统等[3]。为保证装置在运行过程中各个等离子体诊断系统的安全和稳定,在诊断系统设计和测试的过程中需要在不同地板响应谱条件下保证其可靠性。需要在不同振动的工况下对软X射线相机系统进行振动监测,监测对象包括内、外部相机的探测器部分(含光路)以及电子学部分的组件[4]。在振动监测的过程中,需要对软X射线相机系统内部多种部件的三维振动状态进行实时监测并对振动幅度和频率进行精确的标定。目前振动加速度和频率的测量产品多以单轴为主且测量精度低;位移测量多以激光测量为主,测量分辨率虽然能达到0.1 mm但频率带宽不宽,且多以点面测量为主。以上两种方案在测量维度、频率和精度方面均无法同时满足软X射线相机振动测试的标定要求。该三维振动监测系统还要实现实时测量、无线传输、抗电磁干扰、远程升级等功能。根据项目需求研制一套用于软X射线相机振动台面实验的三维振动轨迹成像系统。系统还可用于发电机组的在线监测、缆车缆绳的监测和桥梁的监测等,通过监测被测设备的振动参数(加速度、速度、位移和频谱等),分析和判断设备的工作状态[5]。
1 系统结构及方案设计
三轴传感器无线传输三维振动轨迹成像系统主要用于分析软X射线相机在振动过程中的结构变化[6],设计包括传感器采集分析电路与无线接收端上位机软件两部分[7]。软X射线相机及电子学机箱测试原理如图1所示。
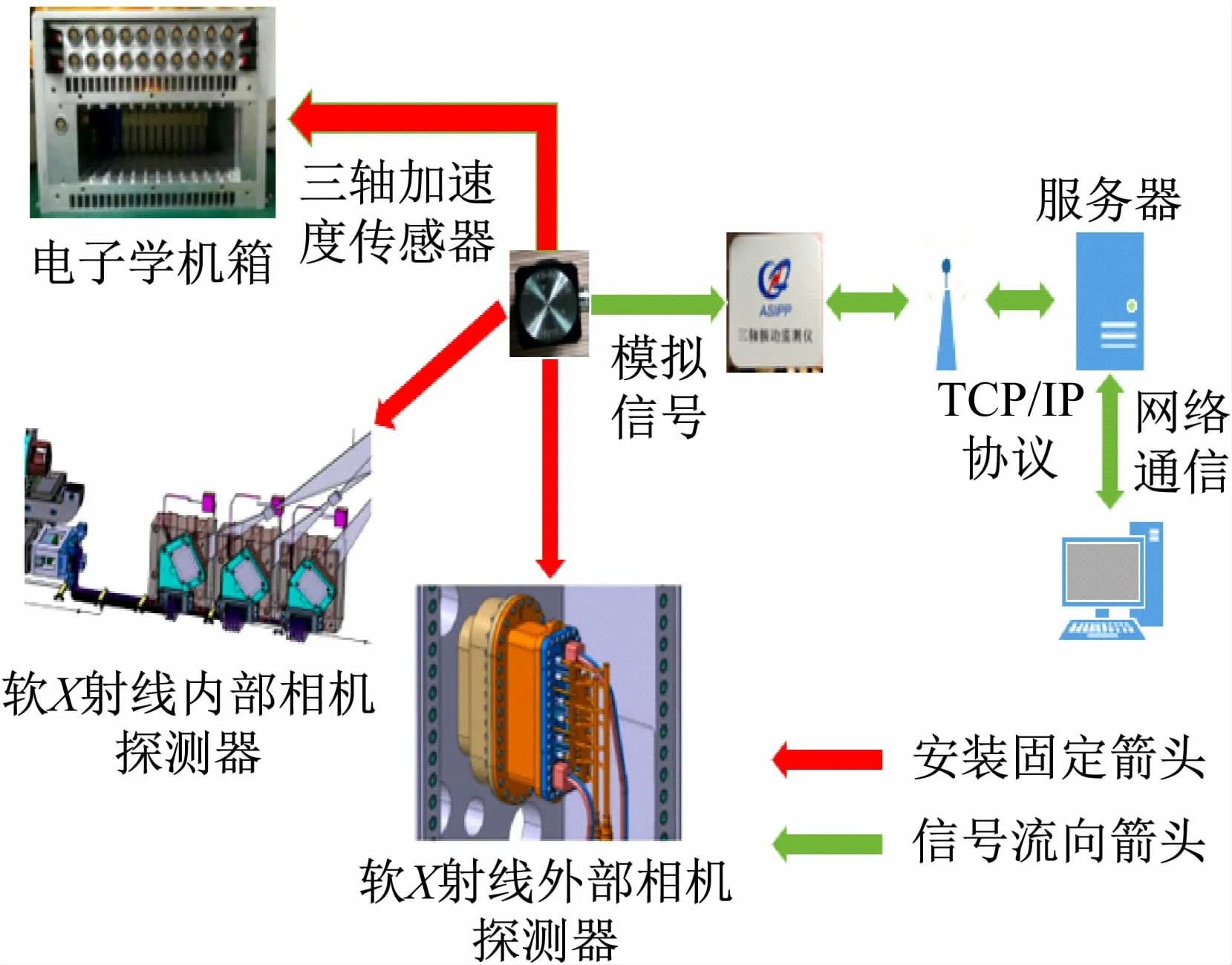
图1 软X射线相机及机箱测试原理
系统使用CA-YD-3193三轴加速度传感器作为振动信号采集器件,LM344为该传感器的供电芯片,并加入信号处理电路[8],以保证信号质量。使用STM32F429IGT6单片机为主控制单元,数据以无线传输为主,并包含上位机接收端。根据监测点的要求不同,使用了NBIOT和4G模块两种通信形式。上、下位机通过TCP/IP协议实现振动数据传输,硬件程序可通过远程在线升级功能实现远程更新。外壳采用防震、防水、防辐射设计,防水等级可以达到IP65。
