一种水下探伤机器人动力定位控制方法*
2022-04-07 03:43高宏博戴晓强钱金伟朱延栓
计算机与数字工程 2022年3期
高宏博 戴晓强 赵 强 钱金伟 朱延栓
(江苏科技大学电子信息学院 镇江 212003)
1 引言
水下机器人(Remotely Operated Vehicle,ROV)在水下作业过程中,探伤仪等工具动作会引起自身动力学模型参数发生变化[1],其本体也会受到作用力影响。这种由于模型参数变化引起的动力定位控制精度问题,将直接导致探伤ROV 作业过程稳定性能差、工作效率低。
针对上述问题Hussain 等[2]运用自适应控制和RBF 神经网络控制相结合的方法实现ROV 控制系统设计,并用仿真证明了系统具有良好的控制信号收敛性能和跟踪性能。Heping Liu 等[3]利用神经网络逼近流体动力学不确定性和扰动上限,通过艏向控制测试证明了该控制策略的可行性。Li JH 等[4]提出了一种自适应神经网络控制方法,通过神经网络对不确定扰动进行近似估计,证明了俯仰运动过程中的稳定性,但是反步法设计过程中存在控制量导数阶数过高,计算量太过复杂。王开红等[5]基于滑模变结构算法设计一种水下机器人控制系统,利用神经网络对滑模趋近率在线调整,但未考虑外部环境干扰等问题且收敛速度较慢。
鉴于以上研究基础本文首先建立探伤ROV 六自由度运动模型,并在机械手展开前后引起的ROV 动力学模型变化进行分析;其次给出逼近模型参数不确定性的神经网络具体公式,再次设计自适应滑模控制器,对控制参数在线调整,最后在李雅普诺夫稳定性理论下证明系统渐近稳定。通过对本文研制的探伤ROV 进行水池动力定位实验以及金山湖空间运动实验,验证了本文方法的有效性。
2 ROV动力学模型
以江苏科技大学自主研发的开架式水下探伤ROV 作为研究对象,建立坐标系,如图1所示,选择水下探伤机器人的质心作为载体坐标系原点。定义水下探伤ROV运动参数,如表1所示。

图1 载体坐标系示意图
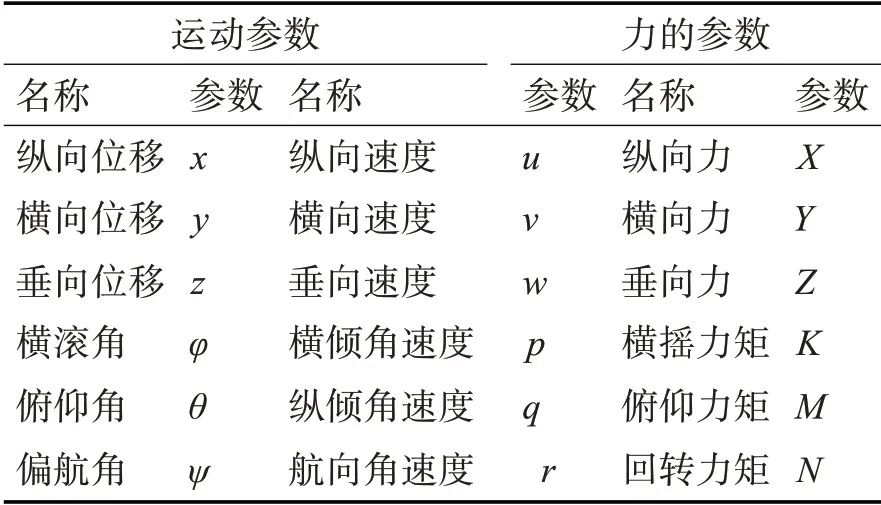
表1 参数定义
在实际运动过程中,水下机器人动力学模型可用如下表达式描述:
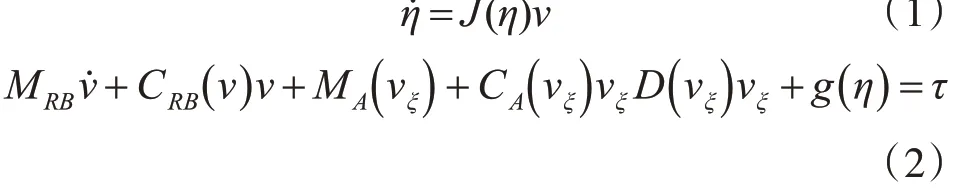
其中η=[x y z φ θ ψ]T,为地理坐标系下ROV位置和姿态角;v=[u v w p q r]T,为ROV 速度矢量;,为坐标转换矩阵;MRB为ROV 惯性矩阵,MRB∈R6×6;CRB(v)为科氏向心力矩阵,CRB(v)∈R6×6;MA为外力作用引起的附加惯性矩阵,MA∈R6×6;CA为外力扰动下的科氏向心力矩阵,CA(vξ)∈R6×6;D(vξ)为ROV 流体阻力矩阵,D(vξ)∈R6×6;g(η)为 回 复 力 矩 阵,g(η)∈R6×1;τ为ROV推进器提供的推力,τ∈R6×1。
考虑机械手展开过程导致的模型参数不确定项和水流、波浪等未知干扰项带来的影响[6]。假设ξ为环境干扰力,ξ∈R6×1,vd为地理坐标系下伴随干扰力产生的速度,vξ=v-vd,此处假设vd为慢时变的,满足̇ ≈0,且C(v)=CRB+CA,则ROV实际动力学模型应调整为

