变质心固定翼无人机动力学分析与抗扰控制
2022-03-29 07:55邱潇颀高长生荆武兴
北京航空航天大学学报 2022年3期
邱潇颀,高长生,荆武兴
(哈尔滨工业大学 航天学院,哈尔滨 150001)
变质心控制通过安装在飞行器内部的质量滑块来控制其飞行状态。对于固定翼无人机来说,变质心方案相对于传统的气动舵面方案,具有维持无人机气动外形、提高气动效率、简化机翼结构、提高隐身性能等诸多优点[1]。近年来,变质心控制技术已广泛应用于卫星[2-5]、水下航行器[6-9]、高超声速飞行器[10-14]、火星再入[15]和临近空间飞艇[16]等多个领域。
当前,对变质心无人机的研究可分为旋翼机和固定翼两大类。Haus等[17]着眼于控制效率,提出了一种通过质量滑块控制四旋翼飞行姿态的方案,将2个滑块分别安装在4个螺旋桨臂上,从而可以控制四旋翼的倾侧和俯仰运动,并通过合理设计的原型机[18],验证了该方案的可行性。与螺旋桨控制相比,变质心方案具备更快的响应速度且更为节省能量,但该方案所能提供的最大控制力矩很大程度上取决于滑块的质量和行程大小。对于变质心固定翼无人机,Erturk等[19-22]做了较为系统的研究,沿无人机纵向和横向分别放置滑块,以提供操纵无人机所需的俯仰和滚转力矩,通过分析采用该布局的变质心固定翼无人机在平飞、零侧滑角转弯等不同工况下的特性,指出变质心方案在不增加无人机质量的同时,消除了传统舵面方案中由于气动舵偏转所引起的气动阻力,有效降低了无人机的燃油消耗。此外,Erturk等还考虑了螺旋桨扭矩对变质心固定翼无人机的影响[23-24],并开展了简单的飞行试验以验证方案可行性[25]。当前,多数变质心固定翼无人机采用将滑块安装在机翼中段的双滑块方案,而机翼中段狭窄的空间势必会给滑块的安装带来挑战;此外,控制器多由简单的线性化方法设计[26]。显然,对于具有强非线性、强耦合特点的变质心固定翼无人机,基于线性化方法所设计的控制器在实际工作中将面临巨大挑战,甚至有失效的风险。
本文围绕新型变质心方案和具有强鲁棒性的姿态控制器设计2个问题展开研究,提出了一种通过质量滑块控制无人机横向运动的新型单滑块方案,从而实现对副翼的替代。相对于双滑块方案[25],该方案时滞更小、结构更加简单,且滑块的安装空间相对充裕。通过对该无人机进行动态特性及动力学耦合特性分析,为滑块参数的设计提供了量化参考,给出了滑块在机身上的理想安装位置。基于粒子群算法(particle swarm optimization algorithm,PSO)设计了单滑块变质心固定翼无人机的自抗扰控制器(active disturbance rejection control,ADRC),仿真结果验证了该控制器具备较强的鲁棒性和抗干扰能力。
1 运动模型及动力学特性


图1 变质心固定翼无人机简图Fig.1 Sketch of mass-actuated fixed-wing UAV
假设图2所示文献[25]中的2种双滑块方案与本文的单滑块方案具有相同的质量比,则有μL=μR=μ1/2,μL和μR分别为双滑块方案中的左右滑块质量比。本文提出的单滑块方案相对以上2种双滑块方案,具备如下优势:
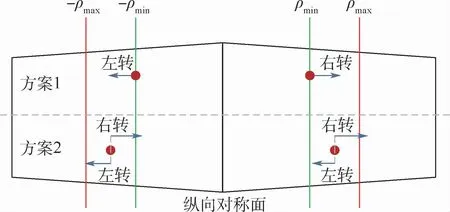
图2 文献[25]中的双滑块方案Fig.2 Dual-slider scheme in Ref.[25]
1)相对于方案1,时滞更小。对于方案1来说,每次只能操纵一侧的滑块,若想提供与本文单滑块方案相同的滚转力矩,其滑块的移动距离则应为单滑块方案的2倍。而当滑块移动速度相同的情况下,必然会导致方案1需要更多的时间才能提供所需俯仰力矩,即方案1的时滞更大。
2)相对于方案2,结构更加简单。
3)滑块的安装空间相对充裕。由于方案1和方案2两种双滑块方案均将滑块放置于机翼中部,这对本来空间就十分狭小的机翼来说颇具挑战。而本文所提出的单滑块方案,将滑块的移动范围限制在空间相对充裕的机身内和机翼根部,这在一定程度上缓解了滑块安装时的空间约束问题。
1.1 变质心无人机运动模型
根据牛顿运动定律和动量矩定理,推导出本文研究对象的运动学模型和动力学模型。运动学方程为

