多航态水下仿生机器人的设计
2022-03-29 05:54王彦斌沈荣天
科技创新与应用 2022年7期
王彦斌,李 烨,张 弛,沈荣天
(哈尔滨工程大学,黑龙江 哈尔滨 150001)
海上钻井平台和水下电缆等大型水下设备需要定期巡检,损坏后如果不及时维修会造成难以估量的经济损失和环境污染。目前水下设备的检修大多依靠人工检修或AUV和ROV联合检修,但是从AUV发现目标发出信号至母船接受信号并释放ROV,这段时间目标很可能移动,但是ROV的运动范围有限,无法继续搜寻。所以目前人工检修风险极高,AUV和ROV联合检修的成本高,效率低,并且存在操作复杂难以配合等不足。
因此市场亟需一种集巡航和定点作业能力于一体的水下机器人,本作品设计了一款集AUV巡航能力和ROV定点作业能力于一体的水下仿生机器人,解决巡航和定点作业无法快速配合的问题。
1 总体设计
首先根据结合AUV巡航功能和ROV定点作业功能的需求,确定机器人航爬双模式的工作方式。我们清楚目前腿式机器人在陆地上运动性能的优越性,但是在水下速度并不能很出彩。躯干波动式在水下流体环境中速度不俗,但是在陆地上就差强人意。所以根据作品的工作场景的独立性将在水中游动的最优选择和崎岖地形爬行的最优选择相结合。
因此我们的作品将鱼类的游动和昆虫的爬行进行有机结合,既保证了游动的效率和机动性,又保证了在崎岖地形的稳定性。然后根据识别目标、定点作业以及保持工作稳定的要求,为机器人增添控制系统、CPG算法以及目标识别功能。
2 机械设计
因为我们的作品要具备在水中航行和海底爬行的能力,所以我们自主设计了一种可以将航行和爬行模式有机结合切换的机械系统。首先在游动模式下,通过仿生机械鱼尾摆动,利用鱼体波推进方式游动。在接近定点作业的目标点时,多航态水下仿生机器人由游动模式转换到爬行模式,侧鳍收在躯体下方,机械腿从躯体内部展出,进行爬行。精确到达目标地点,能够实现精确定位,具有低能耗、低噪音、高效率的优点。
3 硬件设计
机器人的硬件架构包括使命计算机和底层控制器。使命计算机采用NVIDIA Jetson TX2开发板,底层控制器采用STM32H7。
底层控制器主板上设有USB接口以接受上位机指令,同时配备有R485接口和舵机控制模块进行舵机信号控制和舵机电流信号采集。
为了减小舵机大电流带来的干扰,该作品将控制电路和大电流驱动电路进行隔离。舵机供电采用了单独的供电电路,舵机供电电路主要为舵机提供大功率输出,避免发生因供电功率不足而造成舵机烧毁的问题。此外,电源输入端还加入防反接电路,对系统电路进行保护。同时,电路的模块化分立设计有利于降低控制主板受到电磁信号的干扰。
4 软件设计
4.1 六足控制
仿生机器人在爬行模式下可简化为一个六足机器人,六足机器人的机构简图如图1所示。

图1 六足机器人机构简图
机器人的运动采用三足步态,即每3条腿作为1个运动组,同一运动组中的腿及其包含的关节的运动状态相同。腿1、腿4和腿5为一组,腿2、腿3和腿6为一组。因此,机械腿上的18个关节也可以分为6组,关节2,4,6一组,关节3,5,7一组,关节9,13,17一组,关节8,12,16一组,关节11,15,19一组,关节10,14,18一组,每组关节的运动状态相同。
用1表示关节正转,-1表示关节反转,0表示关节不转。

可得到慢速三足步态的步态矩阵为
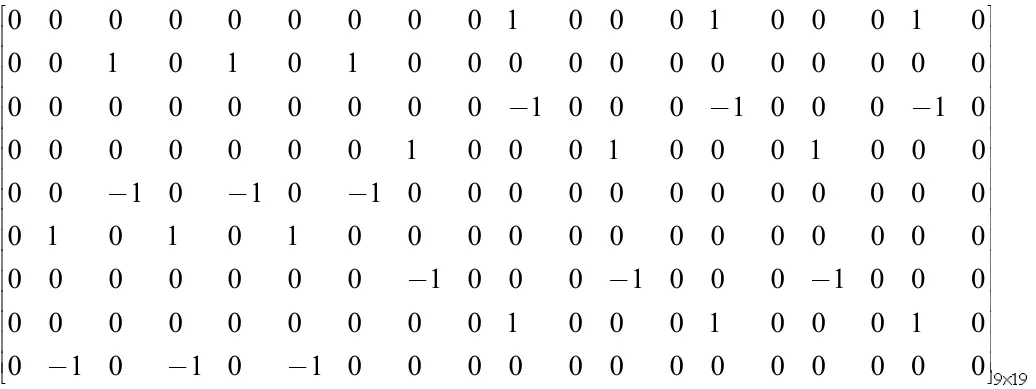
步态矩阵为9×19矩阵,ri行向量表示一个步态周期中第i步各关节的运动状态,cj列向量表示第j个关节在一个步态周期中的运动状态。(其中,第1列表示底板的固定关节,第1行表示起始时的准备步态,第2列到第9列表示循环步态。)
为了对仿生机器人的爬行模式进行仿真,将模型导入到ADAMS中,添加材料属性、连接关系、驱动和接触条件后,得到的仿真模型如图2所示。为了方便观察机器人的运动情况,添加了一个圆柱标志物作为参照物,机器人运动一步的过程如图3所示。
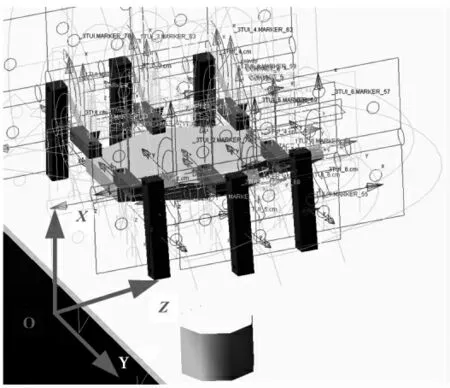
图2 六足机器人仿真模型