水下探伤ROV 重心xG=yG=zG=0,模型中的惯性矩阵M为

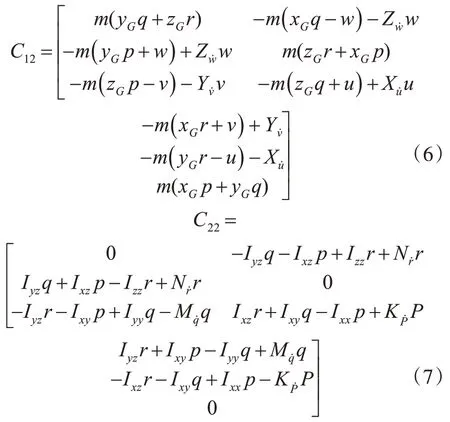
C(v)由科里奥利向心力以及附加质量矩阵构成,表示为

式中:
流体阻尼力矩阵D(v)表示为

回复力矩阵g(η)表示为
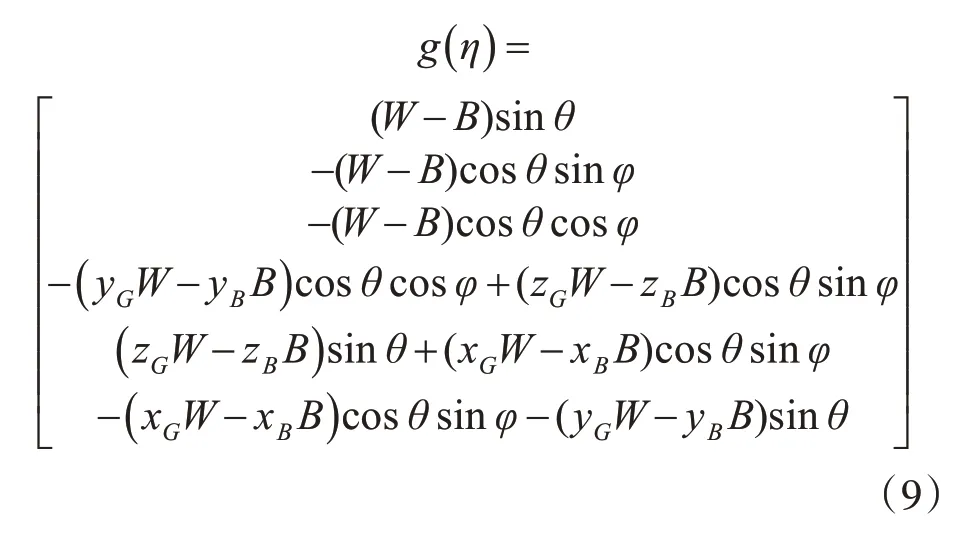
式中,W、B分别为水下探伤ROV 的重力和浮力,xB、yB、zB为浮心。
通过对机械手作业前后的ROV 系统动力学模型解耦[7],得到水下探伤机器人在单个自由度方向上的动力学模型,在地理坐标系中表示为

