
一种基于A*算法与8数码问题的特征映射与估价方法
2022-03-27 22:37顾宇轩
中国新通信 2022年1期


【摘要】 本文提出一种基于A*算法与8数码问题的特征映射与估价模型ENet,将神经网络的思想应用到估价函数中,使算法本身更具鲁棒性和高效性。同时,本文还将构筑了一个有关8数码问题的数据集ENumbers,并给出一种基于8数码问题的算法评价标准。实验显示,ENet方法相比其它经典方法更加有效,能够更加精确地拟合A*算法背景下的8数码问题,就皮尔逊相关系数这一精度指标对经典方法提升了約4.025%。
【关键词】 神经网络 启发式搜索 图搜索 8数码问题
引言:
A*算法[1]是在静态网络中求解最短路径问题下最有效的直接搜索方法之一。作为一种历史悠久而效率较高的人工智能方法,A*算法自提出以来,已经被广泛应用于诸如防反弹袭击[2]、机器人的自主无碰行动[3]、物流管理中的车辆问题[4-5]及类似的资源管理资源配置等路径规划与图搜索问题。
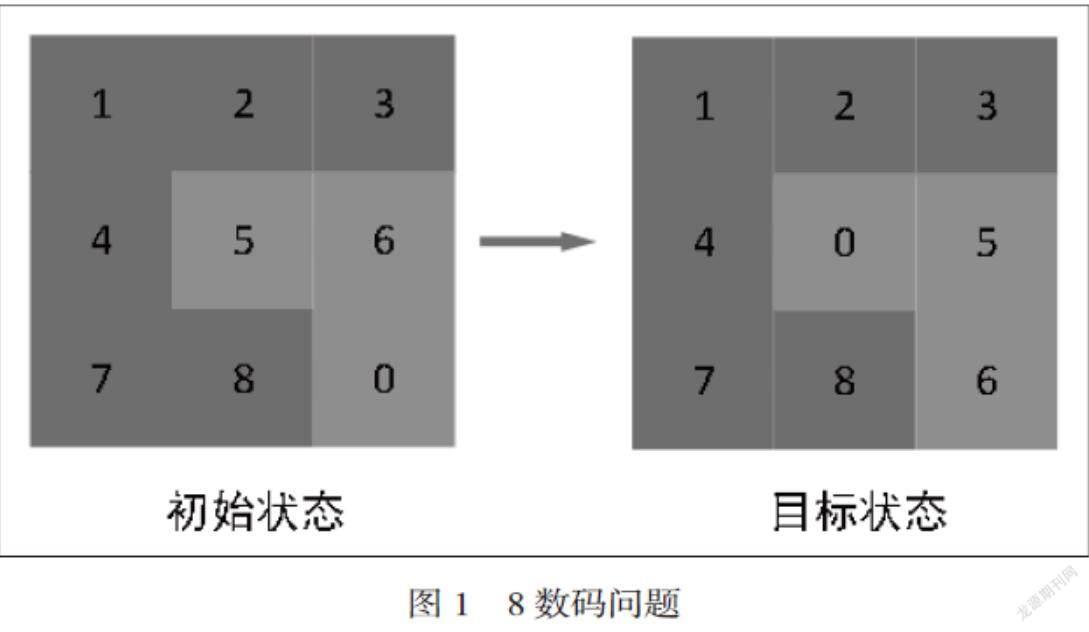
8数码问题是一种A*算法的经典应用场景与理论探索空间。所谓八数码问题起源于一种游戏:将分别标有数字0,1,2,3,…,8的八块正方形数码牌任意地放在一块3*3的数码盘上。规定0代表一个可以自由移动的空格,现在要求按照每次只能将与空格相邻的数码牌与空格交换的原则,将摆放完毕的数码盘样式(称初始状态)逐步摆成某种给定的数码盘样式(称目标状态)。如图1给出了一种8数码问题的常见形式。
一、相关工作
(一)A*算法流程
A*算法[1]是启发式搜索中的一个门类,所谓启发式搜索,与DFS和BFS这类盲目型搜索最大的不同,就在于当前搜索结点往下选择下一步结点时,可以通过一个启发函数来进行选择,选择代价最少的结点作为下一步搜索结点而跳转其上(遇到有一个以上代价最少的结点,不妨选距离当前搜索点最近一次展开的搜索点进行下一步搜索)。而A*算法得以从其它启发式搜索中脱颖而出的部分,就在于它的一个估值函数的设计上:
f(n)=g(n)+h(n) (1)
其中f(n)是每个可能试探点的估值,它由两部分组成:一部分为g(n),它表示从起始搜索点到当前点的代价。另一部分h(n),它表示当前结点到目标结点的估值,h(n)设计的好坏,直接影响A*算法的效率。
(二)关于8数码问题经典的估价函数计算方法
