
基于模糊算法的轮毂马达控制策略研究
2022-04-18 09:21姚斌林温建金寅德
时代汽车 2022年8期
关键词:控制
姚斌 林温建 金寅德

摘 要:重型车辆在国家基础设施建设和快速发展中,具有不可或缺的重要地位。重型车辆在加装轮毂液驱系统后,液压系统的轮毂马达控制便成为其中至关重要的一个环节。在通过复杂路况时,通过轮毂液驱系统的马达助力,可以显著提升车辆的牵引力和通过性能。本文通过模糊PID控制器控制实现对轮毂马达的转速性能控制,从而提高系统的响应速度和控制精度。
关键词:轮毂马达 模糊PID 控制
1 前言
重型车辆在国家基础设施建设和快速发展中,是作为一种重要的运载工具,在我国现代化建设过程中,具有不可或缺的重要地位。目前,國内市场对重型车辆的需求不断扩大,国外各大重型汽车品牌也开始进军我国市场,重型车辆市场竞争愈来愈白热化。面对不断升级的国内外竞争,努力提高我国重型车辆车企的核心技术,不断开拓创新,是我国国内重型车辆生产制造企业生存发展的当务之急。
随着国家基础建设需求不断提升,重型车辆经常被要求在复杂的路面环境下行驶,有些行驶工况甚至较为恶劣,这些路面环境附着系数低,整车容易出现车轮打滑的情况,进而导致驱动力不足,这对重型车辆的牵引性能和底盘性能提出了更高的要求。
传统的机械式全轮驱动方案虽然在一定程度上能提高重型车辆的牵引能力,但其结构复杂,传动效率较低。轮毂液驱系统是新兴的解决重型车辆牵引能力的一种思路,系统通过电液比例阀,带动安装在非驱动轮轮毂内的液压马达,由其适时地向车辆提供辅助驱动力,从而提高重型车辆在复杂工况工况下的驱动力。相较于传统的机械式全轮驱动系统,轮毂液驱系统结构较简单,过载能力强,控制策略灵活,较低系统重量。因此,搭载了轮毂液驱系统的重型车辆具有良好的应用前景,市场竞争力更强。
重型车辆在加装轮毂液驱系统后,液压系统的轮毂马达控制便成为其中至关重要的一个环节。系统的一部分动力通过液压油从而驱动轮毂马达转动,进而实现适时四驱运行,使其输出功率与工况需求相匹配。因此,本文就重型车辆的轮毂液驱系统的液压马达,研究系统控制策略,从而提高重型车辆在复杂工况下的牵引力和通过性能。
2 轮毂马达液驱系统模型结构
重型汽车在通过复杂路况时,通过轮毂液驱系统的马达助力,可以显著提升车辆的牵引力和通过性能。在助力模式下时,发动机动力通过变速箱等传动机构传递到后轮,而电液比例阀带动安装在非前轮轮毂内的液压马达,实现适时四驱。
由此可见在重型车辆轮毂液驱系统模型中,发动机的输出动力通过两条路线,分别传递到前后车轮。其中一条是经离合器、变速器、传动轴、主减速器和差速器,传递到后轮驱动车轮。另外一条是取力器将发动机的一部分动能通过电液比例阀,带动带动前轮轮毂内的液压马达运动。
液压马达作为轮毂液驱系统中的核心元件,其选型也至关重要了。为了保证车辆在复杂路况下,能有足够的牵引力,液压马达必须在助力时输出大扭矩,且应具有高负载力、低惯性等特点,因此选择径向柱塞式轮毂马达较为适合系统要求。在选择液压马达的参数时,因以车辆行驶在复杂路况下失去牵引力时发动机传递到前轮的动力值,以及电液比例阀所提供的流量、功率的要求来确定液压马达的设计参数。
在轮毂马达转速和输出转矩理论计算时,假设电液比例阀的输出流量,等量流入两个前轮轮毂马达中,则轮毂马达转速为:
轮毂马达的输出转矩为:
其中,n为轮毂马达的转速,q为电液比例阀的额定流量,V为轮毂马达排量,T为轮毂马达的输出转矩,为轮毂马达进出油口压力差。
3 轮毂马达控制策略
在轮毂马达液压系统中,马达转速的控制一般通过PID控制器来实现,但是PID控制器一般对线性模型控制精度较高,对于非线性、强耦合的系统难以达到理想的控制效果难。因此在很多非线性的控制模型中,采用了模糊算法、神经网络算法、专家算法等控制算法,从而达到预期的控制效果。本论文针对轮毂马达的控制,采用模糊PID算法实现控制转速。
轮毂马达的控制驱动主要是根据车辆行驶状态以及当前液驱系统实时状态来进行控制,通过电液比例阀,进而控制轮毂马达的输出。
在轮毂马达控制系统中,控制对象是轮毂马达的转速性能控制,因此可将马达的转速的偏差以及偏差的变化率设定为控制器的输入变量。利用模糊控制器,从而实现对PID控制器中比例、微分、积分变量的调整,进而提高系统的响应速度和控制精度,如图1所示。