式中,Mμ为惯性系数,μ为ROV 速度矢量,dμ及dμ||μ表示阻尼常数,gμ表示ROV 竖直方向上的合力分量,τμ表示ROV 在运动方向上推进系统提供的动力。
3 ROV动力定位控制方法
3.1 RBF网络自适应滑模控制方法研究
针对水下探伤机器人作业过程中因波浪干扰和机械手动作引起的ROV模型参数不确定性[8],进而导致的动力定位控制精度差等问题,提出一种RBF神经网络自适应滑模控制方法,在李雅普诺夫稳定性定理下证明本文提出的控制方法收敛稳定。
3.1.1 建立状态空间表达式
在地理坐标系下姿态跟踪误差x1、x2,η为ROV当前时刻姿态信息,ηd为期望姿态矢量,有如下表达式:

将ROV 动力学模型转换为2 阶非线性被控对象,通过该状态空间表达式可将ROV 模型中的不确定性部分和外界干扰构成未知项函数[9~11],方便下一步滑模面设计和RBF神经网络在线逼近。
根据式(1)、(2)、(11)、(12),建立如下非线性不确定系统的状态方程:
式中:


3.1.2 RBF网络在线逼近模型参数和外界干扰
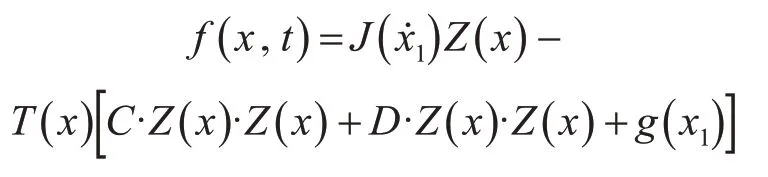
在ROV 实际作业过程中,存在辅助工具动作引起的参数不确定项f(x,t)和其他因素d(t),包括水流、风浪等未知不定项。将f(x,t)、d(t)构成不定项集合并用F(x,t)表示,通过神经RBF 网络对F(x,t)进行在线逼近[12]。其中F(x,t)如下表示:

采用RBF神经网络逼近F(x,t),表示为

式中,W*T为网络理想权值;ϵ为网络逼近误差。
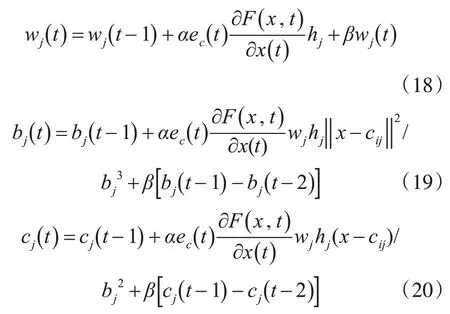
为了使RBF神经网络更好地进行学习,采用梯度下降方法分别对输出权值等参数进行迭代[13~14],网络的学习算法表示为
3.1.3 滑模控制器和自适应律设计
设计滑模面[15~16]为

其中,e=x1-xd为系统跟踪的实时误差;ė=x2-ẋd为变化率;c>0 且为常数。
将本文设计的滑模面进行求导,同时将ROV模型转换得到的状态空间方程带入该式得:

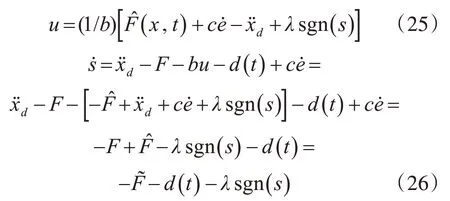
设计滑模控制率为

将式(23)带入式(22)可得:

存在 |d(t)|≤D,λ≥D,使得sṡ≤0。
RBF 神经网络的输出为F̂=ŴTh(x),带入式(22)、式(23)可写为
式中:


3.2 稳定性证明
选取Lyapunov函数为

对L求导,并将̇和滑模控制律带入得:
将自适应律带入式(30)得:

在RBF 网络逼近过程中,ϵ可以足够小,取λ≥ϵ0+D。存在λ0>0,λ≥λ0+ϵ0+D,使得:

