
水面舰艇与反潜巡逻机协同检查搜潜队形配置研究
2022-04-21 05:13孙秀文
指挥控制与仿真 2022年2期
唐 晨,孙秀文,吴 刚
(海军指挥学院,江苏 南京 210016)
搜潜是反潜作战的重要前提。随着潜艇降噪、规避搜潜等方面技术的发展,搜索发现潜艇变得更加困难。舰机协同检查搜潜,由于可以实现兵力优势互补、提高搜索发现效能,在检查搜潜中运用较为普遍。水面舰艇与反潜巡逻机协同检查搜潜是一种常见的搜潜编组形式,主要在搜索海域范围广、潜艇存在可能性大、搜索时间比较长时使用。其中,水面舰艇主要使用舰壳声呐、拖曳线列阵声呐等装备搜潜;反潜巡逻机主要使用声呐浮标、磁探仪等装备搜潜。检查搜潜的目的是搜索发现指定海域中的潜艇,或是将指定海域搜扫干净,尽可能地排除里面的潜艇。对水面舰艇与反潜巡逻机协同检查搜潜问题进行建模分析,得出较优化的队形配置,对搜潜实践具有一定的理论指导意义。受篇幅所限,这里研究讨论水面舰艇使用舰壳声呐与反潜巡逻机布设声呐浮标协同检查搜潜的队形配置。
1 水面舰艇与反潜巡逻机协同检查搜潜的一种队形
水面舰艇与反潜巡逻机协同检查搜潜时,水面舰艇位于搜索带一端,采用单横队直航向机动搜索潜艇;反潜巡逻机在搜索带的两侧布设声呐浮标阵,以发现低速向搜索带两侧规避的潜艇,如图1所示。这里的队形,实际上是指水面舰艇与反潜巡逻机布设的声呐浮标阵的队形。

图1 队形示意图
2 水面舰艇与反潜巡逻机协同检查搜潜队形建模分析
不妨假设在宽为、长为的搜索带内,可能存在某潜艇。上级计划派遣水面舰艇与反潜巡逻机实施协同检查搜潜,现需要配置协同检查搜潜队形。要确定搜潜队形,主要需要解决两个大问题:一是水面舰艇的队形和位置点;二是声呐浮标的阵形和位置点。
2.1 水面舰艇的队形和位置点
为建模方便,设定为同型舰艇。水面舰艇位于搜索带的一端,采用单横队搜索,其声呐作用区的宽度至少要覆盖搜索带的宽度,如图2所示。因此,水面舰艇的队形宽度为
=-2
(1)
式中:为水面舰艇的队形宽度;为水面舰艇声呐的作用距离。
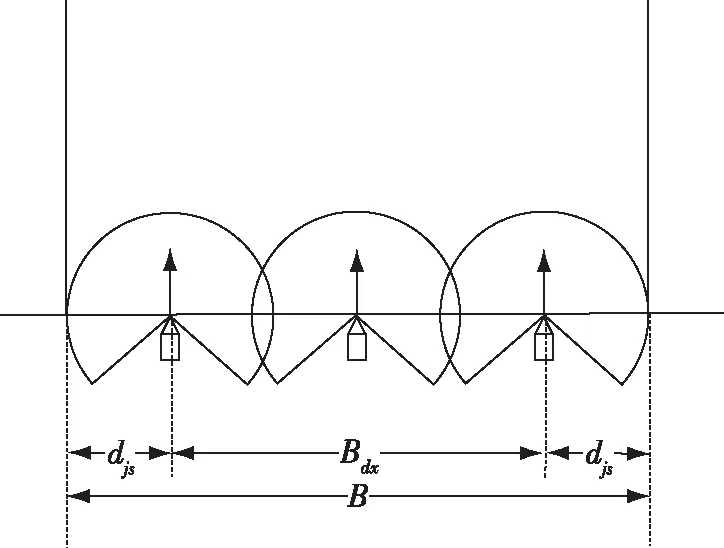
图2 水面舰艇队形示意图
由已有文献可知,相邻舰艇声呐作用区应有一定的重叠,以有效防止潜艇从水面舰艇之间区域逃脱。如图3所示,水面舰艇的队形宽度为
=(-1)
(2)
式中,为水面舰艇的数量;为间隔系数,通常∈[1,2]。由(1)、(2)式,可得水面舰艇的数量为
(3)
当确定水面舰艇的数量和队形宽度后,易得各水面舰艇的具体位置点。