传感器底部有强力磁石,可以吸附在相机的探测器壁上。传感器将采集到的数据经过信号处理电路发送到处理器,处理器再将数据通过无线传输模块发送到上位机进行数据分析并显示其振动状态。
2 硬件电路设计
当有振动信号输入时,传感器中的监测质量块移动使压电元件产生正比于输入加速度的电荷信号,电荷信号通过内置的电荷放大器转换为电压信号[9]。灵敏度为100 mV/g(g为重力加速度),测量范围为50 g,频率响应为1~4 000 Hz。下位机电路主要由传感器驱动信号处理、电源转换、锂电池供电、处理器以及无线传输等电路组成。
加速度传感器提供24 V 4 mA的一个输入,传感器将输出一个12 V上、下波动的信号。将信号加上1.65 V的偏置电压,加入二阶巴特沃斯滤波[10]如图所示2,滤波后的信号进入芯片引脚。

图2 传感器驱动信号处理电路
选择STM32F429IGT6为核心处理器,此处理器内置3个12 bit ADC,ADC的采样频率设置为1Ksps,通过配置ADC_CCR寄存器中的MULTI[4:0]位选择“规则同时模式”让3个ADC分别同步采集XYZ三轴的传感器数据,并将采集到的数据通过串口传输到无线模块。
无线传输模块根据不同待测对象的需求,使用NBIOT和4G两种通信模块,NBIOT模块功耗低,主要用于对采样频率要求不高,需要长时间测量的监测点,4G模块主要用于大批量数据的实时测量、传输。整体电路实物如图3所示。

图3 振动监测电路板
电源部分采用24 V外部供电和3.7 V锂电池内部供电,当外部24 V掉电后自动转换为内部锂电池供电。外部24 V电源主要为传感器提供工作电源,24 V转5 V为锂电池充电和电源管理芯片供电。5 V转3.3 V为STM32处理器及无线传输模块供电。
3 软件设计
该三维振动轨迹成像系统使用LabVIEW进行程序编写,完成振动信号的采集和处理,并给出被测物体的三维运动轨迹图像用来分析物体的状态变化及故障监测。软件流程如图所示4,软件结构主要包括数据收集、数据处理、三维成像、设备状态分析、数据存储和数据回显等功能[11]。系统软件设计如图5所示。
