GNSS驯服芯片级原子钟方法研究
2022-03-30 07:16乔广欣张慧君李孝辉
导航定位与授时 2022年2期
乔广欣,张慧君,李 博,李孝辉
(1.中国科学院国家授时中心中国科学院时间频率基准重点实验室,西安 710600;2.中国科学院大学电子电气与通信工程学院,北京 100039)
0 引言
全球卫星导航系统(Global Navigation Satelli-te System,GNSS)可驯钟(GNSS Disciplined Oscillator,GNSSDO)是一种将GNSS接收机和本地时钟相结合的高精度时钟源。它以GNSS接收机输出的1PPS信号作为参考信号,通过时差测量设备与本地钟进行时间比对,获取本地钟与GNSS系统时间的偏差,以对本地时钟进行校准,从而使本地钟与GNSS时间保持同步,并达到提升长期稳定性的目的。由于GNSS可驯钟利用了高精度的GNSS时间源,其成本相对较低,且能够满足用户对于高精度时间频率的普遍需求。在电力电子、基站通信、金融服务等行业中,GNSS可驯钟已经得到了广泛的应用。
目前,GNSS可驯钟使用的本地时钟主要有温补晶振(Temperature Compensated Crystal Oscillator, TCXO)、恒温晶振(Oven Controlled Crystal Oscillator, OCXO)以及铷原子钟。其中TCXO和OCXO的精度较低,需要进行频繁的校准;而铷原子钟虽然拥有较高的精度,但是其体积相对较大,且功耗更高,无法满足用户在移动环境下的使用需求。随着技术的不断发展,出现了基于相干布局囚禁(Coherent Population Trapping,CPT)的芯片级原子钟(Chip-Scale Atomic Clock,CSAC),它拥有传统原子钟频率精度高的特性,同时又兼顾了晶体振荡器体积小、功耗低的优势,是构建GNSSDO的理想频率器件。CSAC SA.45s是由美国Microsemi公司生产的一款商用型芯片级原子钟,它的内部结构如图1所示,其中铯原子物理封装在接收到微波综合器发出的激励信号后,产生铯原子基态超精细频率。在环路滤波器的作用下,铯原子基态超精细频率中的高频噪声被滤除,之后该信号对TCXO进行校准,将TCXO锁定在铯原子频标上,使CSAC输出稳定的10MHz信号。同时,CSAC通过内部电路对10MHz信号进行分频,输出1PPS信号。SA.45s的质量为35g,体积为17cm,运行功率仅为120mW,在体积和功耗上都明显小于传统的原子钟。在精度方面,CSAC SA.45s的短期频率稳定度为3×10/1s、3×10/100s、1×10/1000s;老化率分别为9×10/月、1×10/年。其钟速(相对频偏)约为5×10s/s,即在1天内的累计钟差可达43.2μs。将GNSS接收机输出的、代表GNSS系统时间的1PPS脉冲信号作为参考,对CSAC进行驾驭,可以改善其准确度和稳定度。

