基于联合仿真的平行泊车控制策略
2022-03-31 09:00秦国庆冯樱
湖北汽车工业学院学报 2022年1期
秦国庆,冯樱
(湖北汽车工业学院 汽车工程学院,湖北 十堰 442002)
汽车数量的持续增长使城市内车位空间更加紧张,要求驾驶员拥有熟练的驾驶技巧才能在有限的空间内顺利泊车,否则容易引发车辆碰撞事故。而自动泊车系统的应用能够大大降低泊车事故率,提高泊车安全性。国内外学者针对自动泊车系统的研究主要集中在车位识别、路径规划和路径跟踪控制器的设计问题等方面。在车位识别技术上,沈峥楠[1]通过多传感器融合建立了停车位识别模型,利用模糊推理自动识别规则和不规则车位类型;江浩斌等[2]为解决自动泊车系统车位检测精度低的问题,通过多个超声波雷达和视觉传感器数据融合,实现车位边界的高精度探测。针对泊车路径规划方法,张持等[3]采用两段相切圆弧的方式规划平行泊车路径,方法简单、计算效率高,但切点处存在曲率突变;杜文豪[4]在2段相切圆弧的基础上提出多段式路径规划方法,有利于提高跟踪精度、减小泊车位尺寸;黄江等[5]针对自动泊车系统路径规划问题,利用五次多项式对路径做平滑处理,得到曲率连续且符合避障约束的泊车轨迹;李红等[6-7]提出基于B样条理论的平行泊车路径规划方法,改善了泊车路径的跟踪效果,但计算较为复杂;李茂月等[8]为避免自动泊车过程中出现泊车死区,提出在车位外部汽车自动向前行驶至前进水平线的轨迹计算方法。对于泊车控制器的设计问题,Li 等[9-10]使用模糊控制逻辑建立了自动泊车系统控制器模型;郭孔辉等[11]针对泊车过程中车速控制失误导致车辆偏离泊车路径现象,提出了结合定点跟踪的非时间参考路径跟踪控制策略,提高了泊车容错率;姜立标等[12]结合非时间参考路径跟踪控制和终端滑模控制方法,设计出基于趋近律的非时间参考终端滑模路径跟踪控制器;胡远志等[13]分析了泊车过程中遇到动态障碍物的问题,提出基于模型预测控制的自动泊车控制方法。可以看出,现有泊车路径存在曲率突变、难以跟踪或者求解复杂度高、实时性较差的缺点;同时控制器跟踪效果差导致泊车安全性降低,容易发生刮蹭等问题。文中采用曲率连续且计算高效的等速偏移和正弦函数叠加曲线进行泊车路径规划,用模型预测控制算法跟踪期望路径,并加入车位识别控制方法,设计泊车系统控制策略。基于Prescan 和Simulink 进行联合仿真,验证控制器的有效性。
1 车辆运动学模型
车辆在泊车过程中车速不超过10 km·h⁻¹,保持低速运动,不需要考虑轮胎的侧偏特性,所以采用车辆运动学模型,如图1所示。车辆后轴中心的轨迹可以体现车辆泊车过程的轨迹特征,以后轴中心点为参考点建立车辆的运动学方程:
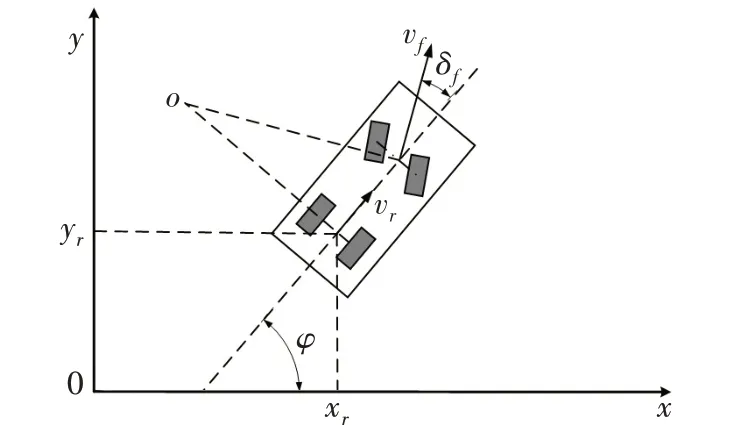
图1 车辆运动学模型