由于L≥0,L̇≤0,根据李雅普诺夫稳定性理论可知,ROV 动力定位控制系统的跟踪误差全局渐进稳定,并且滑模面和自适应律一致稳定有界,证明完毕。
4 实验验证
4.1 ROV样机和测试环境
本文ROV 样机如图2 所示,测试环境如图3 所示。
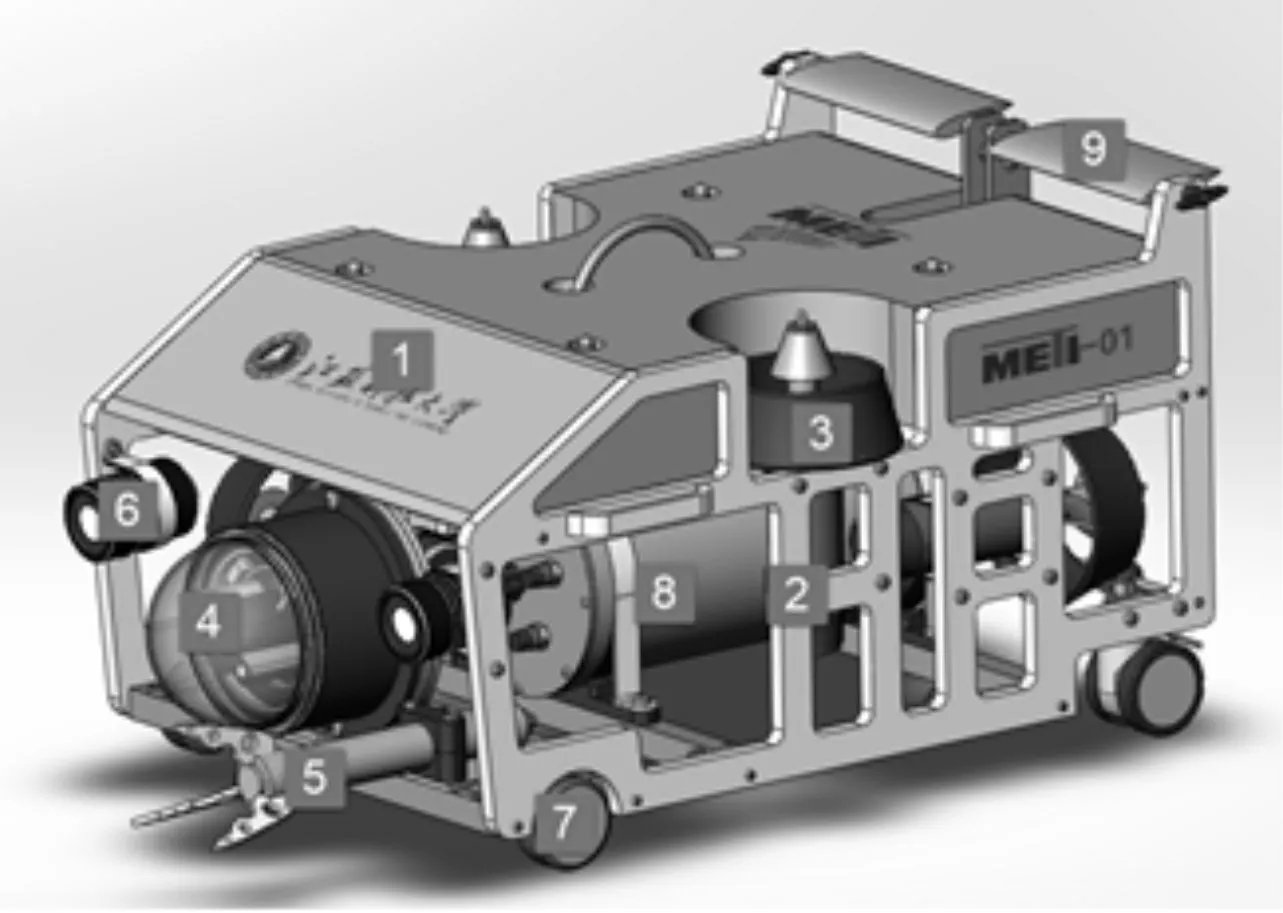
图2 水下机器人系统及ROV样机
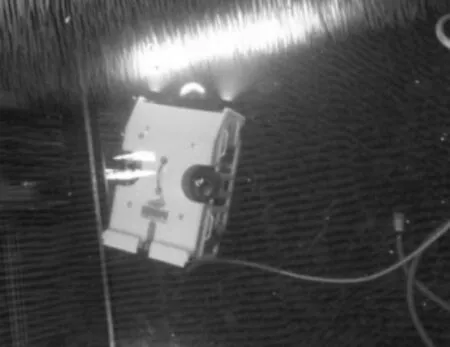
图3 水池实验
其中ROV 样机为开架式结构,实验水池长5m、宽5m、深5m,通过手动施加干扰模拟实际环境中水流波浪。
4.2 对比实验
探伤ROV系统参数见表2~3。