图1 CSAC SA.45s内部结构框图Fig.1 Block diagram of the internal structure of CSAC SA.45s
文献[12]设计了一种基于PI控制算法的GPS可驯钟,但是该算法响应速度较慢,因此动态性能较差。文献[3]和文献[13]则采用PID控制算法对本地时钟进行控制,在PI算法的基础上增加了微分控制部分,提升了动态响应速度,同时增强了系统的稳定性。但是该算法需要通过前期试验,确定其中的比例、积分、微分控制系数,以及对本地时钟的控制周期。文献[2]中使用乒乓算法将铷原子钟驾驭到GPS系统时间上,与PI/PID算法相比,乒乓法的主要控制参数为驾驭时间常数(对本地时钟的控制周期),同时乒乓法具有钟驾驭量计算过程相对简单和设计复杂度低的优点。
因此,本文选用乒乓法对CSAC SA.45s进行驾驭,使CSAC与GNSS系统时间保持同步,从而生成稳定的1PPS时间信号以及10MHz频率信号。
1 GNSS可驯钟驾驭算法设计
钟驾驭的基本原理是利用本地时钟的钟差历史数据进行建模,以获取本地时钟的特征参数,然后根据特征参数计算钟驾驭调整量,对本地时钟进行相应的调整。CSAC的钟差模型可以用式(1)表示

(1)
其中,为钟差测量的起始时刻;为CSAC与参考信号的初始相位偏差;为CSAC与参考信号的初始频率偏差;为CSAC自身的频率漂移率,又称老化率;()为由频率噪声引起的随机误差。通过最小二乘法,可解算出、、的结果。
由于CSAC与接收机在初始时刻存在较大的相位偏差,需要对CSAC进行调相,完成相位粗同步。经过相位粗同步后,影响CSAC钟差的主要因素为频率偏移,因此在后续的步骤中使用的调整方式为频率调整。同时,CSAC在开始工作时存在一个驱使其与GNSS系统时间的钟差朝零方向变化的频率偏移,需要通过调频将该偏移量消除。在消除了上述两种初始偏差后,全球导航系统规格振荡器(GNSSDO)已经进入一种相对稳定的运行状态,将该状态称为相位精同步,后续的钟驾驭操作将一直在该状态下进行。其中,在相位精同步状态下使用乒乓算法对CSAC进行驾驭,将CSAC与GNSS系统时间的钟差控制在一定范围内。上述的整个驾驭过程如图2所示。当GNSS接收机发生失锁时,会输出异常的1PPS信号,对钟驾驭过程造成影响。针对这一问题,在相位精同步状态时会通过当前的钟差测量值判断接收机是否发生失锁,如果检测到当前钟差为奇异值,则判定接收机发生失锁,重启接收机,在等待35s后重新进入相位精同步状态,恢复钟驾驭操作。
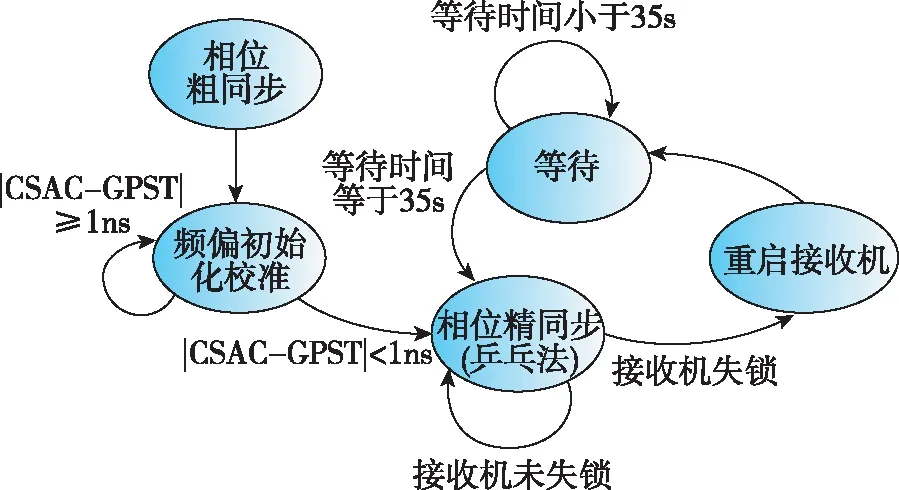
图2 GNSS可驯钟状态转换图Fig.2 State transition diagram of GNSSDO
1.1 可驯钟初始化同步