式中:xr、yr分别为车辆后轴中心点横、纵坐标;ẋr、ẏr分别为后轴中点沿x、y轴方向的速度;φ为车辆横摆角;δf为等效前轮转角;vf、vr分别为车辆前后轴中点速度;L为轴距。
2 自动泊车系统设计
自动泊车系统分为车位识别、路径规划和路径跟踪控制。车辆进入泊车环境后,先进行车位识别,当识别到有效车位再根据周围环境状况建立坐标系进行路径规划,在路径跟踪控制器的作用下执行泊车操作。如果车位不满足需求,车辆会继续行驶搜索下个车位。
2.1 最小车位尺寸及路径约束分析
最小车位尺寸大小和路径约束分析是泊车路径规划的前提,满足泊车约束的最小车位尺寸,见图2。采用逆向行驶的方法,假设车辆位于车位内部,O为圆心,以最小转弯半径Rmin驶出车位,所需要的最小车位空间即最小车位尺寸。为确保泊车的安全性,要避免车辆右后顶点C与车位右边界碰撞、右前顶点B与车位左前端点a碰撞。根据图2中的几何关系,解出最小车位长度Lp和宽度Wp:
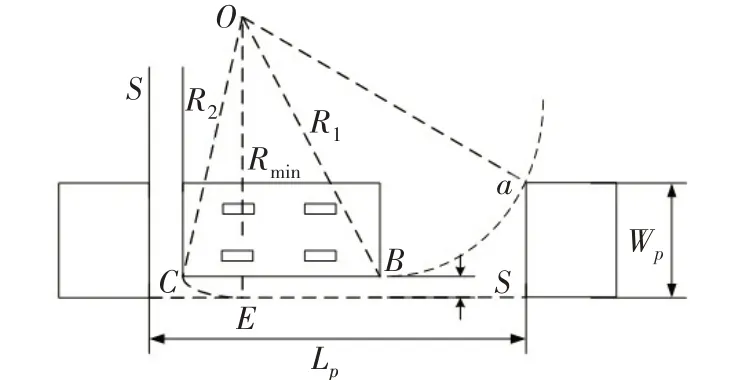
图2 最小车位示意图

式中:δfmax为最大前轮转角;W为车身宽度;R1、R2分别为车辆右前顶点B和右后顶点C的最小转弯半径;S为车辆边界与车位线边界间预留安全距离,取0.2 m。设车宽为1.7 m,前悬为0.77 m,后悬为0.62 m,轴距为2.46 m,前轮最大转角为36.7°。由式(2)~(4)计算出最小车位尺寸为5.67 m×2.2 m,但车辆在泊车结束时前轮处于最大转向角位置,会出现原地转向的情况。因此需要调整车位的长度,最终确定车位尺寸大小为6.5 m×2.2 m。
确定最小车位尺寸后,为确保泊车过程中车辆行驶的安全性,避免主车与车位边界发生碰撞,对泊车过程中存在的障碍约束进行分析。假设主车车身的4 个顶点分别为A(xA,yA)、B(xB,yB)、C(xC,yC)、D(xD,yD);停车位4 个顶点分别为a、b、c、d,以车位左下角c点为坐标原点,车位边界线bc、cd分别为x轴、y轴建立大地坐标系。泊车过程中主车可能发生碰撞的情况,如图3所示。由图3可知,为防止车辆泊车过程中发生碰撞,泊车路径需要满足下列避障约束:

图3 泊车过程车身位置分析
1)主车泊车靠近车位过程中,要防止主车右侧边缘线BC与车位左前顶点a接触,即

2)主车大部分进入车位开始车身回正时,需防止主车右前顶点B与车位前边界线ab碰撞,即

3)主车在车位内要避免右前顶点B与车位右边界bc发生刮擦,即

4)主车在车位内倒退过程中,要避免主车右后顶点C与车位右边界线bc发生碰撞,即

5)主车在车位中要防止右后顶点C触碰到车位后边界线cd,即

6)到达泊车终点后,主车整体处于车位中,即

路径曲线曲率过大或者曲率变化过快可能会导致车辆无法实现有效跟踪。因此,还要求路径曲率小于车辆所能达到的最大曲率,且泊车过程中,车轮转向角速度小于最大转向角速度。
2.2 路径规划
自动泊车系统的路径规划是结合主车和车位的位置关系以及车辆运动学原理,规划一条满足泊车安全性、易跟踪性和停车规范性等要求的路径曲线。等速偏移和正弦函数叠加曲线具备曲率连续、计算简单等优点,能够很好地满足泊车条件[14],路径表达式为

式中:a、b、c为待定常系数。假设泊车路径起始点和终止点坐标分别为(x1,y1)和(x2,y2),可得:

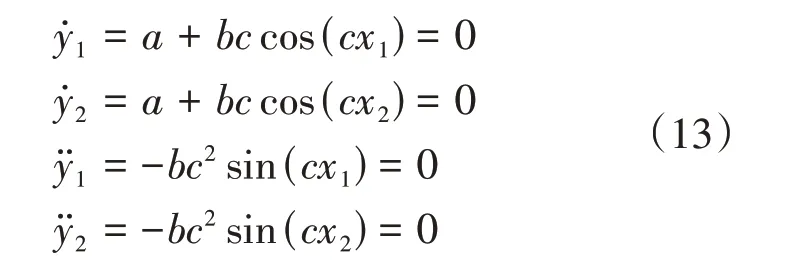
为确保在路径起、止点位置,车身与车位平行且前轮转角刚好处于回正状态,要求路径首点和末点的一阶导数和二阶导数均为0,即
通过上述路径约束条件,泊车路径规划将转换为泊车起始点、终止点位置坐标求解问题。综合考虑车位尺寸以及泊车安全性问题,先确定泊车终点位置为(0.82,1.1),应用MATLAB 的Fmincon 函数求解泊车起点位置。设泊车起始点位置(x1,y1)为优化变量,为使车辆的转向过程尽可能平稳,规定优化目标是使车辆在路径曲线中点位置的横摆角最小化,目标函数为

在满足相应约束条件下求出最优解,确定泊车起始位置为(7.7,3.5),得到泊车路径曲线如图4a所示。为了验证所规划路径是否满足避障要求,假设车辆能够无偏差地跟踪泊车路径,用矩形近似代替车身外形,用MATLAB 绘制出泊车过程中车身轮廓包络线,结果如图4b 所示。在理想跟踪状态下,车辆整个泊车过程中不会与车位边缘发生碰撞,泊车路径曲率变化如图4c 所示,可以看出:曲率在-0.279~0.279连续变化,不超过车辆所能达到的最大曲率0.303,并且在起始点和终止点处的曲率为0,且车轮处于回正状态。因此,该路径能够作为有效泊车路径。
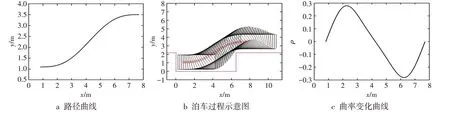
图4 泊车仿真曲线
2.3 路径跟踪控制器
模型预测控制是利用所建立的系统模型、系统当前的状态和未来的控制量去预测系统未来的输出,滚动求解带约束的优化问题来实现控制目的,具备预测模型、滚动优化和反馈矫正的特点[15]。对于泊车过程,采用车辆的运动学模型设计控制算法,此非线性系统可表示为