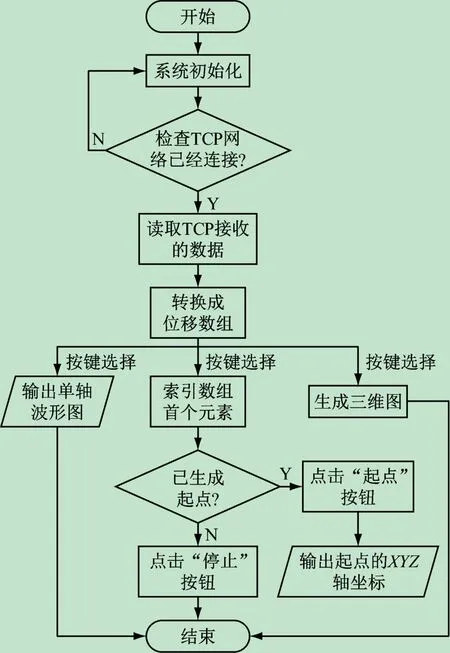
图4 上位机软件流程图
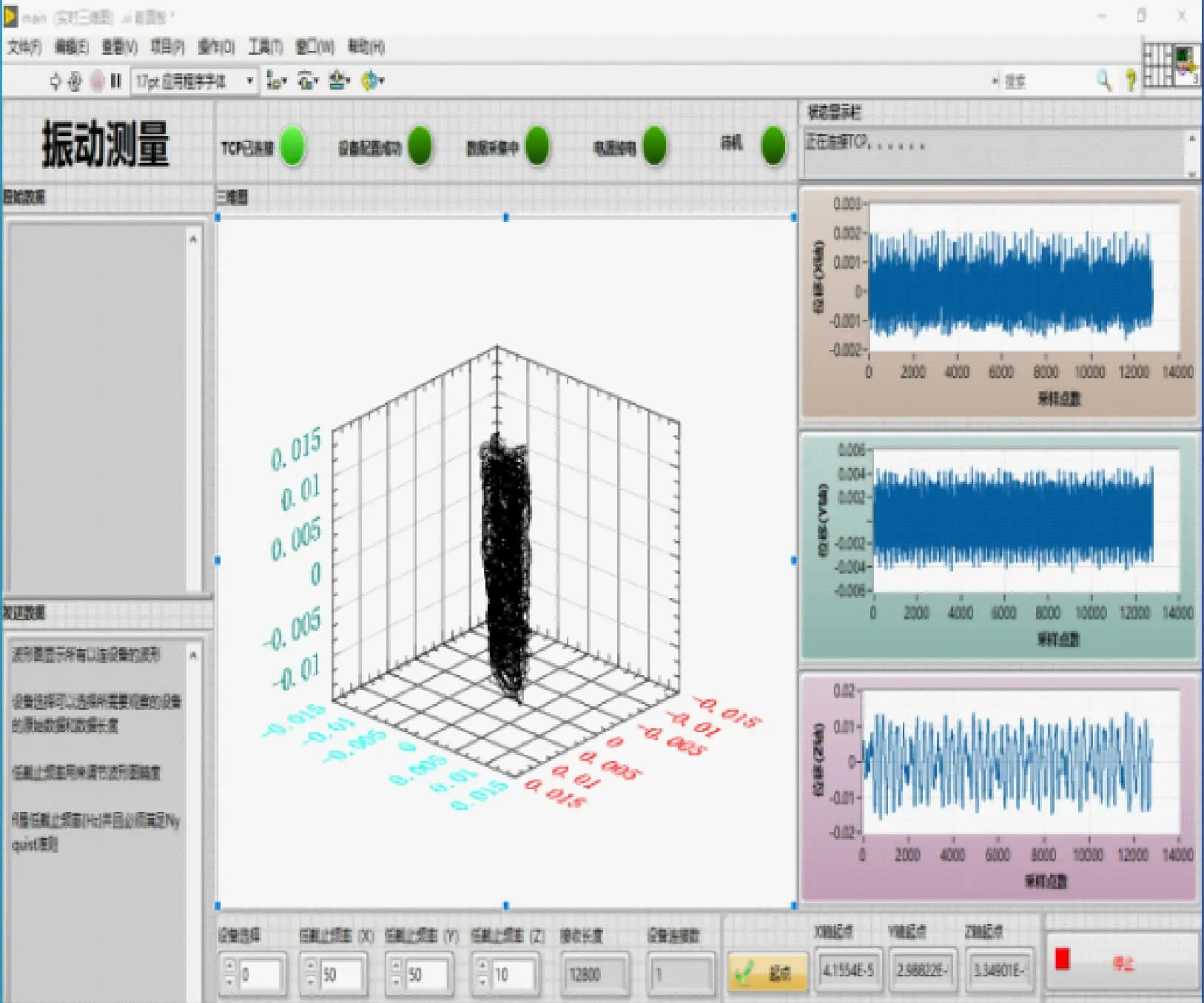
图5 上位机显示界面
下位机通过TCP/IP协议将下位机中ADC采集到的数据传送到上位机,上位机再将发送的数据按照XYZ 3轴方向进行提取。上位机将3个坐标轴的数据通过对应公式转化为加速度,速度,位移,再将X、Y、Z位移点组成空间位移点,在三维空间坐标轴上显示,然后实时描绘位移轨迹。

式中:a(t)为加速度值,mm/s2;x为下位机发送的数据(发送数据为ADC采集数据)。

式中:v(t)为速度值,mm/s。

式中:s(t)为位移值,mm。
该上位机软件提供状态提示,提示设备是否与对应IP端口连接,设备工作状态是否正常等。上位机还可将数据保存,向下位机发送指令等功能。
4 系统远程升级
由于部分振动监测的工作受到辐射影响,需要工程师远程进行嵌入式系统的BUG修复和软件升级,需要在下位机设计中加入了远程升级的功能[12]。根据用户需求进行改进,又可以节省维护服务的人力、物力以及时间成本,给系统维护带来很大的方便。升级过程如图6所示。
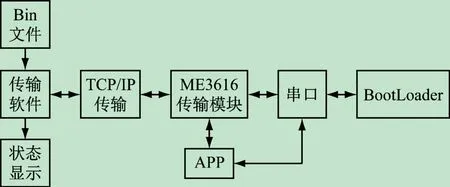
图6 远程升级过程示意图
下位机与服务器端上位机连接后,无线模块将上位机传来的信息通过串口发送给处理器。下位机跳转至BootLoader程序,当升级的程序通过上位机软件传输到下位机,BootLoader程序接收这个程序包,并对其进行校验、保存。下位机通过网络传输将反馈的信息发送到上位机,根据上位机的提示信息来判断远程升级是否成功。
5 振动标定
根据测试要求,需对振动监测系统的频率和幅度进行标定[13]。判断是否满足软X射线相机振动监测要求,如图7所示。

图7 标定实验场景