表2 惯性参数

表3 阻尼系数
探伤ROV 作业过程中的主要干扰因素是水流和波浪,通常采用PM谱对其进行分析[17]。
采用如下表达式描述波浪运动情况:
式(33)、式(34)中,vwavex、vwavez表示波浪在水平和垂向两个自由度上的速度。
4.2.1 艏向、垂向运动控制实验验证
分别在平稳环境和存在外部扰动情况下,对艏向上的目标轨迹ψ=10 sin( 0.015πt)+50 进行跟踪,实验结果如图4、5所示。

图4 无干扰下艏向跟踪曲线
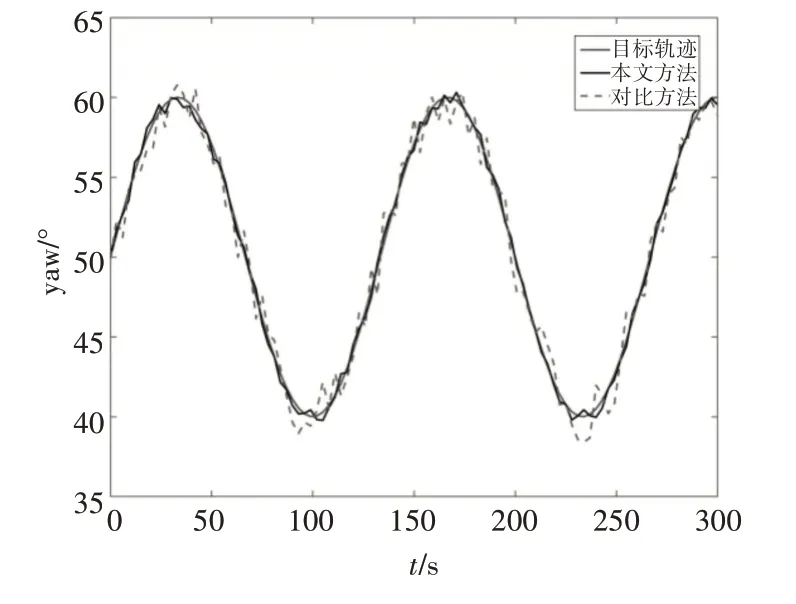
图5 波浪干扰下艏向跟踪曲线
分别在平稳环境和存在外部扰动情况下,在垂向上对预先设定的深度轨迹进行跟踪,其目标轨迹表达式为H=0.1 sin( )0.03πt+2,实验结果如图6、7所示。
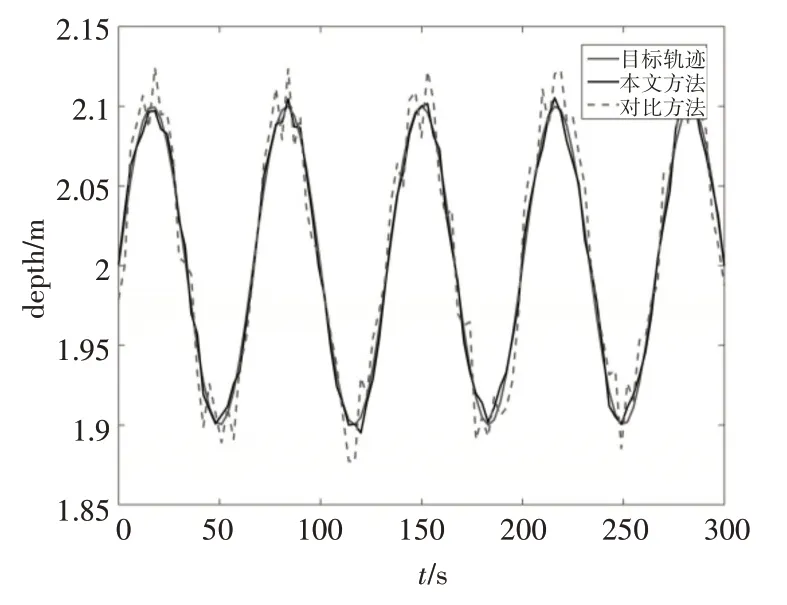
图6 无干扰下垂向跟踪曲线
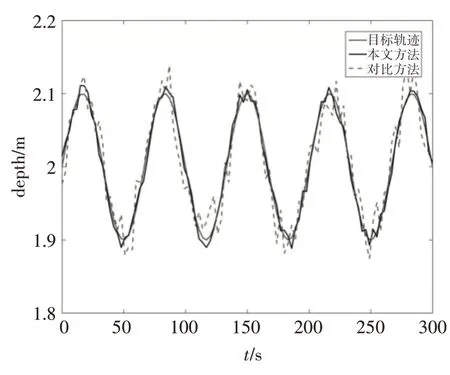
图7 波浪干扰下垂向跟踪曲线
水下机器人在水池内的水平方向做转艏及竖直方向做升降运动,能够按照设定的轨迹运动并到达指定位置。水池测试实验结果如表4所示。