式中:u为系统输入;ξ为状态量。对于确定的期望路径,可以得到每时刻的系统参考状态量ξr和控制量ur,在f(ξr,ur)处对式(15)进行泰勒展开,仅保留低阶项,可得:
联合式(15)~(16),得到线性化的车辆运动学模型,并进行近似离散化处理,可得:
式中:T为采样周期。将状态量和控制量组合作为新的状态量ξ(k|t),得到新的状态空间表达式:
为了使车辆能够快速且平稳地跟踪规划路径,定义目标函数:

式中:Np、Nc为预测时域和控制时域;Q和R为权重矩阵;ρ为权重系数;ε为松弛因子。受车辆参数限制,对前轮转角和前轮转角增量范围设置如下:

在每个控制周期内对目标函数求解,得到控制时域内一系列控制增量,将第1个解作为实际控制增量输入系统,后续控制过程重复上述步骤。
3 仿真分析
Prescan 作为无人驾驶仿真软件,支持基于视觉传感器、超声波雷达、激光雷达等多种ADAS 系统开发应用。基于Prescan 仿真平台搭建泊车场景,通过传感器将车辆状态信息传递给Simulink中的泊车控制器,控制器将控制量输入Prescan 车辆模型,实时更新泊车场景中的车辆状态,信息交互如图5所示。
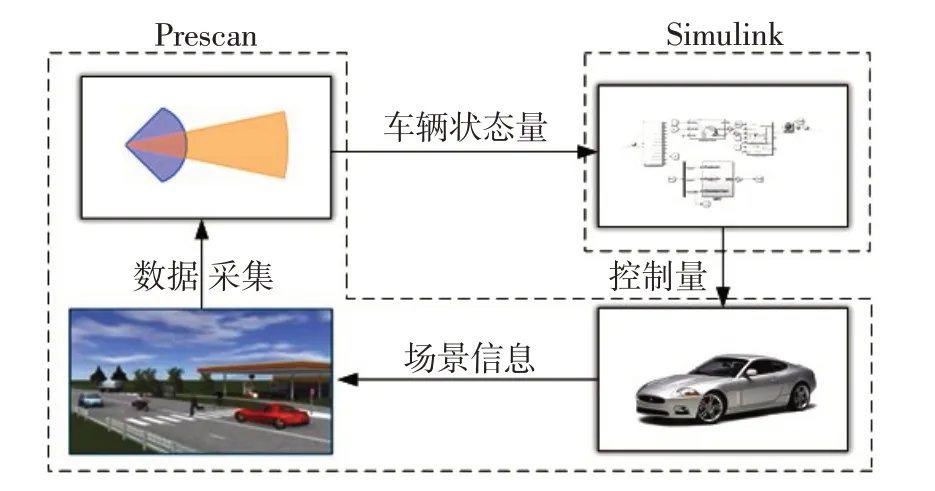
图5 Prescan和Simulink信息交互图
3.1 车位识别仿真验证
进入泊车场景后,车辆匀速向右行驶,超声波雷达会在道路右侧先后探测到障碍车Ⅰ和障碍车Ⅱ,障碍车之间设置平行车位,如图6所示。
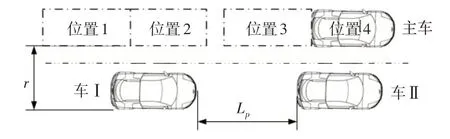
图6 车位识别示意图
当主车到达位置1 时,接近车Ⅰ尾部,车辆右侧的超声波传感器探测距离会发生骤降,系统判断出该车位已被占用;当主车继续前进至位置2 时,逐渐远离车Ⅰ,超声波传感器探测距离会出现上升沿突变,如果此时探测距离r大于2 m,系统认定为空位,该位置被定为车位线后端。当主车到达位置3 时,接近车Ⅱ,超声波传感器探测范围发生下降沿突变,系统将该位置定为车位线前端,车位前端至后端车辆的行驶距离Lp,即为车位长度。如果车位尺寸大于平行泊车最小车位要求,则该车位被判定为有效车位,车辆将继续行驶一段距离到达位置4(规划的泊车起始位置)后停车,进入泊车环节,车位识别过程中传感器探测距离变化见图7。车位识别过程中,主车始终保持低速直线运动,跟踪误差可忽略,故仅对泊车过程中产生的误差进行分析。
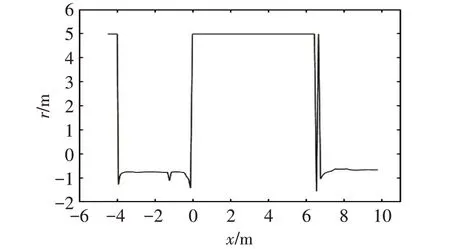
图7 传感器探测距离变化曲线
3.2 泊车仿真验证
考虑到泊车过程中车速的波动,分别设置恒定车速1 m·s-1、2 m·s-1以及变车速(0.5sint+1)m·s-1不同泊车工况,泊车起点坐标为(7.7,3.5),泊车终点坐标为(0.82,1.1),分别对3 种泊车工况进行Prescan 和Simulink联合仿真。为验证泊车过程的安全性,对泊车期间主车与障碍约束点的最小距离进行分析,如图8所示的障碍点1和2。l1、l2分别为主车与障碍点的最小间距值,当间距大于0 时,则说明主车能安全通过,且间距越大,安全性越高。泊车过程中最小间距l1、l2具体数值见表1。