可驯钟初始化同步包含相位粗同步和频率初始化校准两个步骤,其目的是校准CSAC在开始工作时存在的初始相位偏差和初始频率偏差。在相位粗同步状态时,算法通过启用CSAC SA.45s的手动同步功能,将CSAC 1PPS信号的上升沿调整至接收机1PPS信号的下一个上升沿的100ns以内,完成对CSAC的相位粗同步。
在频率偏移初始化校准状态中,程序会实时监测CSAC与GNSS接收机的1PPS相位差(1PPS_CSAC-1PPS_GPST)。如果当前钟差测量值在±1ns之间时,程序使用从粗同步结束到当前时刻的所有钟差数据对CSAC的钟差模型系数进行拟合,得到初始频率偏差,并将其作为钟驾驭调整量对CSAC进行调频,使CSAC的钟差在±1ns之间平稳变化。
1.2 相位精同步
CSAC在经过相位粗同步和频率偏移初始化校准状态后,与GNSS系统时间的偏差保持在几纳秒。因此在该状态中,使用基于调频的乒乓算法对CSAC进行驾驭。
乒乓算法是一种可以让时钟与参考信号的钟差波动保持在一定范围内的频率控制算法。当到达预定的时间(驾驭时间常数)时,算法会根据CSAC初始频率偏差和钟差值计算出钟驾驭调整量,对CSAC进行反方向调频。之后循环上述操作,使CSAC与GNSS系统时间的偏差在一定范围内往复运动。本文中的乒乓算法共分为以下三种情况:
1)CSAC的钟差测量值的绝对值大于1ns,且钟差向零方向靠近(图3(a));

(a)
2)CSAC的钟差测量值在±1ns之间,且CSAC的初始频率偏差的绝对值大于1×10(图3(b)),为了保证CSAC的短期频率稳定度不被破坏,所以在CSAC的初始频率偏差的绝对值小于或等于1×10时不对其进行驾驭操作,减少对CSAC的频率调整;

(b)
3)CSAC的钟差测量值的绝对值大于1ns,且钟差变化趋势为远离零方向(图3(c))。
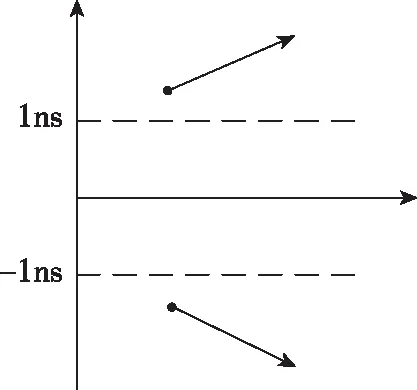
(c)图3 CSAC钟差变化趋势分类Fig.3 Classification of CSAC clock error change trend
上述三种情况的钟驾驭调整量计算方式为
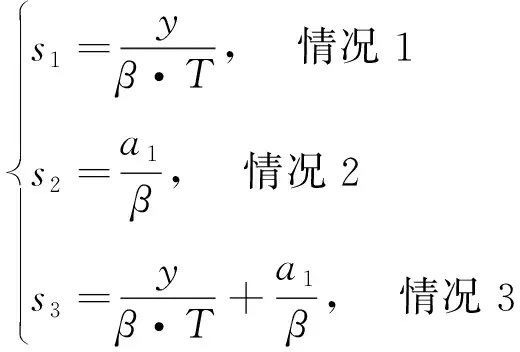
(2)
其中,(=1,2,3)是钟驾驭调整量;是钟驾驭时间常数;是校准时刻CSAC与GNSS系统时间的钟差;是CSAC的初始频率偏差;为衰减因子,用于防止对CSAC的过调整。
驾驭时间常数代表了算法对CSAC实施驾驭的频次,即校准时间间隔。当驾驭时间常数过小时,由于频繁的调整,会破坏CSAC的稳定性;当驾驭时间常数过大时,CSAC因长时间未被驾驭而产生一个较大的钟差,进而使得钟驾驭调整量过大,导致CSAC的信号产生突变。因此,对CSAC(未驾驭)与GNSS接收机参考信号(GPST)的频率稳定度进行比较,选取合适的驾驭时间常数。如图4所示,CSAC与GPST的阿伦方差在≈100s处存在一个交点,当<100s时,CSAC的频率稳定度要优于GPST;而在>100s时,GPST的稳定性更好。为了在钟驾驭过程中不破坏CSAC原有的短期频率稳定度,并且提升其长期频率稳定度,将本算法的驾驭时间常数设置为100s。