式中:u、v、w和p、q、r分别为无人机质心平动速度和绕质心转动角速度在机体坐标系三轴的分量;pn、pe、pd为无人机在地面坐标系下的位置;φ、θ和ψ分别为滚转角、俯仰角和偏航角。
而变质心无人机的动力学模型为
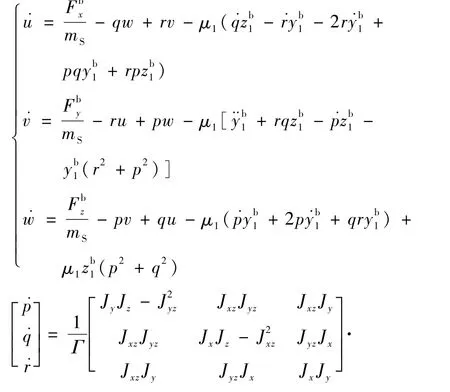

1.2 动力学特性分析

1.2.1 纵向运动
可以得到变质心无人机纵向运动线性化方程为

式中:Xlon=[u w q θ]T为状态;Alon和Blon分别为状态矩阵和控制矩阵;ulon=[δeδt]T为控制量,δe和δt分别为升降舵偏转角和油门大小。

式中:矩阵Alon和Blon中各参数的具体含义见文献[27],θ*为平衡状态下的俯仰角。


表1 纵向运动特征根Table 1 Eigenvalues of longitudinal motion

图3 纵向动态特性区域分布Fig.3 Area distribution of longitudinal dynamic characteristics

式(4)给出了变质心无人机的俯仰力矩:

式中:G为系统重力;ρ为大气密度;Sref为参考面积;c为平均气动弦长;α为迎角;C·为各气动系数。


1.2.2 横向运动
类似地,变质心无人机横向运动的线性化方程为

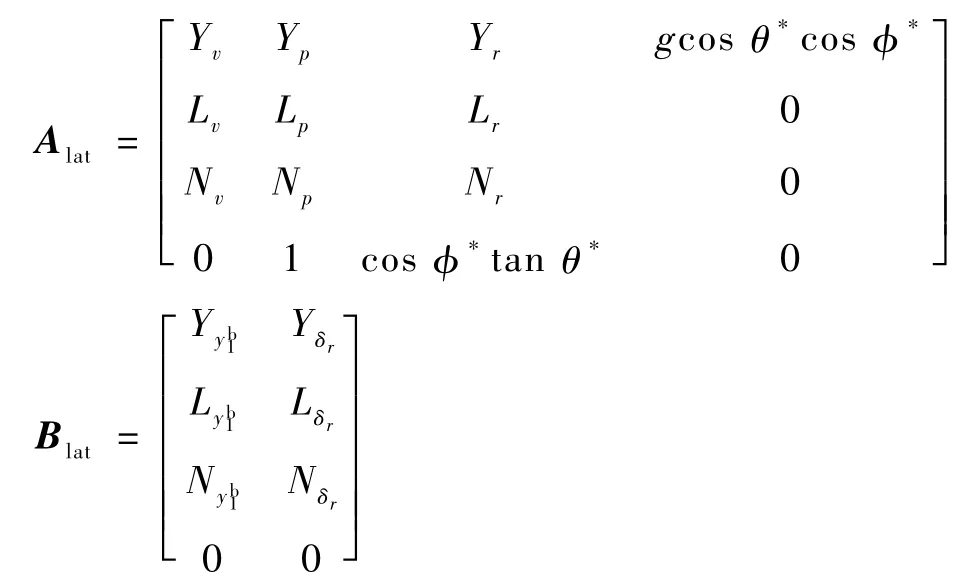
其中:矩阵Alat和Blat中各参数见文献[27],φ*为平衡状态下的滚转角。
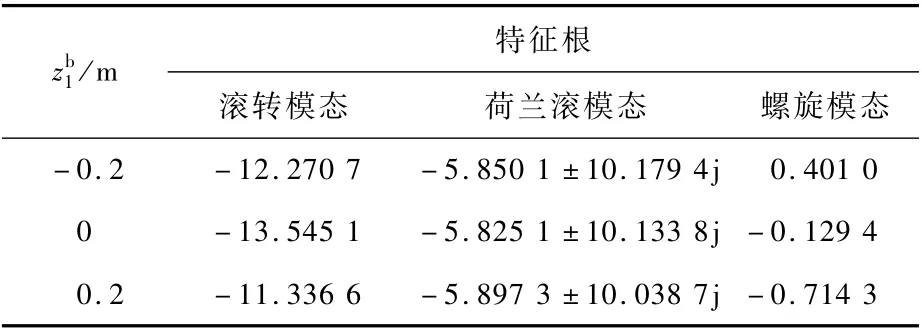
表2 横向运动特征根Table 2 Eigenvalues of lateral motion