测试标定选用三轴变频电磁振动试验台,支持三轴振动,频率范围为1~2 000 Hz,幅度范围为0~5 mm,最大加速度20 g,可以进行调频调幅。将三轴传感器通过底部磁石固定在试验台上,通过控制台来设置实验参数。
选用调频调幅两种方法对该系统进行频率加速度以及位移的标定[14]。通过LabVIEW编写测试程序完成对频率加速度及位移的分析。
5.1 调频测试
调频实验通过设定振动控制台的加速度及幅度为固定值,改变振动台振动频率来测试系统对频率测量的精确度。将采集的数据波形进行傅里叶变换,得到其频谱,来判断设备采集到的频率是否正确[15]。固定振动控制台的振幅为1 mm,频率设置从4~400 Hz分段测试,得到结果如图8所示。
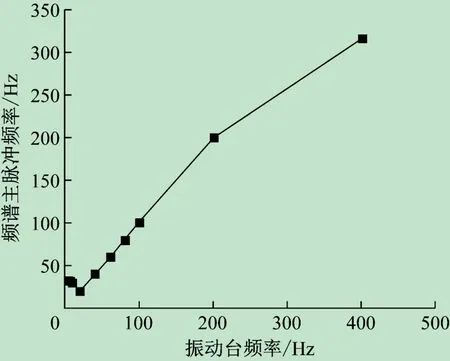
图8 振动台频率与频谱主频对应关系图
由图8数据分析可得,在4~10 Hz低频段,振动台与传感器之间会产生高次谐波,影响测量精度,在20~200 Hz范围内,测得的频率值与振动台设置的频率值几乎一致,当频率达到400 Hz以上时,根据奈奎斯特定理,设置的1 kHz采样率无法将全部波形采集完整,出现采集数据频率与振动台频率不一的情况。根据软X射线相机的振动谱监测要求,该系统在频率测量方面满足软X射线相机的频率使用要求。
5.2 调幅测试
调幅测试是为了通过加速度位移的准确性测试以保证速度位移计算的准确性,振动台设置为50 Hz的固定振动频率,将采集到的数据导入LabVIEW测试程序中,程序读取一个周期的数据,取6个峰值和6个谷值,相减之后取平均计算峰-峰值,幅度范围从0.2~3 mm等间隔设置15组振动幅度进行测量,与LabVIEW测试程序中显示的峰-峰值进行线性拟合,观察是否存在线性关系。
如图9所示,根据线性拟合可得,线性拟合度为0.991 41,振动台幅度与采集到的数据存在线性关系,证明设备对振幅采集的准确度。

图9 振动台幅度测试线性拟合
5.3 速度位移测试
