未知载荷条件下机械系统剩余寿命预测方法
2022-03-29 07:54许丹肖小琦冯至昕
北京航空航天大学学报 2022年3期
许丹,肖小琦,冯至昕
(北京航空航天大学 可靠性与系统工程学院,北京 100083)
传感器技术的发展为复杂的工程系统的状态检测与运行环境检测提供了条件。其中,许多退化部件的传感器信号被用于退化建模以预测退化部件的剩余寿命。对于设备退化建模与寿命预测,现有研究大多集中在单个传感器信号在单个运行条件下的分析。具体来说,通常先根据历史监测数据建立随机退化模型,再根据现场传感器实时采集到的监测数据对模型参数进行更新。周绍华等[1]使用非参数方法建立了稀疏数据单传感器信号退化模型,其中工作状态参数由极大似然估计(maximum likelihood estimate,MLE)算法获取。在基于多传感器信息退化建模方面[2-3],通常先构建健康因子再进行退化过程建模。任子强等[4]将多个传感器数据融合成一个复合健康指标,并采用线性维纳过程对复合健康指标进行退化建模,进而得到系统的预测寿命。近年来,学者们开始研究基于机器学习的融合方法。马奇友等[5]利用深度学习和长短期记忆组合来构造DLSTM网络,将多个传感器信号数据进行融合处理,得到系统剩余寿命预测。Chen等[6]提出了一种基于编码器-解码器框架的递归神经网络,融合多个传感器信号数据并预测HI值,通过线性回归获得最终的RUL值。但是,以上研究大多是考虑系统在单一工况下工作或者假设系统未来载荷与历史载荷服从独立同分布。目前,基于多传感器信息变载荷退化建模的研究较少。Javed等[7]提出了一种基于小波极限学习机与减法最大熵模糊聚类的方法对多维变载荷条件下的退化数据进行降维,并利用降维后的特征来描述退化过程。Yan等[8]以最小化退化模型不确定度、最小化失效阈值不确定度及最大化信息范围为目标进行线性优化,得到考虑变载荷情况下的传感器数据加权系数,构建健康因子。而在变载荷退化建模与预测中,未来载荷的不确定性也是研究的一个难点。Flory等[9]假设变载荷状态为一个马尔可夫过程,通过蒙特卡罗抽样与经典贝叶斯信息准则的方法从传感器信息中估计环境状态参数,作为变换融合模型的输入,估计退化过程的首穿时分布。
在许多情况下,系统通常会在多个载荷下工作,且载荷变化的下一个状态常常与此前的工作状态无关,即可以假设为具有马尔可夫的无后效特性。而隐藏的半马尔可夫链具有用于近似复杂概率分布的隐马尔可夫链的灵活性和用于表示时间的半马尔可夫链的灵活性,常用于设备的故障诊断及预测[10-11]。因此,本文提出一种基于隐半马尔可夫模型(hidden semi-Markov model,HSMM)的随机载荷空间构建和预测的方法。首先,采用HSMM对随机载荷空间进行建模。然后,结合多传感器信息的剩余寿命预测方法,得到针对未来载荷未知条件下的基于多传感器信息的变载荷下剩余寿命预测方法。
1 随机载荷建模
1.1 隐半马尔可夫模型
在常规的马尔可夫模型(Markov model,MM)中,模型在某状态停留一定时间的概率为非显式的概率模型,也就是说,没有参数化的表达形式。HSMM通过在隐马尔可夫(hidden Markov model,HMM)中添加显式时间组件(temporal component)来改进HMM模型中不准确的时间建模。研究人员提出,用精心选择的概率函数替换持续时间概率函数[12],而具有这种精心选择的状态时间概率函数的HMM模型成为HSMM模型。
HMM过 程 由π、A、B等 元 素 构 成[13]。与HMM模型不同,HSMM模型会在一个状态中产生一系列的观测值,HSMM模型参数可以记为

式中:π为初始状态分布;A为状态转移模型;B为观测概率模型;St表示t时刻下的隐藏状态;O为观测序列;D为状态停留时间分布。
1.2 基于HSMM的随机载荷空间建模
系统在工作中,常常需要经历多个工作状态,如发动机在不同的马赫数、油门解算器角度、飞行高度时,会对应不同的工作状态,即变载荷状态空间。在载荷随机变化的过程中,可以将其视为具有N个不同序贯状态的过程。令di表示载荷i下的停留时间,T表示该系统历经所有载荷的总时长,则有