图3 六足机器人的运动过程
机器人的运动情况如图4所示,机器人的一个运动周期T=8 s可前进55 mm。
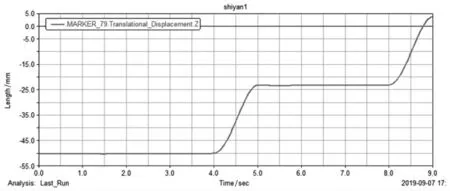
图4 机器人的运动情况
六足仿生机器人的特点是具有丰富的步态并且能在复杂路面上高效行走,存在多种步态,可以适应不同步行速度和载荷的要求,冗余的肢体结构,使其在失去若干肢体的情况下仍能继续执行一定的任务,提高了系统的可靠性[1]。
行为的步行控制结构,应用包容体系结构,对任务进行分层,各行为层以一种分等级(优先级)的方式并行运行,较高优先级的行为层可以对较低优先级的行为层的输出进行修正/抑制,即所谓的包容[2]。
4.2 游动控制
借助仿真软件ADAMS对尾巴及尾鳍机构进行运动学分析,将模型导入到ADAMS中并添加材料属性、连接关系和驱动,如图5所示。

图5 尾巴及尾鳍机构仿真模型
仿真过程如图6所示。

图6 仿真过程图
通过仿真得到各关节的转角如图7所示。

图7 各转角转动的角度
通过仿真可知,尾巴及尾鳍摆动的周期为2 s,关节1转动的角度为30°,关节2转动的角度为20°,关节3转动的角度为10°,与设计值吻合。
5 性能分析
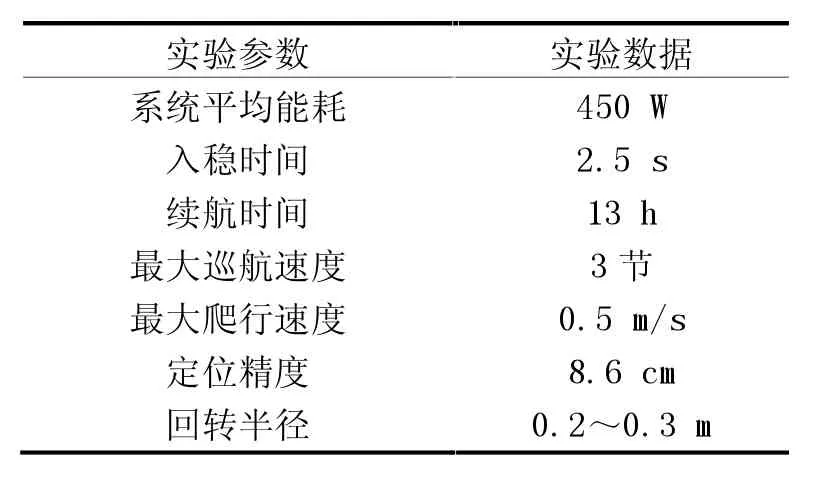
表1 性能分析
6 结束语
近几年随着国家海洋强国战略的逐渐落实以及通过5G加速商业化所透露出的对信息技术行业的大力支持,透露出海洋信息设备行业的火爆。而我们团队设计的多航态水下仿生机器人具有极强的续航性、自主性与功能可拓展性,能有效提高水下作业的效率。我们的作品可以应用于海底资源采样、水下救援、水下电缆维修以及水产养殖等多种工作,能够为国家的海洋建设提供有力支持,为建设海洋强国事业添砖加瓦[3]。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
哈尔滨轴承(2021年1期)2021-07-21
小学科学(2020年11期)2020-03-04
自动化学报(2019年6期)2019-07-23
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
中华骨与关节外科杂志(2016年3期)2016-05-17
舰船科学技术(2015年8期)2015-02-27