式中:k·为与发动机性能有关的常数;b为翼展;β为侧滑角。
1.3 控制效率分析


图4给出了质量比一定时,滑块效率系数随无人机飞行速度的变化曲线。可以看出,其数值随着无人机飞行速度的增大而逐渐降低,且变化速度趋缓。因此,本文所提出的单滑块变质心方案适合于飞行速度普遍较低的小型固定翼无人机,可以实现对其姿态的高效控制。

图4 效率系数随速度变化曲线Fig.4 Efficiency coefficient versus airspeed
2 自抗扰控制器设计
针对变质心无人机动力学强耦合、强非线性特点,以及在飞行中面临的参数摄动和外部扰动等复杂因素,本节将设计变质心无人机自抗扰控制器。
2.1 仿射形式控制模型
令φ=[φ,θ,ψ]T、ω=[p,q,r]T,基于第1节所建立的变质心无人机运动方程,可得

式中:ζ为未知扰动;J为惯性张量;M为力矩矢量。


式中:


式中:dφ为总扰动,且
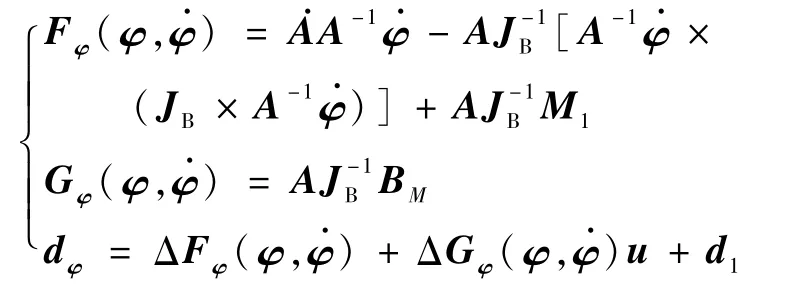

2.2 控制器设计
基于式(11)所示的变质心无人机仿射形式非线性控制模型,结合自抗扰控制器基本原理[28],可设计如图5所示的自抗扰控制器。
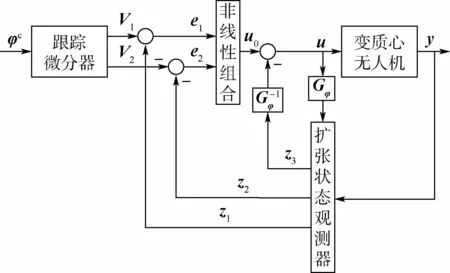
图5 控制器结构Fig.5 Structure of controller
首先,可设计离散形式的跟踪微分器为