假设HSMM模型中的状态序列χ包含了N个部分,令qi为一个部分中结束的时间点,则该状态序列可以表示为表1。载荷空间变化过程如图1所示。

表1 HSMM模型特征量Table 1 Characteristic variables in HSMM
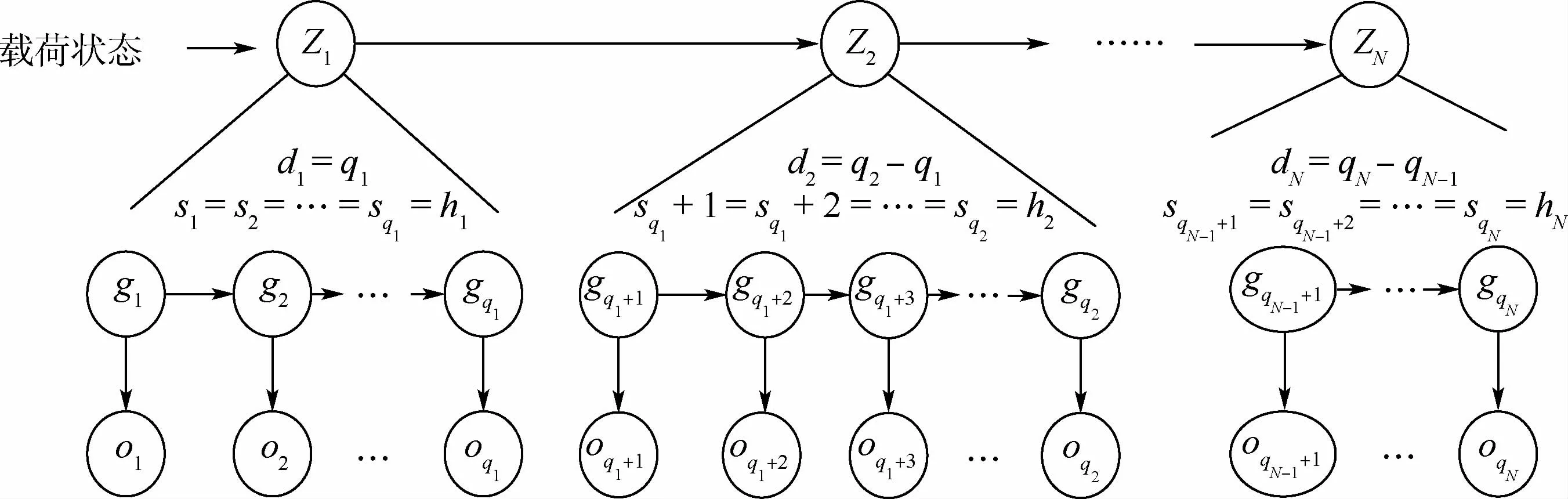
图1 HSMM载荷空间变化示意图Fig.1 Sketch map of load space change of HSMM
为实现上述基于HSMM模型的随机变载荷空间模型,对变载荷空间进行预测,采用改进的前向-后向变量与Viterbi算法,并通过动态规划方法对模型进行求解。
首先,将时间t时状态i下观测状态o1,o2,…,ot的联合概率分布定义为αt(i),即前向变量。同样,可以推出后向变量βt(i)。前-后向变量计算过程如图2所示。对于HSMM模型λ:
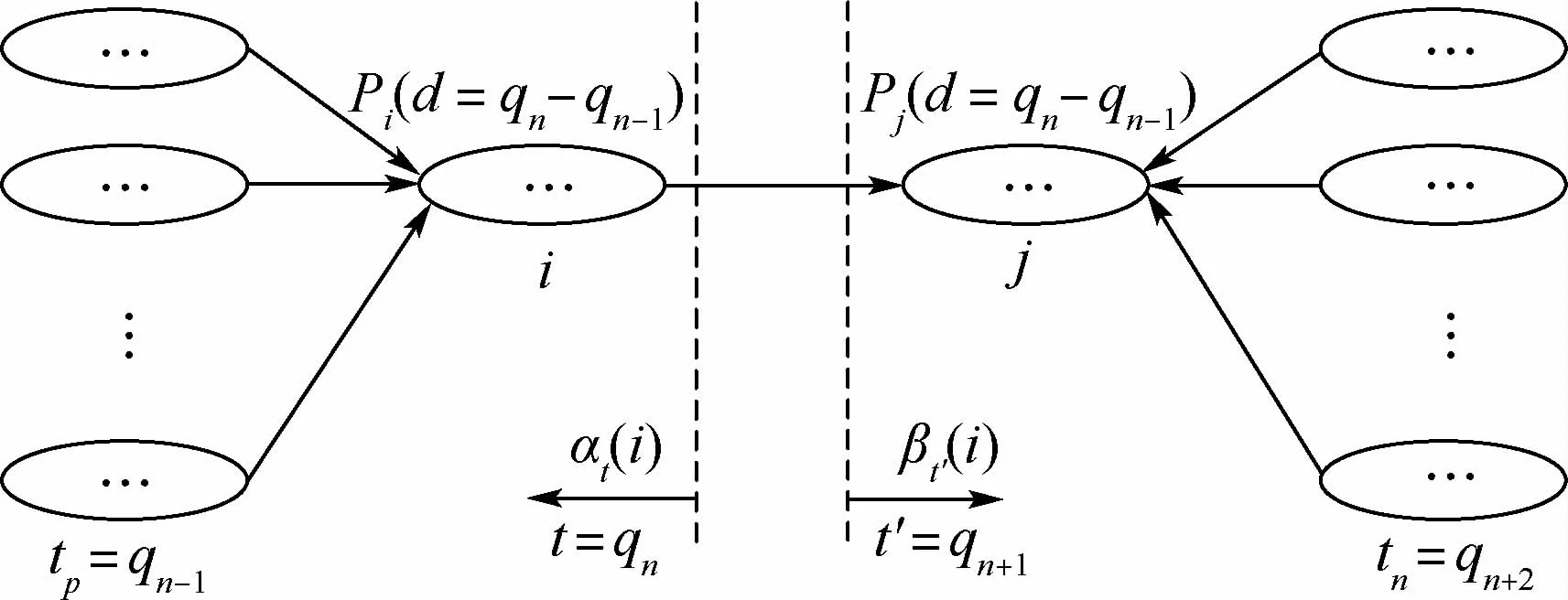
图2 前向-后向变量算法示意图Fig.2 Sketch map of forward-backward variable algorithm