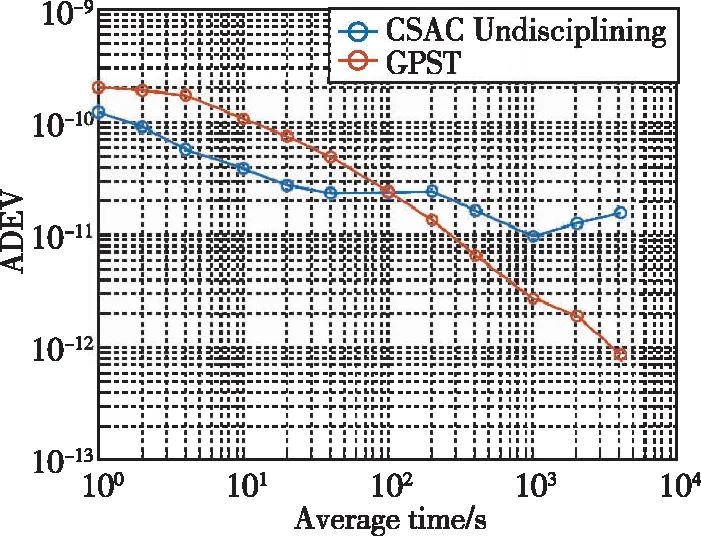
图4 CSAC与GPST的频率稳定度Fig.4 Frequency stability of CSAC and GPST
2 GNSS可驯钟测试平台设计
为验证本文设计的钟驾驭算法对CSAC的驾驭效果,搭建了图5所示的GNSS驯服芯片级原子钟测试系统。搭载有钟驾驭软件的工控机负责采集CSAC与GNSS系统时间(GPST)的钟差,并且对CSAC进行驾驭操作,使CSAC输出稳定的1PPS信号和10MHz信号。由于GNSS接收机实际输出的1PPS信号是在接收机内部时钟信号边沿附近处产生的,与接收机解算出的1PPS信号位置(真值)存在10ns以内的偏差。通过读取GNSS接收机输出的1PPS偏差改正量,可以对钟差测量结果中出现的偏移进行修正。此外,图中通过脉冲分配放大器输入到CSAC的接收机1PPS信号用于对CSAC进行相位粗同步。
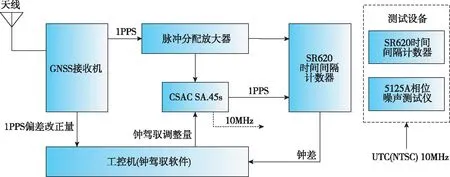
图5 GNSS可驯钟测试系统框图Fig.5 Block diagram of test platform of GNSSDO
采用SR620时间间隔计数器和5125A相位噪声测试仪对测试系统中驾驭后的芯片级原子钟SA.45s输出的1PPS同步误差以及10MHz频率稳定度进行测试。采用UTC(NTSC)主钟输出的10MHz信号作为测试设备的参考时钟。
3 测试结果与分析
分别从钟差、频率准确度以及频率稳定度三方面对本文算法的驾驭效果进行评估。此外,还将其驾驭结果与CSAC demo软件驾驭结果(钟驾驭时间常数同样设置为100s)进行了比较。
根据本文设计的钟驾驭算法对CSAC进行驾驭,通过测量受控CSAC与GNSS接收机的1PPS信号相位差,得到了如图6所示的时钟同步误差。CSAC在经过驾驭后与GNSS系统时间的偏差在-7.5~7.5ns之间波动,未出现明显的频率偏移。
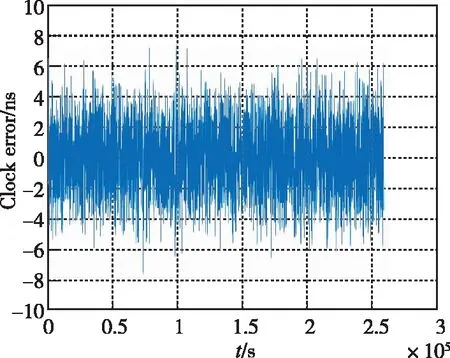
图6 CSAC与GNSS系统时间(GPST)的钟差Fig.6 Clock error between the CSAC and the GNSS time system(GPST)
表1给出了CSAC未驾驭和经过驾驭后的1h频率准确度。在经过乒乓法驾驭后,CSAC频率准确度为5.8×10,与未驾驭时的结果相比提升了3个数量级,同时使用CSAC demo软件驾驭得到的频率准确度为7.02×10。

表1 CSAC频率准确度