在一般的A*算法8数码问题学习过程中,我们通常采用起始状态与目标状态之间的矩阵差分(matrix differences)来度量距离[9]。在衡量相对简单的矩阵差异时,矩阵差分法和曼哈顿距离法都拥有相当理想的实验效果。
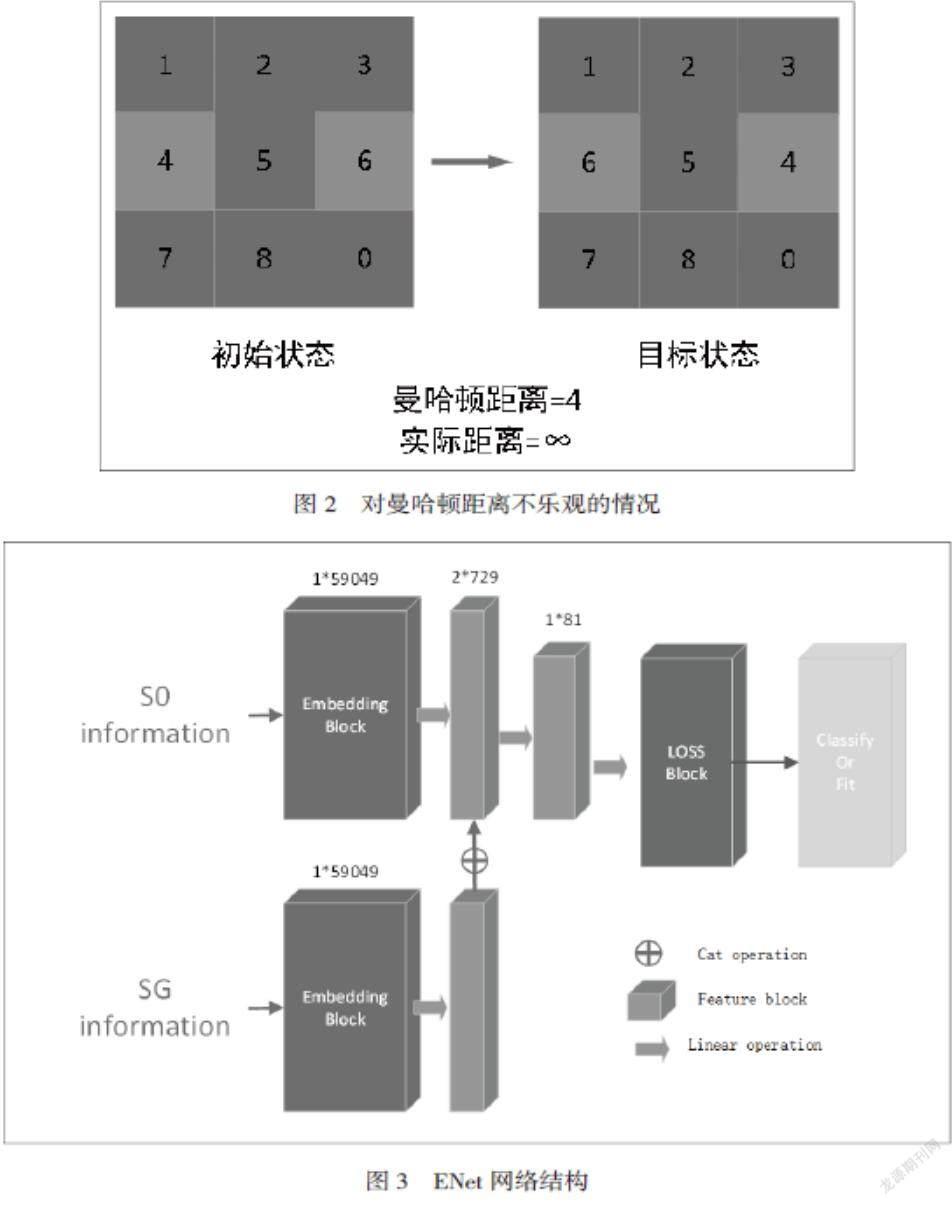
然而,很容易发现的是,这两种方法在差异点分布较远的情况下,会给出明显错误的计算结果。这是因为空间位置的差异未必能够反应移动所需的步数,即使矩阵之间看上去只有细微的差别,实际计算的过程中也可能耗费大量的成本。
综上所述,以上经典计算方法虽然拥有在简单情况下适用的性质,然而面对一些特殊情况,它们反而更容易陷入误判的泥沼。因此,提出一种全新的距离衡量方法,有其必要性与进步性。
二、本文算法研究
(一)8数码问题数据集及其精度判定标准
首先,为了衡量不同方法在8数码问题上的效率和精度,我们构筑了一个有关8数码问题的数据集ENumbers。该数据集由3个文档文件组成,前两个文档文件各有10000行,分别表示初始状态与目标状态,共包含10000对8数码矩阵。第三个文档则存储状态间的最短距离。
(二)ENet特征映射分类模型
为了改善传统A*算法与8数码问题中广泛存在的估值函数误差大与鲁棒性不足等问题,我们利用BP神经网络搭建了ENet深度学习模型,通过多层感知机将原本仅3*3的输入特征图映射到1*59049维的高层次特征空间中。再利用降维操作,对高层次特征逐步进行细化分类,最终输出一个起始状态到目标状态距离的预测值。
实验发现,在实际应用于8数码问题时,将矩阵差分法与ENet输出结果结合起来,往往能够起到更优良的效果。在这种情况下,模型的最终输出结果可以被表示为:
output(x)=v*ENet(x)+difference(x)-0.5 (2)
其中,v为ENet融合权重,ENet(x)表示ENet的模型输出,difference(x)表示输入数据使用矩阵差分法得到的输出值,为平衡二分类模型输出系数。
二、实验分析
本次实验数据集为ENumbers8数码问题数据集,随机选取起始状态与目标状态数据7000对进行训练,另有3000对数据按2:1比例随机划分为测试集和验证集,我们将在验证集上对实验结果进行评估和检测。
(一) 评价指标
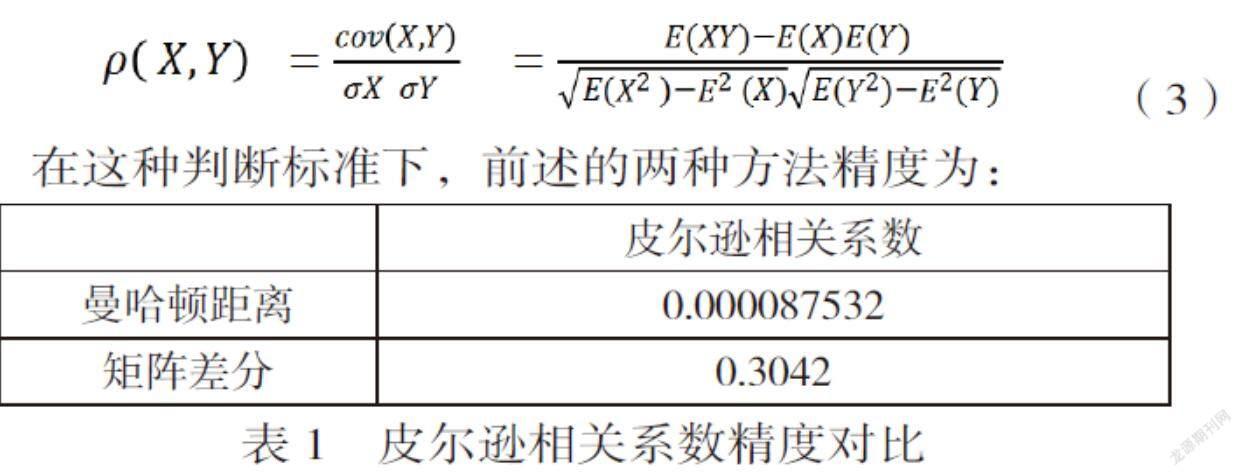
其次,考虑到A*算法本身在实现过程中,因数据结构的不同和数据集大小的限制,我们使用皮尔森相关系数来度量模型预测的整体精度,其公式为:
(3)