O在给定HSMM模型的情况下的概率模型可以记为

为对模型的其他参数进行求解,继续定义了3个变量:第1个变量为载荷处于状态i时停留时间di,再跳转到状态j的平均概率值ϖt,t′(i,j);第2个变量为时刻t处于状态i和时刻t′处于状态j时的部分观测值o1,o2,…,ot′的联合概率αt,t′(i,j);第3个 变 量 为 在 给 定 观 测 值 序 列o1,o2,…,oT载荷处于状态i时的停留时间为di=t′-t,再跳转到状态j的概率值ξt,t′(i,j)。
Viterbi算法的流程可以参考文献[12]。令λ表示部分HSMM过程的参数集,则对于观测序列O与对应的状态序列Z可以写为

式中:θdi与θfi为对应分布的参数集。
通过EM算法,可以对λ进行求解,其求解过程可以总结为如下过程。
M步骤:设定新的λnew使得对数极大似然函数最大:

2 未知载荷条件下的剩余寿命预测
2.1 基于HSMM的随机载荷预测
1)初始状态分布
在已知O时,模型的初始状态即在状态i为初始状态的概率:
2)状态转移概率
状态转移概率的估计为从状态i转移到状态j的期望与从状态i转移的总期望值之间的比值:
3)观测值分布


当使用显式状态停留时间模型时,状态停留时间密度反映在观测值中的重要性在于可以显著提高模型的质量。然而,使用显式状态停留模型当作状态停留时间密度有一定的缺点:①会使与状态停留时间相关的变量计算量大增;②包含了除基本的HMM模型参数外的与每个状态都相关的大量参数d的模型。因此,HSMM模型的参数估计过程比标准的HMM过程更加困难。解决问题的方案是使用参数化状态停留时间密度函数而不是非参数密度函数。同时,综合考虑高斯分布、威布尔分布等分布的应用情况和在训练时计算量的大小,本文采用高斯分布对状态停留时间概率进行建模。状态停留时间参数通过训练集进行估计,状态停留时间的高斯分布的均值与方差可通过如下步骤进行估计。
1)训练HSMM模型识别N个不同载荷,即建立对载荷进行分类的模型。已知N组观测序列,对N组不同的HSMM模型(如HSMM1,HSMM2,…,HSMMN)中的每一组都进行特征建模。
2)对HSMM模型进行分类。在给定观测序列时,N组HSMM模型中的每一个都通过同一序列呈现。根据极大似然估计,可以对这些序列进行分类。