表4 误差数据对比
在艏向上对目标轨迹进行跟踪,通过RBF神经网络对波浪扰动的干扰函数进行在线逼近。存在扰动情况下,本文控制方法误差均方差、最大误差及平均误差分别为0.23°、0.39°、0.03°,对比传统自适应滑模控制方法误差百分比分别降低71.9%、75.6%、62.5°。在对垂向轨迹进行跟踪,本文控制方法误差均方差0.0078m,相比于传统自适应滑模控制方法降低76.4%,最大误差为0.015m,相比于传统自适应滑模控制方法降低72.2%,平均误差为0.0021m,相比于传统自适应滑模控制方法降低60.4%。实验数据结果表明,本文动力定位控制方法的效果明显优于传统自适应滑模控制方法。
4.2.2 金山湖定点动力定位实验
水池内完成基本运动控制实验后,在金山湖完成空间内动力定位实验,空间内轨迹跟踪如图8 所示。
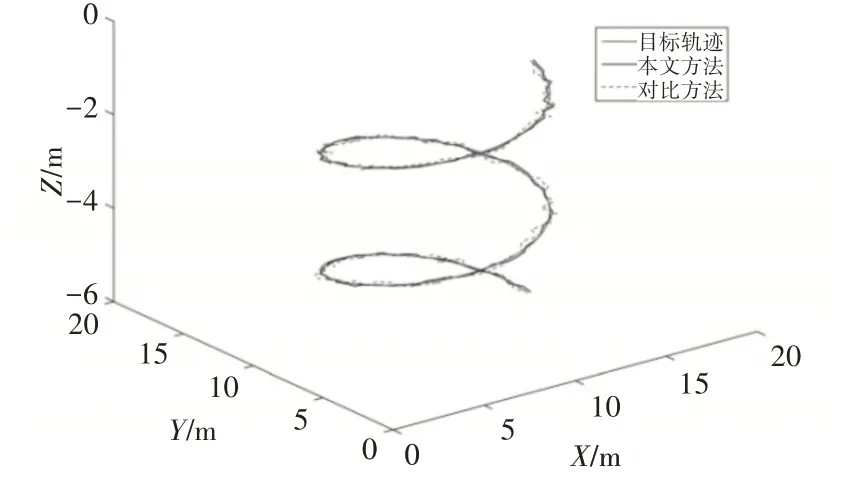
图8 动力定位轨迹
5 结语
针对ROV 在实际过程中的作业精度与鲁棒性需求,并考虑外部扰动引起的模型参数不确定性问题,提出了一种RBF 神经网络自适应滑模控制策略,通过RBF神经网络对波浪扰动的干扰函数进行在线逼近,解决了传统自适应滑模控制在ROV 动力定位过程中轨迹跟踪精度低和对外部干扰敏感的问题。最后通过实验结果表明,相比较传统自适应滑模控制方法,本文所提出的动力定位控制方法定位误差小、鲁棒性能好。
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
舰船科学技术(2022年10期)2022-06-17
西部交通科技(2022年2期)2022-04-27
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
电机与控制学报(2019年10期)2019-12-03
速读·上旬(2019年2期)2019-10-21
读与写·教育教学版(2017年10期)2017-11-10
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10