式中:r0为速度因子;h为滤波因子;φc为指令值;fhan(·)为最速综合控制函数[28]。
扩张状态观测器的离散形式为

式中:β01、β02、β03、r1、r2为可调参数,直接影响扩张状态观测器的估计精度;函数fal(·)定义为

自抗扰控制器的非线性状态误差反馈设计为
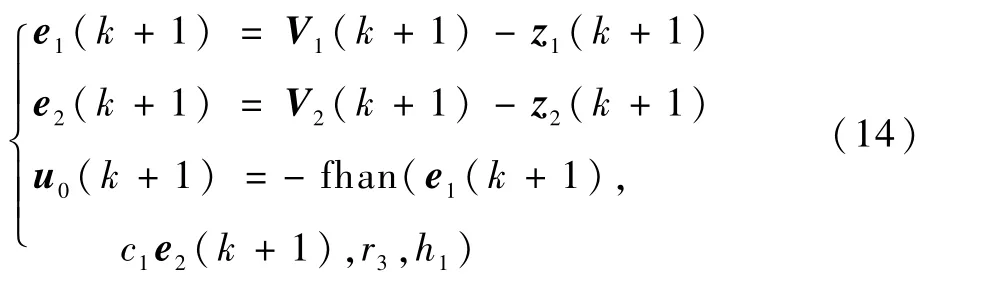
式中:c1、r3、h1为可调参数。
进一步动态补偿线性化处理,可得控制量为

考虑到所设计的控制器具有多个可调参数,手动调节过程必然十分耗时。本文采用粒子群算法[29]对自抗扰控制器参数进行优化设计。根据经验,跟踪微分器的滤波因子可直接取值h=0.01,则待优化参数为r0,β01,β02,β03,r1,r2,c1,r3,h1共计9个。利用粒子群算法优化这9个参数时,为了在保证控制器准确性和快速性的同时,防止控制量的急剧变化,将粒子的适应度函数取值为

3 仿真分析
本节对第2节所设计的变质心无人机自抗扰控制器进行仿真,以验证控制器的有效性、鲁棒性和抗干扰能力。主要分析了以下3种工况:①工况1,理想工况,系统无参数摄动及外部扰动,并将此工况作为基本参照。②工况2,变质心无人机受到气动参数、质量特性等内部参数摄动20%的影响,以此验证控制器的鲁棒性。③工况3,在此工况下,第6~7 s的时间区间内对系统施加一个1.5sin t形式的扰动,用来模拟阵风;在其余的时间内,对系统施加一个0.1sin(80πt)形式的高频扰动,以此来验证控制器的抗外部干扰能力。
变质心无人机的基本参数如表3所示。滑块行程范围为±0.2 m,最大滑动速度为0.7 m/s;升降舵偏转角限制在±30°之间;方向舵偏转角同样限制在±30°之间;仿真特征点选取为Va=40 m/s的水平直线飞行状态。经过粒子群算法优化后的控制器参数为h=0.01,r0=92.123,β01=198.77,β02=5 753,β03=33 188,r1=1.331,r2=1.262,c1=1.160,r3=2.435,h1=0.086。不同工况下的控制器仿真结果如图6~图9所示。

表3 无人机参数Table 3 Parameters of UAV
图6和图7分别给出了控制器对指令姿态角的跟踪结果及其相应的控制信号曲线。可知,无论是面临参数摄动还是外部扰动,经过粒子群算法优化后的自抗扰控制器,均能够在满足控制信号约束的条件下完成对指令信号的稳定跟踪,且具备良好的动态特性及稳态精度,这充分说明了该控制器具备良好的鲁棒性和抗干扰能力。