式中:D(Zi)表示载荷Zi的状态停留时间分布;μ(Zi)和σ2(Zi)分别为均值和方差;ρ为相应的系数。
具体的状态停留时间模型预测步骤如下:
步骤1 通过HSMM训练程序(如参数估计),从而可以获取HSMM的状态转移概率。
步骤2 通过HSMM的参数估计,每一个载荷下的状态停留时间的概率分布函数可以获取。
步骤3 通过分类,可以识别实时的载荷。

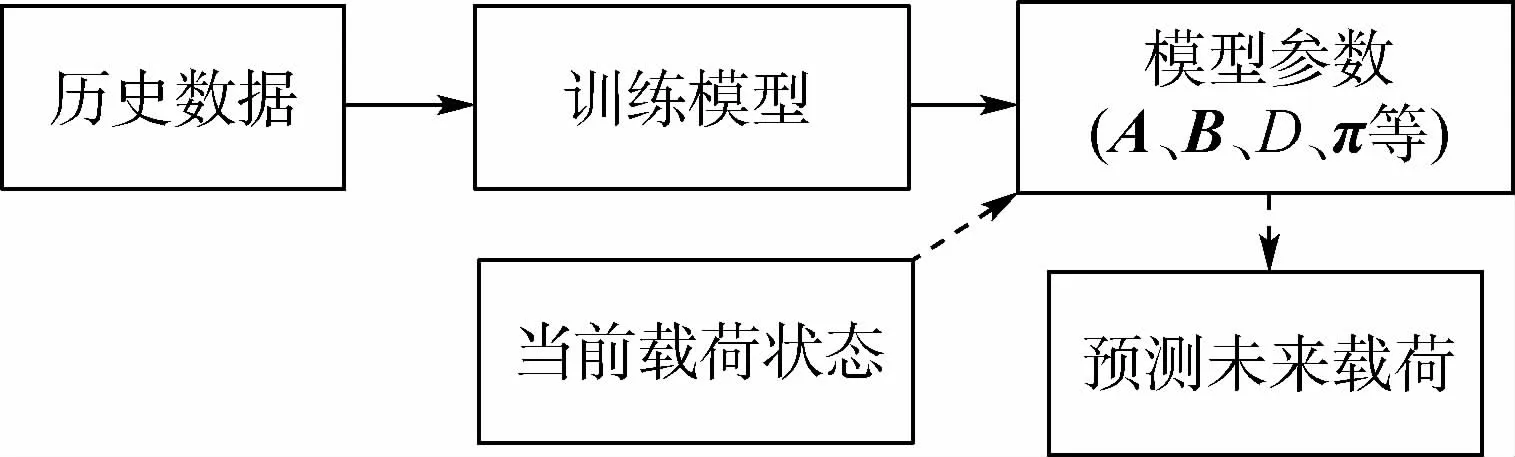
图3 基于HSMM的随机载荷预测Fig.3 Random load prediction based on HSMM
2.2 基于随机预测载荷的剩余寿命预测
基于本文提出的随机载荷预测方法,可以得到每一个HSMM模型中每一个状态的停留时间分布D及状态之间的转移概率A。基于所求解的HSMM模型,已知tk-1时的状态概率Zi,递推在时间tk时状态为Zj的概率为

基于这一递推公式,可以得到每一时刻的载荷与处于该载荷的概率。将这些概率代入文献[14]中所述的预测寿命的方法,便可计算得出预测的剩余寿命:

式中:yi为系统/部件的失效时间;Ω(·)为累积分布函数;σ为尺度参数;π(si,p,l(t))为位置参数;si,p,l(t)为载荷l下第i个系统第p个传感器的退化信号。
系统剩余寿命为式(14)得到的寿命估计值减去实时的时间值。基于随机预测载荷的剩余寿命预测流程如图4所示。