图3 水面舰艇队形示意图
2.2 声呐浮标的阵形和位置点
2.2.1 声呐浮标的阵形
声呐浮标配置在搜索带的两侧,采取直线阵,配置方向与水面舰艇的航向平行。配置时,反潜巡逻机与水面舰艇的行动应有效协同,以保证潜艇在规避水面舰艇搜索时,能够进入声呐浮标作用区。实现协同的方法是使反潜巡逻机活动周期与水面舰艇通过浮标障碍所需要的时间相等,即声呐浮标阵的长度等于水面舰艇在浮标工作时间内的航程。
=
(4)
式中,为声呐浮标阵的长度;为水面舰艇的搜索速度;为声呐浮标工作时间。并且相邻声呐浮标作用区应有一定的重叠,以有效防止潜艇从声呐浮标之间区域逃脱。如图4所示,声呐浮标阵的长度为
=(-1)
(5)
式中,为声呐浮标的作用距离;为声呐浮标的数量;为间隔系数,通常∈[1,2]。
由(4)、(5)式,可得需要的声呐浮标的数量为

(6)

图4 声呐浮标阵形示意图
2.2.2 声呐浮标的位置点
确定了声呐浮标的阵形,还需要确定声呐浮标的位置点。先确定左右两侧基准浮标相对于侧翼舰艇的位置点。有了基准浮标的位置点,根据声呐浮标的间隔和布设方向,就可以依次确定其他声呐浮标的位置,最终可以完成整个队形配置。
基准浮标为点、点的声呐浮标,如图5所示。确定基准浮标的位置,即要确定声呐浮标和侧翼舰艇的最小间隔,以及基准浮标到水面舰艇队列线的距离。
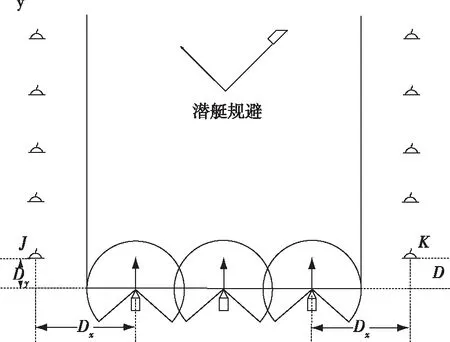
图5 队形配置示意图
1)声呐浮标和侧翼舰艇的最小间隔
声呐浮标阵与水面舰艇的航向平行,如图5所示。当声呐浮标在侧翼舰艇正横位置时,与侧翼舰艇的间隔最小。该间隔要保证水面舰艇航行噪音和声呐工作不能干扰浮标工作。因此,
=
(7)
式中,为水面舰艇航行噪音和声呐工作不干扰浮标工作的最小距离,可以通过实测获得。
2)基准浮标到水面舰艇队列线的距离
水面舰艇的作用是发现水面舰艇搜索带内的潜艇,声呐浮标阵的作用是发现企图向水面舰艇搜索带两侧规避的潜艇。水面舰艇与声呐浮标阵协同时,要使规避水面舰艇搜索的潜艇进入声呐浮标阵。因此,声呐浮标阵应该布设在潜艇最有可能规避水面舰艇搜索的航向前方。
首先,确定潜艇最为有利的规避航向。


(8)
式中,为潜艇的规避速度。如图6所示。
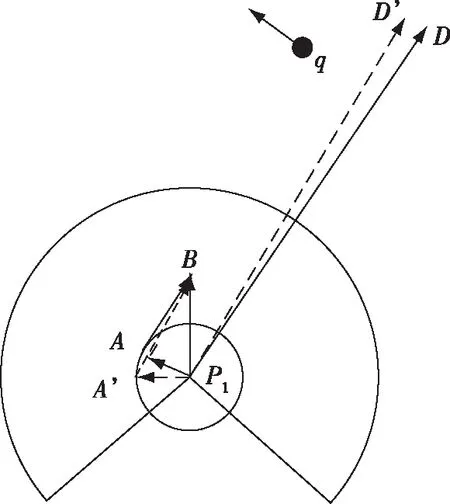
图6 左侧舰艇与潜艇相对运动示意图
其次,确定潜艇可能逃脱水面舰艇搜索的区域。

图7 潜艇可能逃脱水面舰艇搜索的区域示意图
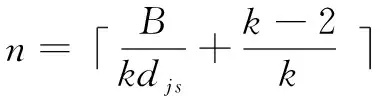
最后,确定基准浮标到水面舰艇队列线的距离。


图8 队形配置示意图
将图8左下侧区域放大,并作相应的辅助线,如图9所示,可知基准浮标到水面舰艇队列线的距离为
=||+||
(9)