在这种判断标准下,前述的两种方法精度为:
针对本文提出的A*算法数据集,我们分别对矩阵差分和曼哈顿距离法进行了皮尔逊相关系数测试,实验发现曼哈顿距离与实际标签之间的相关性较差,而矩阵差分与实际标签之间具有一定的相关性,但仍存在较大的改进空间。
(二)实验参数设置
本文的ENet模型使用pytorch架构实现,Block Loss采用二分类输出,实验采用二分类交叉熵损失函数,训练选用Adam优化器,设置初始学习率为5*10^-4,每20次训练后衰减一次,衰减权重为0.05.设置实验。输入数据为两个1*9数码问题序列。
(三)實验结果分析
对模型输出结果和矩阵差分法进行复合,其结果在验证集上进行评估,使用皮尔逊相关系数作为评价标准,可以得到如下图4的输出结果和点阵图。
五、结束语
A*算法作为一种经典的路径规划与图搜索算法,在民用领域与军用领域都有广泛应用。本文针对A*算法中能够特定表征知识的启发函数部分,融合先进的神经网络模型,就皮尔逊相关系数这一指标对矩阵差分方法提升了约4.025%。同时,本文还提出了关于8数码问题的数据集,更新了有关该问题背景下的判别指标。
作者单位:顾宇轩 安徽大学
参 考 文 献
[1] Hart P E , MEMBER, IEEE, et al. A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J]. IEEE Transactions on Systems Science and Cybernetics, 2007, 4(2):100-107.
[2]楚孟慧, 吴姝瑶. 基于八数码问题的搜索算法的研究[J]. 电子制作, 2021(14):3.
[3]刘建娟,薛礼啟,张会娟,刘忠璞. 融合改进A*与DWA算法的机器人动态路径规划[J]. 计算机工程与应用, 2021(73-81).
[4]江洪,姜民.基于变步长A*与车身稳态转向模型的UGV路径规划[J].计算机系统应用,2021,30(10):240-247.DOI:10.15888/j.cnki.csa.008142.
[5]冯来春, 梁华为, 杜明博,等. 基于A*引导域的RRT智能车辆路径规划算法[J]. 计算机系统应用, 2017, 26(8):7.
[7]龙振海, 林泓. 8数码问题求解算法的改进与实现[J]. 中国高新技术企业, 2010(2):3.