图1,r(t)为系统期望值;y(t)为系统实际输出值;e和ec分别代表了系统偏差和偏差变化率;E和EC分别代表模糊后系统偏差和偏差变化率;KP,KI,和KD分别代表了模糊PID控制器中的比例、积分和微分控制参数。轮毂马达通过模糊PID控制器使y(t)达到期望值r(t)。
设计的模糊PID控制器将被控对象轮毂马达的转速偏差和转速偏差变化率作为控制器的输入变量,通过分析两者的变化来决定输出变量KP,KI,和KD。在控制参数模糊化前,首先要确定其基本语言值,然后根据语言值确定其隶属函数和论域。一般来说,一个语言变量的语言值越多,对事物的描述就越准确,可能得到的控制效果就越好。不过,过细的划分反而有可能使控制规则变得很复杂。因此,应依据具体情况而定。
本系统中设计的模糊PID控制器将转速偏差和转速偏差变化率的论域量化为[-5,5],将变量e和ec模糊化,其对应的模糊变量分别为很低(NM),比较低(NS),适中(O),比较高(PS),很高(PM)五个模糊子集,即:
e={NM,NS,O,PS,PM}
ec={NM,NS,O,PS,PM}
对于隶属函数的确定主要靠经验,即总结实验中的操作经验,根据实验中测得的数据,对隶属度值进行相应的拟合,发现在设计轮毂马达模糊PID控制器时可采用三角函数作为隶属函数,同时三角函数具有形状简单,计算工作量小,而且三角形状的隶属函数比正态隶属函数更具有较大的灵敏度,当存在偏差时,就能迅速的产生相应的控制信号。
模糊控制器设计的核心是通过总结理论知识以及实验中的操作经验,建立合适的模糊规则表,本系统通过分析轮毂马达转速偏差E和转速偏差变化率EC的变化来计算输出变量KP,KI,和KD的值。当轮毂马达转速偏差E较大时,为缩短系统响应时间,取较大的KP;当轮毂马达转速偏差E和转速偏差变化率EC为中等数值时,为避免控制系统出现较大的超调,则取较小的KP和适当的KI;当轮毂马达转速偏差E较小时,取较大的KP和KI值,同时根据变化率EC,选取合适的KD值。
模糊变量的清晰化方法有很多种,本系统采用加权平均判决法对变量进行清晰化处理,为简单起见,选取隶属函数作为加权系数。这种计算方法类似重心的计算,所以在很多情况下也称其为重心法。用上述方法,输入模糊PID控制器的轮毂马达转速偏差E和转速偏差变化率EC的每一个值,都能够用加权平均判决法计算出确定的输出值,根据模糊控制规则以及模糊变量的清晰化方法,对所有可能的输入,都进行离线计算,最终实现精准控制。
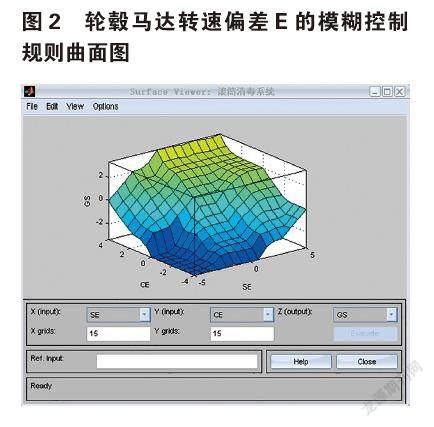
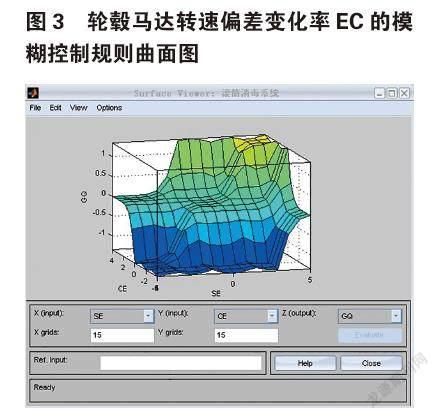
利用MATLAB软件绘制出轮毂马达转速偏差E和转速偏差变化率EC的模糊规则曲面图,如图2和图3所示。
该窗口以图形的形式显示了模糊推理系统的输入输出特性曲面,在该窗口内可用菜单选项改变相应的参数可以查看不同性质的图像。由图像观察,所建立的轮毂马达模糊PID控制推理系统的输入输出特性曲面较为光滑,没有突变,曲面性能较好。
4 结语
重型汽车在通过复杂路况时,通过轮毂液驱系统的马达助力,可以显著提升车辆的牵引力和通过性能。本文通过模糊PID控制器控制实现对轮毂马达的转速性能控制,从而提高系统的响应速度和控制精度。
基金项目:2021年浙江农业商贸职业学院科研项目(青年专项)“轮毂液驱系统热力学建模及控制策略研究”(KY202122)。
参考文献:
[1]王立新.自适应模糊系统与控制[M].北京:国防工业出版社,1995.
[2]李思升,何晓晖,王强,张涛.某电控液驱车辆比例阀控马达系统特性研究[J].液压与气动,2020,(5):145-150.
[3]贺辉.重型卡车轮毂马达液压驱动系统建模与控制策略研究[D].吉林大学,2014.
猜你喜欢
商业会计(2016年13期)2016-10-20
科技视界(2016年21期)2016-10-17
商(2016年27期)2016-10-17
科学与财富(2016年28期)2016-10-14
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