图9 队形配置左下侧区域放大图
其中:
(10)
||=||tan=(||-||)tan=
(-)tan
(11)
将(10)、(11)式,代入(9)式,化简得

(12)
3 仿真验证
下面,通过一个案例,验证队形配置的可行性。不妨假设在宽为30n mile、长为60n mile的搜索带内,可能存在某潜艇。水面舰艇与反潜巡逻机等性能参数如表1所示。
表1 兵力参数表
3.1 确定水面舰艇的队形和位置点
由(1)式,可得水面舰艇的队形宽度为20 n mile。由(3)式,若间隔系数取1.5,可得水面舰艇的数量为4艘。因此,水面舰艇的实际间隔为6.7 n mile。
3.2 确定声呐浮标的阵形和位置点
首先,确定声呐浮标的阵形。由(4)式,可得反潜巡逻机布设的声呐浮标阵的长度为24 n mile。由(6)式,若间隔系数取1.5,可知布设的数量为16 pcs,实际间隔为3 km。据此,对于长为60 n mile的搜索带的两侧,需要3次布设声呐浮标。其中,第1次布设在时刻,两侧分别布设16 pcs,声呐浮标间隔为3 km;第2次布设在+2,两侧分别布设16 pcs,声呐浮标间隔为3 km;第3次布设在+4,两侧分别布设9 pcs,声呐浮标间隔为2.8 km。3次共需要布设声呐浮标82 pcs。为保证与声呐浮标阵的通信,反潜巡逻机每次在两侧声呐浮标阵之间的中心区域作环形或8字形航线飞行。
其次,确定声呐浮标的位置点。由(7)式,可得声呐浮标和侧翼舰艇的最小间隔为8 n mile。由(7)、(8)、(12)式,可得基准浮标到水面舰艇队列线的距离为3.5 n mile。确定了基准浮标的位置点,依次确定其他声呐浮标的位置点,即可完成整个队形的配置。
综上分析,反潜巡逻机3次布设声呐浮标阵后,队形配置如图10、11所示。对于宽为30 n mile、长为60 n mile的搜索带,共需要4艘水面舰艇、1架反潜巡逻机组成协同检查搜潜编组执行任务,搜索时间为5 h,两侧共需要布设声呐浮标82 pcs。
图10 第1、2次布设声呐浮标阵后队形配置示意图
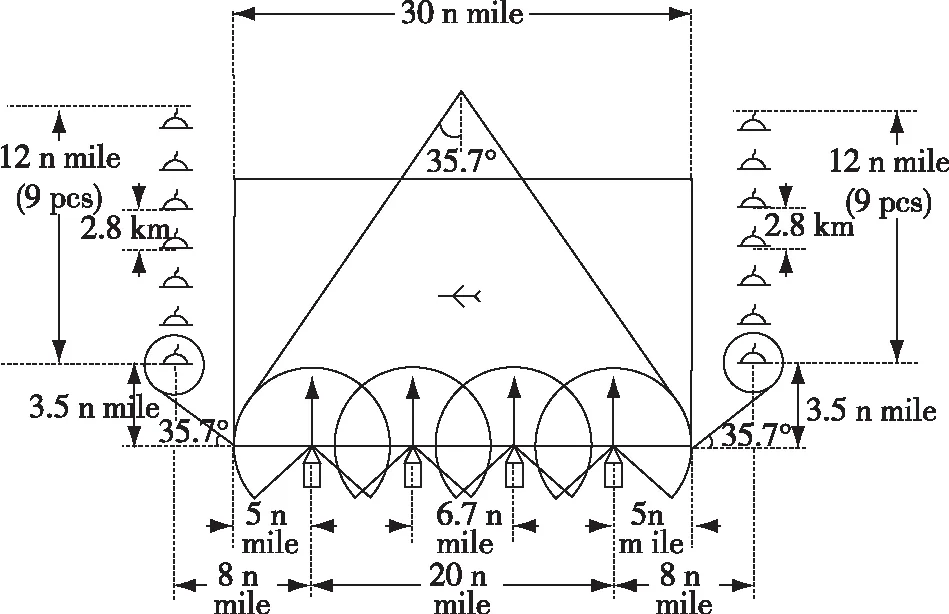
图11 第3次布设声呐浮标阵后队形配置示意图
4 结束语
本文运用相对运动原理和数学方法,对水面舰艇与反潜巡逻机协同检查搜潜进行了建模分析,探讨了配置原理和计算公式,并仿真验证了其可行性。在实际运用中,若搜索区域较大,通过计算发现需要的搜潜兵力较多时,可先将区域进行分区处理,后再运用该模型配置队形。在研究过程中,也存在一些不足,如未研究水面舰艇使用拖曳线列阵声呐或采取曲折机动等情况,这些问题还有待后续进一步研究分析。
猜你喜欢
兵器知识(2021年3期)2021-07-13
科学导报·学术(2020年26期)2020-10-21
作文大王·低年级(2019年6期)2019-08-01
军工文化(2019年4期)2019-05-24
妇女(2018年7期)2018-09-19
电子技术与软件工程(2018年7期)2018-02-25
兵器知识(2017年10期)2017-10-19
现代兵器(2016年12期)2016-12-22
现代兵器(2016年12期)2016-12-22
现代电子技术(2014年24期)2014-12-18