[8]陈万军, 梁敏, 于洪志. 人工智能中A*算法的改进及其在8数码问题中的应用[J]. 西北民族大学学报:自然科学版, 2003, 24(4):4.
[9]张信一, 黎燕. 基于A^*算法的八数码问题的程序求解[J]. 现代计算机, 2003(5):5.
[10]胡敏杰. A*算法的探讨及其对八数码问题的实现[J]. 漳州师范学院学报:自然科学版, 2005(3):45-50.
[11] Yang L , Tian Y , Chen Y , et al. Multi-pattern recognition of sEMG based on improved BP neural network algorithm[C]// 中国控制会议. 2010.
[12]Zhang Y , Jing H E , Kan X , et al. Summary of road extraction methods for remote sensing images[J]. Computer Engineering and Applications, 2018.
[13] Jie H , Li S , Gang S , et al. Squeeze-and-Excitation Networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, PP(99).
[14]Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[C]//Advances in neural information processing systems. 2017: 5998-6008.
[15] Kip F T N , Welling M . Semi-Supervised Classification with Graph Convolutional Networks[J]. 2016.
猜你喜欢
读与写·教育教学版(2017年10期)2017-11-10
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
影像视觉(2016年5期)2016-06-23
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
数码世界(2009年12期)2009-12-11
数码世界(2009年2期)2009-09-02
数码家居(2009年7期)2009-08-31