设置振动台振动频率为100 Hz,振幅为1 mm,设备采样率为1 000 S/s。对Z轴加速度进行采集测试,得到如图10(a)所示的加速度原始数据。再利用式(1)得到图10(b)所示的速度波形图和图10(c)所示的位移波形。其中图10(c)的位移波形为标准的正弦波,振动幅度为1.018 mm,频率为100 Hz,与振动台设置的原始参数基本一致。

图10 速度位移测试结果
通过该系统测到的曲线和振动台的设备参数进行对比,测量的分辨率满足软X射线相机的振动监测需要,验证了该系统的可靠性。在数据分析过程中,传感器的信号原始数据由于受到外部环境和噪声影响,存在一定范围的震荡和低频分量。放大器随温度变化产生的零点漂移、传感器频率范围外存在低频不稳定以及传感器周围环境的干扰等因素,被测环境真实状况,会影响对数据时域,频域分析的结果。
6 结 语
使用三轴传感器,无线传输以及远程升级等实现软X射线相机的振动监测,以STM32F429为核心处理器,通过传感器对软X射线相机系统多种部件的三维振动状态进行实时监测,并将采集的振动数据通过移动网络进行远程传输。测量参数的监测结果符合相关标准,其中各轴位移的测量精度为0.1 mm,位移线性相关系数R=0.991 41,达到软X射线相机测试要求,系统不仅提高了监测效率,还实现了监测数据的统一管理,为后续的大数据分析和软X射线相机状态分析提供了研究基础。
猜你喜欢
机电安全(2022年5期)2022-12-13
哈尔滨工业大学学报(2022年5期)2022-04-19
科学(2020年1期)2020-01-06
当代水产(2018年8期)2018-11-02
车迷(2018年12期)2018-07-26
振动与冲击(2017年3期)2017-03-09
山东工业技术(2016年15期)2016-12-01
中国卫生(2015年12期)2015-11-10
中国卫生(2015年10期)2015-11-10
军民两用技术与产品(2015年23期)2015-01-08