图8 泊车过程中障碍约束点分析示意图

表1 障碍约束点处最小间距值 m
由表1 可知,3 种工况下主车在障碍点1、2 处与障碍约束点最小间距值均大于0,满足防碰撞要求。工况1中2处的最小间距值均大于0.2 m,整体上安全性最高;而工况2的危险性相对偏高,在2处与障碍点的最小间距仅0.15 m,可能是由于车辆泊车结束时姿态倾斜导致。车速提高后,泊车安全性会有所降低。
泊车过程中控制器跟踪效果见图9。由图9a可知,路径曲线整体上过渡平滑,在3 种泊车工况下,车辆都能够顺利地跟踪参考路径,控制器有效。由图9b可得,工况1和工况2的横向跟踪误差峰值分别为0.006 m和0.019 m,表明跟踪误差会随着车速的增大而增大;工况3的跟踪误差最大值为0.016 m,与工况1 相比变化不大,说明车速小范围波动的情况下,该控制器都具有较强的鲁棒性。由图9c 可知,泊车过程中前轮转角均不超过允许最大前轮转角,转向过程保持稳定、无突变;3种工况下泊车终点处的前轮转角都不超过3°,较小转角忽略不计,认为此时车轮已经回正。从图9d 可看出,3 种工况下泊车终点处车辆横摆角均不大于2°,认为车身最终与车位保持平行,停放姿态较好。

图9 不同工况下泊车过程中控制器跟踪效果图
4 结论
采用逆向行驶方法推算最小车位尺寸,对泊车过程中易发生碰撞的情况进行分析,在考虑路径约束的条件下,采用等速偏移和正弦函数叠加曲线规划出转向平稳且曲率较小的路径。根据MPC 算法设计路径跟踪控制器,在不同工况下进行Prescan 和Simulink 联合仿真,该控制器都满足安全性要求、具有较高的跟踪精度。未来将基于传感器融合技术进行多种车位识别,针对不同车位设计泊车控制算法,进行泊车系统实车试验。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
新疆大学学报(自然科学版)(中英文)(2022年3期)2022-06-04
汽车实用技术(2022年7期)2022-04-20
昆明医科大学学报(2022年1期)2022-02-28
汽车工程(2021年12期)2021-03-08
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
军民两用技术与产品(2020年3期)2020-04-07
现代家长(2018年11期)2018-01-05
东方教育(2017年19期)2017-12-05