图6 姿态角跟踪结果Fig.6 Tracking results of attitude angles

图7 控制信号曲线Fig.7 Control signal curves

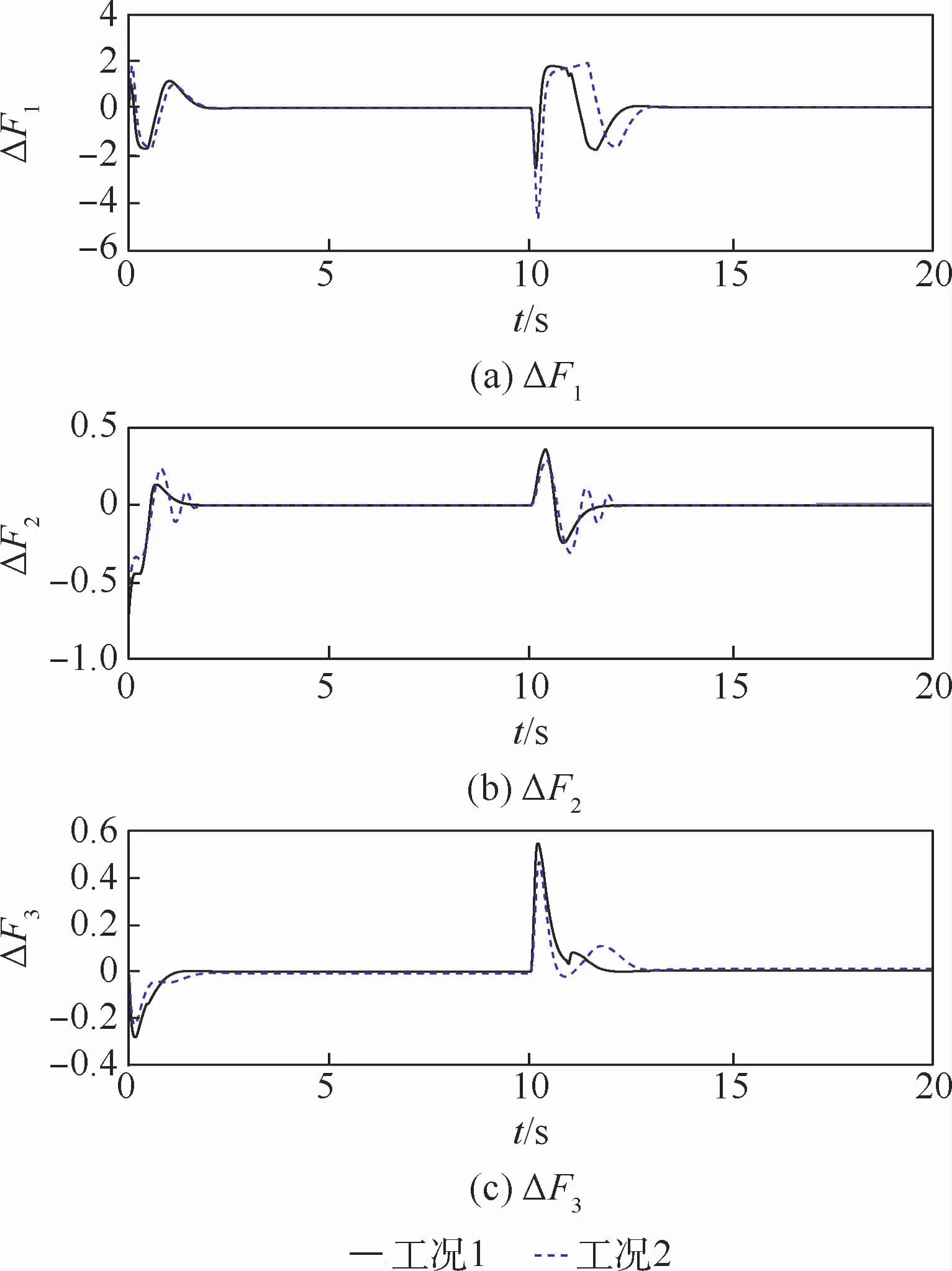
图8 扩张状态观测器估计误差Fig.8 Estimation error of ESO

图9 工况3下的扩张状态观测器性能Fig.9 Performance of ESO under Condition 3
4 结 论
本文以变质心固定翼无人机为对象展开研究,取得如下结论:
1)提出了一种时滞性更小、结构更加简单、空间相对充裕的单滑块变质心固定翼无人机布局方案。
2)基于所推导的变质心无人机运动模型,分析了滑块参数对无人机动力学特性的影响,并给出了滑块在机身上的理想安装位置。
3)针对变质心固定翼无人机的强耦合、强非线性特点,本文设计了基于粒子群算法的自抗扰控制器。仿真表明,在面临系统参数摄动和外部扰动等多种复杂工况下,该控制器均能够有效完成对变质心固定翼无人机的控制任务,具备良好的鲁棒性。
猜你喜欢
科技研究·理论版(2021年22期)2021-04-18
青少年科技博览(中学版)(2020年12期)2020-03-29
求学·理科版(2017年10期)2017-12-19
航空模型(2016年10期)2017-05-09
航空模型(2016年10期)2017-05-09
婚姻与家庭·性情读本(2017年1期)2017-02-16
电脑知识与技术(2016年28期)2016-12-21
汽车科技(2016年5期)2016-11-14
科技视界(2016年16期)2016-06-29
科技视界(2016年10期)2016-04-26