图4 基于随机预测载荷的剩余寿命预测Fig.4 Remaining life prediction based on random load prediction
得到剩余寿命后,对其进行误差分析来验证本文方法的准确性。剩余寿命相对误差计算方法如下:
式中:Emean为均值的相对误差;Evar为方差的相对误差;meanes和meansim分别为预测得到的剩余寿命分布的均值和原始数据库中的剩余寿命分布均值;Vares和Varsim分别为预测得到的剩余寿命分布的方差和原始数据库中的剩余寿命分布的方差。
3 发动机应用案例
商用模块化航空推进系统仿真(C-MAPSS)数据库的多传感器退化数据为基于物理退化模型的飞机涡扇发动机仿真数据[15]。本文选取CMAPSS数据库中发动机在多种载荷条件下的性能退化数据进行应用案例验证。图5展示了CMAPSS系统中的发动机主要部件。所使用的数据基于如下假设:发动机退化是由于单个部件(如高压腔与高压压气机)在使用过程中特定载荷下的磨损引起的。同时,在数据库中,特定飞机上的损伤累计是无法直接基于飞行时间与飞行载荷计算的。因此,只能使用飞行过程与飞行刚刚结束时多传感器记录的退化信号对飞机涡扇发动机的剩余寿命进行计算。
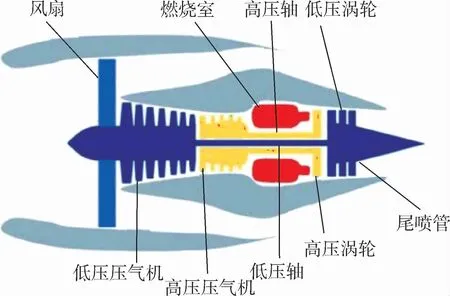
图5 商用涡扇发动机结构简图Fig.5 Structure of commercial turbofan engine
该仿真数据库包含260个样本,挑选其中的80%(208个)作为历史数据,剩余20%(52个)作为在线测试样本。其中,包含了21个性能传感器参数,同时包含了3个表征载荷状态的传感器。载荷状态空间如表2所示,其不同载荷主要由3个指标表征,即马赫数、高度、油门解算器角度(TRA)。从表2中可知,这3个表征载荷的指标综合构成6个不同的载荷状态,该仿真数据在这6种载荷状态下仿真得来的。由于涡扇发动机整体结构十分复杂,难以建立准确的物理模型,采用基于数据的传感器融合方法进行处理,并基于训练集数据对测试集样本进行未来载荷未知情况下的剩余寿命预测研究。
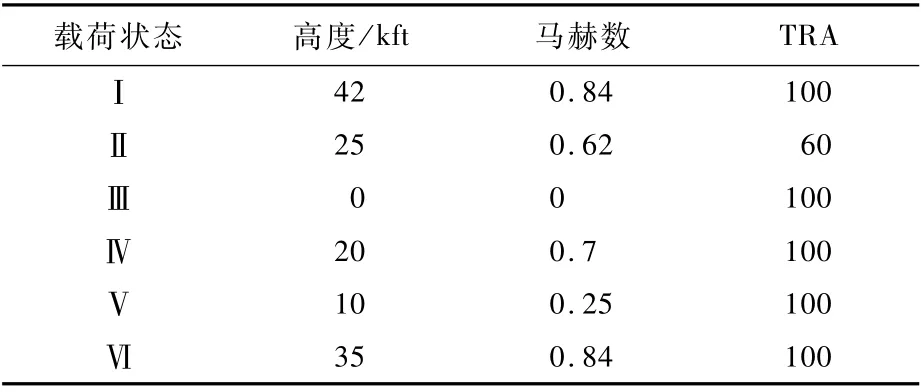
表2 载荷状态空间Table 2 Space of load states
图6展示了6个不同载荷条件随时间变化的过程。可以看出,在涡扇发动机模拟仿真过程中,6个应力状态随时间变化,且综合考虑数据库中所有的数据,载荷变化呈现出一定的随机性。也就是说,3个表征载荷状态的参数呈现出随时间变化的特点且具有一定的随机性,同时,可以认为后续状态只与前一个状态相关而与之前的其他状态无关,即具备马尔可夫空间的无后效性。同时,表征3个指标的传感器可以视为观测状态,而不同的观测状态的组合构成了载荷状态,因此可以根据基于HSMM模型的剩余寿命预测方法对CMAPSS仿真数据中的随机载荷进行建模,将这6个载荷空间中不同载荷状态下的停留时间视为一个随机分布过程,并使用高斯过程对状态停留时间进行拟合。从而得到基于HSMM模型的载荷空间构建,通过2.1节中提出的模型参数方法对载荷空间的参数进行求解,从而在未来载荷未知的情况下对载荷变化进行预测,为未来载荷未知时的涡扇发动机剩余寿命预测提供基础。