结合图7和表2进行分析。经过驾驭后的CSAC在保持了原有短稳的基础上,长稳也得到了明显的改善,=10000s时的频率稳定度提升至3×10。与CSAC demo软件的驾驭结果相比,乒乓法在短稳保持方面表现更优,但是在长稳优化方面两者差距不大。

图7 CSAC频率稳定度(阿伦方差)对比图Fig.7 The comparison chart of CSAC frequency stability (Allan Deviation)
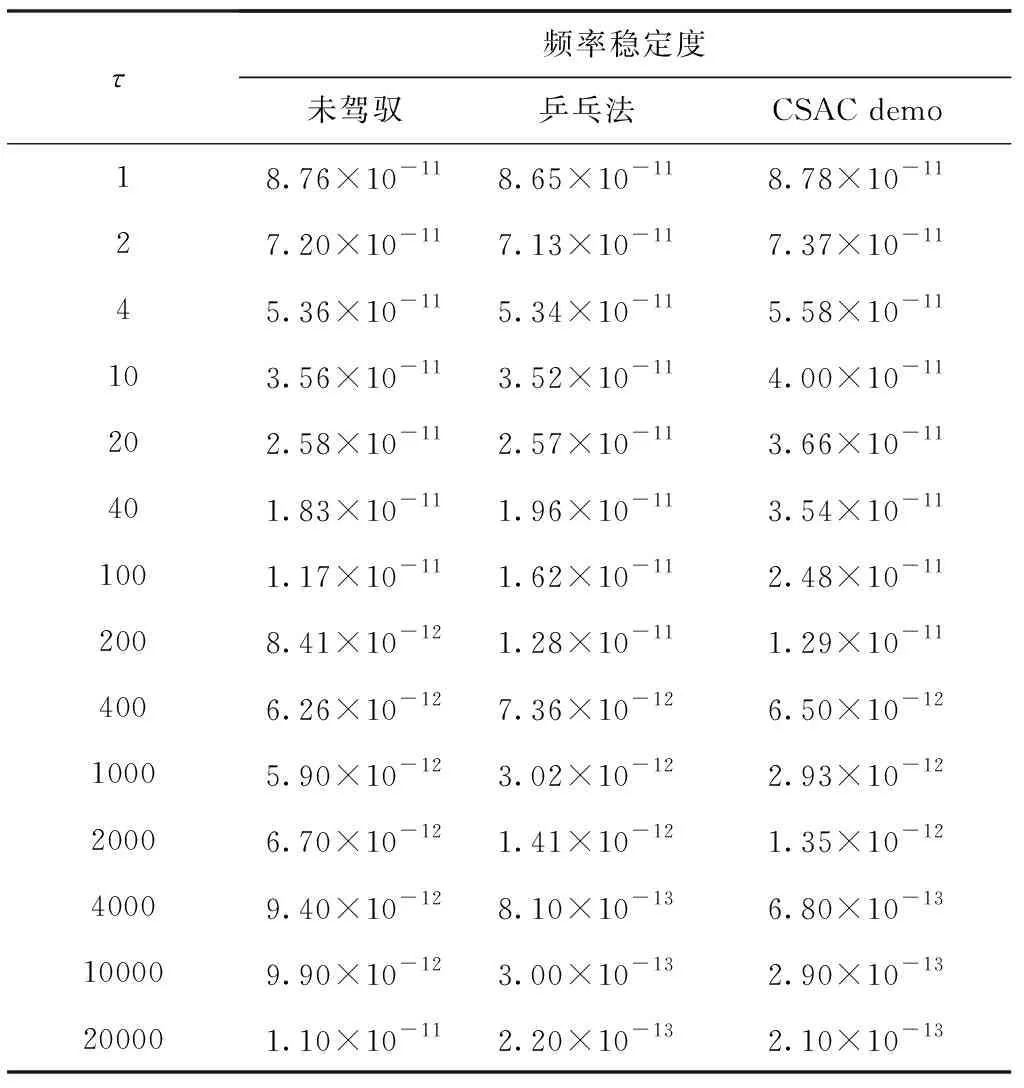
表2 CSAC频率稳定度(阿伦方差)
4 结论
本文设计的钟驾驭算法实现了对CSAC精度的提升,其中时间同步误差在-7.5~7.5ns之间,1h频率准确度为5.8×10,平均时间为10000s时的频率稳定度为3×10,验证了将CSAC作为GNSS可驯钟的本地时钟为用户提供高精度授时服务的可行性,为构建小型化GNSS可驯钟提供了技术参考。与CSAC demo软件的驾驭结果相比,本文设计的算法拥有两点优势:
1)利用GNSS接收机输出的1PPS偏差改正量对钟差测量结果进行修正,减小了因接收机1PPS信号跳变对钟驾驭的干扰。
2)本文算法包含了对GNSS接收机出现失锁时的处理功能。在发生失锁时重启接收机,并且令SA.45s以失锁前的调整量继续运行。待接收机重启恢复正常后,继续进行钟驾驭操作,提升了系统的稳定性。而使用CSAC demo软件的算法无法对外部1PPS参考信号的异常进行判断,在接收机发生失锁的情况下,仍然进行钟驾驭操作,致使SA.45s输出的1PPS信号发生异常。
综上所述,乒乓算法在面对异常的1PPS参考信号时拥有更好的抗干扰能力,在改善SA.45s长期稳定度的基础上保证了其短期稳定度不被破坏。因此,在驾驭时间常数相同的情况下,乒乓法的驾驭结果要优于CSAC demo软件。
在接下来的工作中,将从两个方面对钟驾驭算法进行优化:
1)设置多组钟驾驭时间常数并对其驾驭效果进行比较,选取最优的驾驭时间常数,使驾驭后的CSAC的短期频率稳定度更接近自由运行时的结果;
2)使用如卡尔曼滤波或平均滤波等滤波算法对CSAC的钟差预报参数进行估计,以提升可驯钟的实时驯服能力。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
商界评论(2022年1期)2022-04-13
数学大王·趣味逻辑(2019年10期)2019-11-06
中国电气工程学报(2019年18期)2019-10-21
数学大王·低年级(2018年9期)2018-10-24
草原(2018年2期)2018-03-02
数学大王·中高年级(2017年2期)2017-02-08
学苑创造·A版(2016年4期)2016-04-16
卫星电视与宽带多媒体(2013年1期)2013-04-26
现代电子技术(2009年19期)2010-05-13