图6 六个载荷状态随时间变化示意图Fig.6 Sketch map of six load states changing with time
首先,基于2.1节提出的基于HSMM模型的变载荷空间建模与参数预测方法,可以求解得到HSMM模型的相应参数,如表3和表4所示。假设初始状态为状态Ⅴ,未来载荷预测结果如表5所示。基于这一载荷模型可以对未来载荷的变化情况进行预测,结合文献[14]中提出的预测方法与式(13),可以对载荷未知的条件下的剩余寿命进行预测。基于HSMM模型的变载荷空间建模与参数预测方法是基于过去已知载荷预测未来载荷并代入寿命预测模型预测寿命,案例中同时也使用发动机从开始到失效真实经历的载荷代入文献[14]的方法进行寿命预测,即未来载荷已知的情况。

表3 六个载荷状态之间的转移概率矩阵Table 3 Transition probability matrix of six load states

表4 六个载荷状态各自停留的时间均值与方差Table 4 Average and variance of settling time under six load states
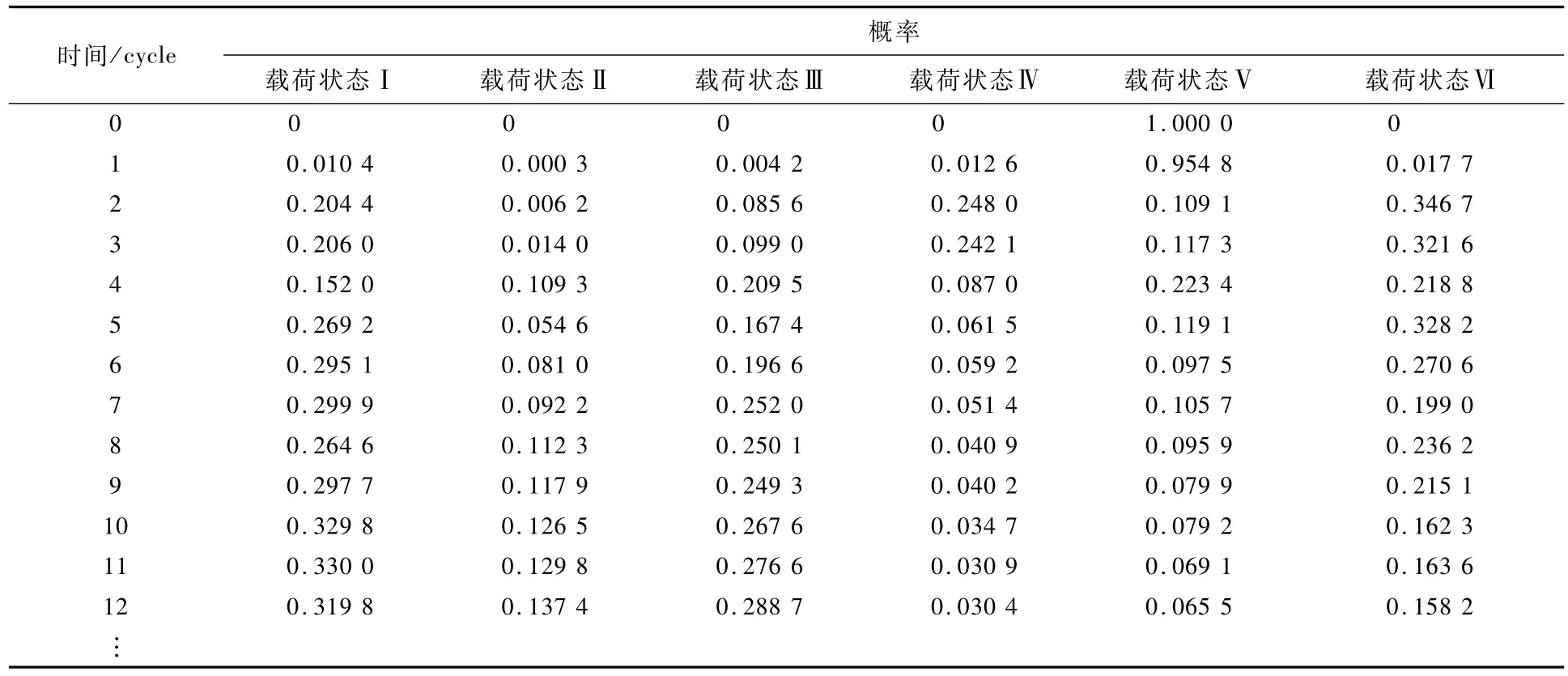
表5 未知载荷预测结果Table 5 Pr edicted results for unknown loads
使用不同使用信息占比下的部分剩余寿命预测结果如表6与表7所示。为了分析预测结果的准确性,再根据式(15)和式(16)计算剩余寿命相对误差的均值与方差值,如表8与表9所示。

表6 未来载荷已知时的剩余寿命Table 6 Remaining life when future loads are known

表7 未来载荷未知时的剩余寿命Table 7 Remaining life when future loads are unknown
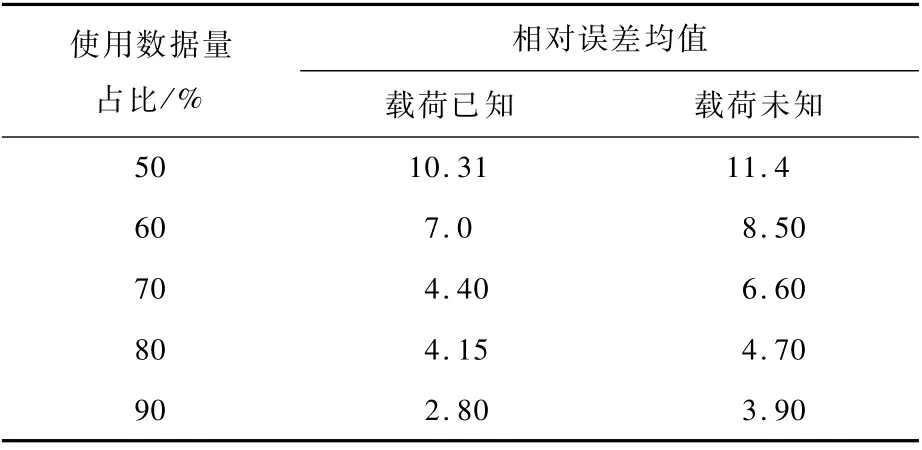
表8 剩余寿命相对误差均值Table 8 Average relative error of remaining life

表9 剩余寿命相对误差方差Table 9 Variance of relative er ror of remaining life
从表8和表9可以看出,预测模型达到了一定的准确度,即对均值与方差的估计值与载荷已知条件下的误差相差小于5%。因此,使用HSMM模型对随机载荷空间进行建模与预测具有一定的有效性。通过表8和表9可以看出,在使用数据占比越大时,对剩余寿命的均值与方差估计值的估计误差越小。这是由于大量的数据提高了模型参数估计值精度提高,从而提高整个模型的预测精度。
4 结 论
针对运行在多工况下的机械系统,本文提出的基于隐半马尔可夫模型的寿命预测方法解决了未来载荷未知情况下的寿命预测问题。通过案例应用,验证了本文提出的预测方法的有效性和正确性。
1)相比于当前寿命预测方法仅考虑单一工况或者系统未来载荷与历史载荷服从独立同分布的假设,本文将预测的未来载荷信息代入寿命预测模型进行寿命预测,更符合实际情况。
2)与发动机真实载荷代入计算的结果进行比较,结果表明本文提出的基于随机预测载荷的剩余寿命预测方法具有一定的准确性。由于载荷预测模型引入了预测误差,这种情况下的剩余寿命预测值比载荷已知时的剩余寿命预测值的相对误差更大,但是依然保持在较低的水平。
猜你喜欢
水上消防(2022年2期)2022-07-22
数理化解题研究·综合版(2021年11期)2021-12-22
北京航空航天大学学报(2021年9期)2021-11-02
小学教学研究(2021年5期)2021-09-29
课程教育研究(2021年27期)2021-04-13
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
初中生世界·九年级(2020年2期)2020-04-10
作文评点报·低幼版(2020年3期)2020-02-12
华人时刊(2018年17期)2018-12-07